U4_1:图论之DFS/BFS/TS/Scc
文章目录
- 一、图的基本概念
- 二、广度优先搜索(BFS)
-
- 记录
- 伪代码
- 时间复杂度
- 流程
- 应用
- 三、深度优先搜索(DFS)
-
- 记录
- 伪代码
- 时间复杂度
- 流程
- 时间戳结构
- BFS和DFS比较
- 四、拓扑排序
-
- 一些概念
-
- 有向图
- 作用
- 拓扑排序
- 分析
- 伪代码
- 时间复杂度
- 彩蛋
- 五、强连通分量-SCC
-
- 分析
- 伪代码
- 时间复杂度
一、图的基本概念
由点(vertices)和边(edges)组成
G = ( V , E ) G=(V,E) G=(V,E), ∣ V ∣ = n |V|=n ∣V∣=n, ∣ E ∣ = m |E|=m ∣E∣=m (这里默认有向图,无向图用 G G G = = ={ V V V, E E E}表示
顶点的度是关联在其上的边的数量。满足 ∑ d e g r e e ( v ) = 2 ∣ E ∣ \sum degree(v)=2|E| ∑degree(v)=2∣E∣(握手定理)
路径:一个序列 < V 0 , V 1 , . . . , V k >
简单路径:序列中所有顶点都是不同的。
环:一个路径 < V 0 , V 1 , . . . , V k >
简单环: V 1 , V 2 , . . . , V k V_1,V_2,...,V_k V1,V2,...,Vk是不同的。
连通:两个点之间存在路径。每个顶点对之间都连通,则这个图是连通的
连通分量:两点之间连通的最大集合的个数(等价类)。如下图:

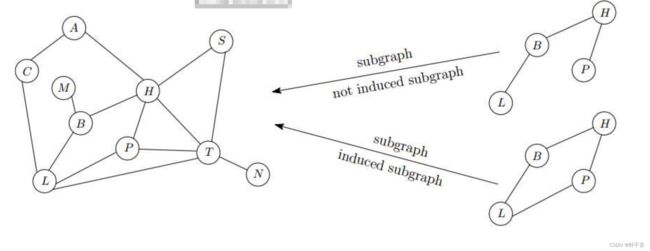
子图: G ′ G' G′的点和边都属于 G G G
诱导子图: G ′ G' G′的点属于 G G G,且连接点的所有边都要属于 G ′ G' G′
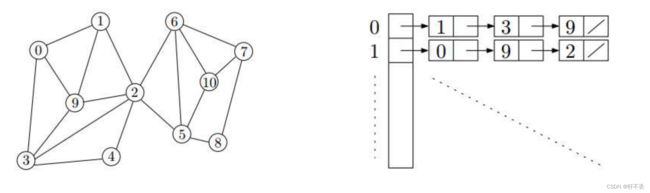
邻接表Adj:用链表连接每个点的边。因此是遍历了每个点和每条边,因此时间复杂度 T ( n ) = O ( V + E ) T(n)=O(V+E) T(n)=O(V+E)
邻接矩阵: A = [ a i j ] , a i j = 1 A=[a_{ij}],a_{ij}=1 A=[aij],aij=1 i f ( v i , v j ) 属于 E if(v_i,v_j)属于E if(vi,vj)属于E,否则 a i j = 0 a_{ij}=0 aij=0
因为不管怎样任意两点间有无边都要判断一遍,因此时间复杂度 T ( n ) = O ( V 2 ) T(n)=O(V^2) T(n)=O(V2)

二、广度优先搜索(BFS)
用处:遍历图中的所有顶点,从而显示图的属性
记录
三个数组用于保存遍历期间收集的信息。
- c o l o r [ u ] color[u] color[u]:访问的每个顶点的颜色
W H I T E WHITE WHITE:未发现
G R A Y GRAY GRAY:已发现但未完成处理
B L A C K BLACK BLACK:已完成处理 - p r e d [ u ] pred[u] pred[u]:前一个指针:指向发现u的顶点
- d [ u ] d[u] d[u]:从源到顶点u的距离
伪代码
BFS(G)
for u in V do
color[u] ← WHITE;
pred[u] ← NULL;
end
for u in V do
if color[u] is equal to WHITE then
BFSVisit(u);
end
end
BFSVisit(s)
color[s] ← GRAY,d[s] ← 0;
set Q a queue
Enqueue(Q,s)
while Q is not empty do
u ← Dequeue(Q)
for v is belong to Adj[u] do (邻接表遍历的)
if(color[v] = WHITE) then
color[u] ← GRAY
d[v] ← d[u]+1
pred[v] ← u
Enqueue(Q,v)
end
end
color[u] ← BLACK
end
时间复杂度
每一次循环遍历,都是遍历一个点和其边,且边遍历过了其他边就不会再遍历,因此
T ( n ) = ∑ O ( 1 + d e g r e e ( u ) ) = O ( V + E ) T(n)=\sum O(1+degree(u))=O(V+E) T(n)=∑O(1+degree(u))=O(V+E)
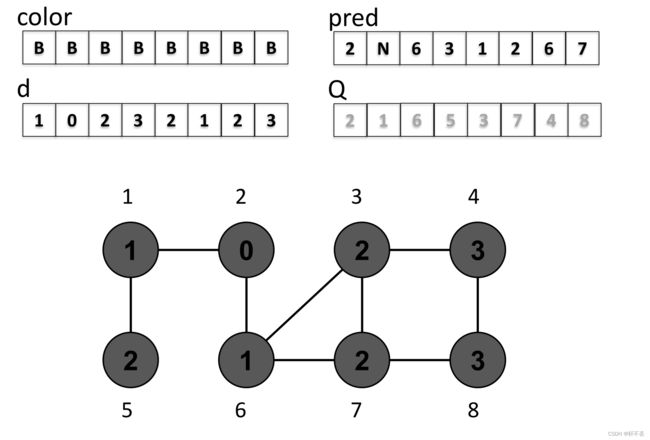
流程
一次BFSVisit,能将连通分量遍历完
应用
- 最短路径问题
- 查找连通分量
三、深度优先搜索(DFS)
用处:同样也是遍历图中的所有顶点,从而显示图的属性
记录
四个数组用于保存遍历期间收集的信息。
- c o l o r [ u ] color[u] color[u]:访问的每个顶点的颜色
W H I T E WHITE WHITE:未发现
G R A Y GRAY GRAY:已发现但未完成处理
B L A C K BLACK BLACK:已完成处理 - p r e d [ u ] pred[u] pred[u]:前一个指针:指向发现u的顶点
- d [ u ] d[u] d[u]:发现时间。(设置一个全局变量时间发生器)
- f [ u ] f[u] f[u]:结束时间。一个计数器,指示顶点u(及其所有后代)的处理何时完成
伪代码
DFS(G)
for u in V do
color[u] ← WHITE;
pred[u] ← NULL;
end
time ← 0
for u in V do
if color[u] is equal to WHITE then
DFSVisit(u);
end
end
DFSVisit(u)
color[u] ← GRAY,d[u] ← ++time;
set Q a queue
Enqueue(Q,s)
for v is belong to Adj[u] do (邻接表遍历的)
if(color[v] = WHITE) then
pred[v] ← u
DFSVisit(v)
end
end
color[u] ← BLACK
f[u] ← ++time;
时间复杂度
同样,每一次循环遍历,都是遍历一个点和其边,且边遍历过了其他边就不会再遍历,因此
T ( n ) = ∑ O ( 1 + d e g r e e ( u ) ) = O ( V + E ) T(n)=\sum O(1+degree(u))=O(V+E) T(n)=∑O(1+degree(u))=O(V+E)
流程

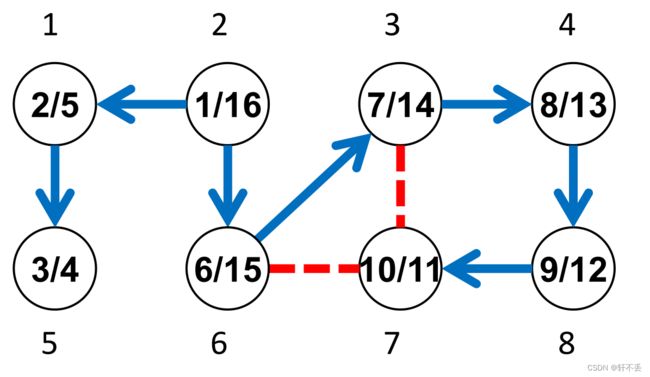
时间戳结构

由图可知, u u u是 v v v的后代(在 D F S DFS DFS树中),当且仅当 [ d [ u ] , f [ u ] ] [d[u],f [u]] [d[u],f[u]]是 [ d [ v ] , f [ v ] ] [d[v],f [v]] [d[v],f[v]]的子区间
树边: i f ( u , v ) ∈ E f if (u, v)∈E_f if(u,v)∈Ef等价 u = p r e d [ v ] u = pred[v] u=pred[v],即 u u u是 D F S DFS DFS树中 v v v的前身(图中蓝色边)
后边缘:如果 v v v是 D F S DFS DFS树中 u u u的祖先(不包括前身)(图中红色边)
有边就有祖先和后代的关系
BFS和DFS比较
BFS是发现点之后先处理,DFS是发现点之后不处理,继续往下去找其他的点。
四、拓扑排序
一些概念
有向图
有向图,区分边(u, v)和边(v, u)
顶点的出界度是离开它的边的数量,顶点的入界度是进入它的边的数量
每条边(u, v)对u的出阶贡献1次,对v的入阶贡献1次
∑ o u t − d e g r e e ( v ) = ∑ i n − d e g r e e ( v ) = ∣ E ∣ \sum out-degree(v)=\sum in-degree(v)=|E| ∑out−degree(v)=∑in−degree(v)=∣E∣
作用
有向图通常用于表示顺序相关的任务,也就是说,我们不能在另一个任务完成之前启动一个任务。
边(u, v)表示任务u完成后才能启动任务v。
显然,要使系统不挂起,图必须是无环的,它必须是有向无环图(或DAG)
拓扑排序
拓扑排序是一种针对有向无环图的算法,对顶点进行线性排序,使得对于DAG中的每条边(u, v), u在线性排序中出现在v之前。
它可能不是唯一的,因为有许多“不兼容”的元素。
分析
- 起始顶点入度必须为0,如果这样的顶点不存在,图就不是无环的。
- 一个入度为0的顶点是一个可以马上开始的任务。所以我们可以先以线性顺序输出它.
- 如果输出一个顶点u,那么所有的边(u, v)都不再有用,因为任务v不再需要等待u。
- 去掉顶点u后,新图仍然是一个有向无环图
- 重复步骤2-4,直到没有顶点留下
伪代码
Initialize Q to be an empty queue
for u is belong to V do then
if u.in_degree is equal to 0 then
Enqueue(Q,u)
end
end
while Q is not empty do
u ← Dequeue(Q)
Output u;
for v is belong to Adj(u) do
v.in_degree ← v.in_degree-1
if v,in_degree is equal to 0 then
Enqueue(Q,v)
end
end
end
时间复杂度
依旧是每条边和每个顶点都遍历一遍,因此时间复杂度 T ( n ) = O ( V + E ) T(n)=O(V+E) T(n)=O(V+E)
彩蛋
也可用DFS求出拓扑序列,对于每个有向边,都有 f [ u ] > f [ v ] f[u]>f[v] f[u]>f[v]
在时间O(V+E)内计算出 D A G DAG DAG(有向无环图)中的单源最短路径:动态规划
五、强连通分量-SCC
任意两点之间都有路径,再增加一个点都不满足这个关系。
任何两个强连通分量交集都为空
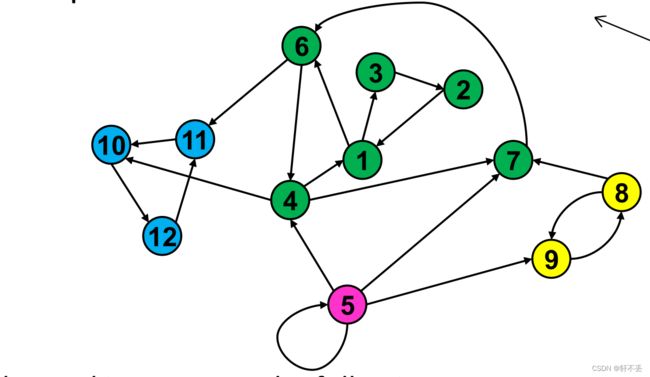
找到一个算法,求一个图得所有连通分量
分析
- 对G中所有边的方向进行反转,得到逆图GR。
- 执行DFS,并获得GR中顶点变黑的序列,即每当一个顶点从堆栈中弹出时,将其附加到序列 L R L^R LR中,将 L R L^R LR倒序得到序列L
- 对原图G执行DFS,规则如下
规则1:从L的第一个顶点开始DFS
规则2:当需要重新开始时,从L的第一个仍然是白色的顶点开始
将每个dfs树中的顶点输出为SCC

伪代码
R ← {}
Reverse G and get G'
DFS G' and get L'
reverse L' and get L
for u属于L do
if color[u] is WHITE then
Lscc ← DFSVisit(G,u)
R ← RUSet(Lscc)
end
end
时间复杂度
翻转边需要遍历每个点和边,时间复杂度为 O ( V + E ) O(V+E) O(V+E),DFS时间复杂度为 O ( V + E ) O(V+E) O(V+E),,然后还是依次遍历每个点和边,时间复杂度也是 O ( V + E ) O(V+E) O(V+E),因此总时间复杂度为 T ( n ) = O ( V + E ) T(n)=O(V+E) T(n)=O(V+E)