STM32 高级定时器 输出PWM波
本人纯小白一枚,如有错误,还请大佬指出
目录
1.定时器引脚图
2.总体框架
2.1时基模块
2.2比较寄存器
2.3死区发生器
2.4输出控制
3.结构体
4.编程
5.说明
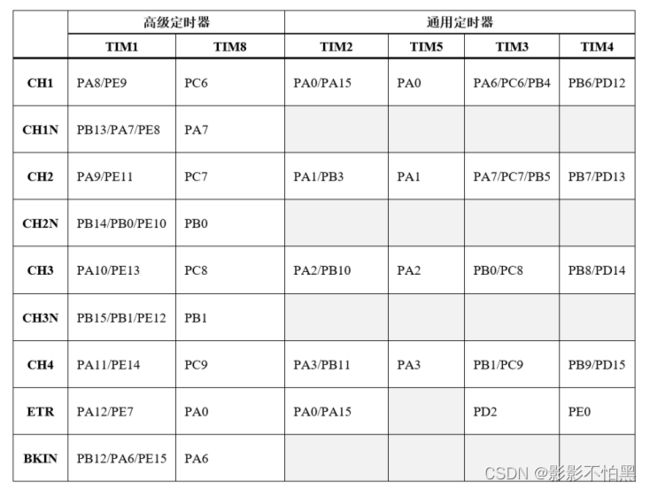
1.定时器引脚图
2.总体框架
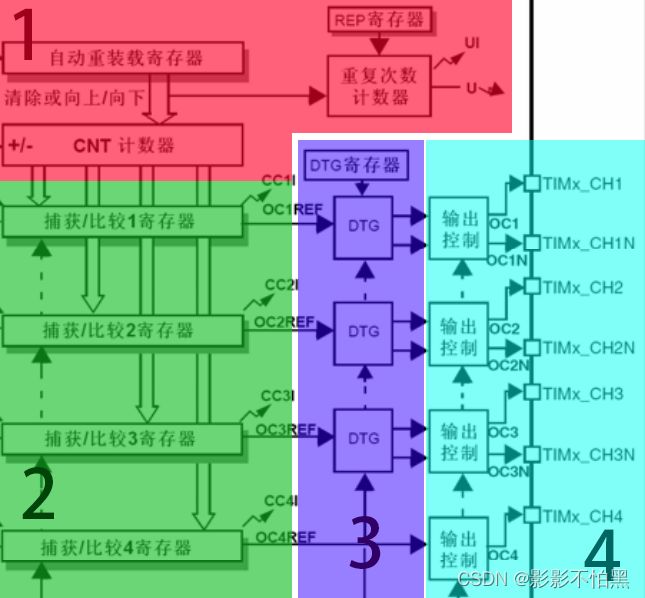
注:高级定时器除了通用定时器所具有的输入捕获和输出比较功能外,另外还添加了可编程死区互补输出、重复计 数器、带刹车 (断路) 功能,本文章只截取了其中的输出比较框图。
我将高级定时器的框架分为4个部分:时基模块、比较寄存器、死区发生器、输出控制。
2.1时基模块
高级定时器时钟源有4个,这里仅介绍内部时钟源
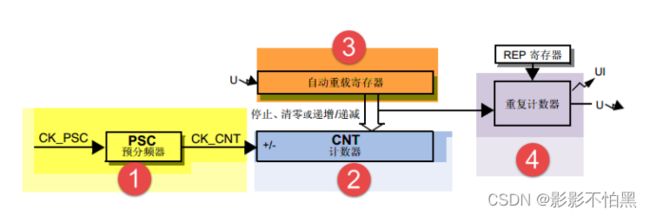
时基单元框架如图
将此分为4部分:1.预分频器PSC,可实现1-65536的分频。2.计数器 CNT:三种计数模式,递增计数模式、递减计数模式和递增/递减 (中 心对齐) 计数模式。3.自动重载寄存器 ARR及4.重复计数器 RCR
这里与基本定时器不一样的就是三种计数模式及重复计数器。
通俗来讲就是,循环从0(或最大值)往上(或往下数),当数到最大值(或0),可以发生中断或者事件,而当使用了重复计数器后,数特定的遍数会产生中断1或者事件。其中往上或者往下计数则取决于计数模式。
而本次输出PWM波,不需要采用中断,只需其计数功能即可。
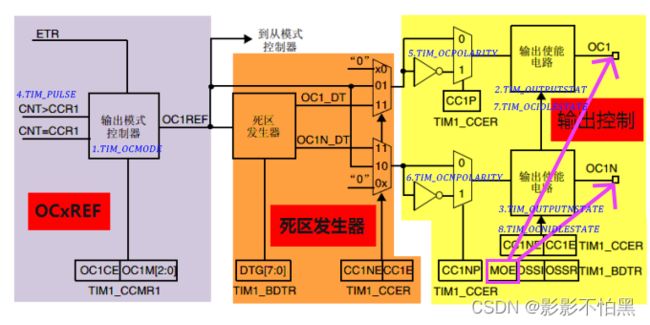
2.2比较寄存器

当计数器 CNT 的值跟比较寄存器 CCR 的值相等的时候,输出参考信号 OCxREF 的信号的极性 就会改变,其中 OCxREF=1(高电平)称之为有效电平,OCxREF=0(低电平)称之为无效电平。
此处输出的信号为OCxREF.
在进入死区发生器之前,可以设置输出比较模式,对于输出PWM波而言,有两个模式可供选择,分别为PWM1,PWM2

2.3死区发生器
在经过死区发生器之后会产生两路带死区的互补 信号 OCx_DT 和 OCxN_DT。如果没有加入死区控制,那么进入输出控制电 路的信号就直接是 OCxREF。
单纯的PWM波,此处不做详细介绍。
2.4输出控制
由死区发生器输出的信号会被分成两路,一路是原始信号,一路是被反向的信号,具体的由寄存器 CCER 的位 CCxP 和 CCxNP 控制。经过极性选择的信号是否由 OCx 引脚输出到外部引脚 CHx/CHxN (即是否使能),则由寄存器 CCER 的位 CxE/CxNE 配置。
3.结构体
typedef struct
{
uint16_t TIM_Prescaler; //时钟预分频,对应PSC
uint16_t TIM_CounterMode; //时钟计数模式,对应3中计数方法
uint16_t TIM_Period; //定时器周期,对应ARR寄存器
uint16_t TIM_ClockDivision; //时钟分频,设置定时器时钟 CK_INT 频率与死区发生器以及数字滤
//波器,采样时钟频率分频比。可以选择 1、2、4 分频。
uint8_t TIM_RepetitionCounter; //重复计数器,对应RAR
} TIM_TimeBaseInitTypeDef;
typedef struct
{
uint16_t TIM_OCMode; //输出模式,PWM1及PWM2,对应寄存器CCMR1->OCxM
uint16_t TIM_OutputState; //比较输出使能,对应CCER->CCxE
uint16_t TIM_OutputNState; //比较互补输出使能,对应CCER->CCxNE
uint16_t TIM_Pulse; //脉冲宽度,即比较寄存器的值,对应CCR1
uint16_t TIM_OCPolarity; //输出极性,对应CCER->CCxP
uint16_t TIM_OCNPolarity; //互补输出极性,对应CCER->CCxP
uint16_t TIM_OCIdleState; //空闲状态比较输出状态,对应CR2->OIS1
uint16_t TIM_OCNIdleState; //空闲状态下比较互补输出状态,对应CR2->OIS1N
} TIM_OCInitTypeDef;
配置pwm的结构体主要用到两个,一个是时基初始化的结构体,一个是输出比较的结构体,时基初始化的结构体
其中输出比较的结构体对应图中的寄存器如下图

但是我们除了要配备这两个结构体之外,还有一个寄存器要使能
对应BDER->MOE寄存器,官方介绍如下图
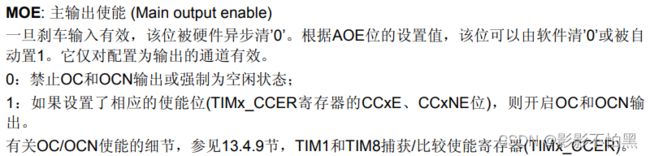
就是使能输出引脚
4.编程
总结一下,编程的目标:
1.对通道的GPIO引脚进行配置
2.对两个结构体进行配置
3.使能时钟源,使能输出通道
以下程序配置的为1Khz,占空比为40%的PWM波
void advance_tim1_gpio_config(void)
{
//1.结构体
GPIO_InitTypeDef GPIO_InitStructure;
//2.开时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//3.配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
//4.初始化
GPIO_Init(GPIOA, &GPIO_InitStructure);
//5.使能(无)
}
void advance_tim1_mode_config()
{
//1.结构体,时基结构体及输出比较结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//2.开时钟,TIM1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
//3.配置及初始化
/*--------------------时基结构体初始化-------------------------*/
// PWM 信号的频率 F = TIM_CLK/{(ARR+1)*(PSC+1)}
TIM_TimeBaseStructure.TIM_Period = 9; //ARR寄存器的值
TIM_TimeBaseStructure.TIM_Prescaler = 7199; //PSC分频的值
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseStructure.TIM_RepetitionCounter=0; //重复计数器为0
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
/*--------------------输出比较结构体初始化-------------------*/
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出模式:PWM1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 4; //设置占空比
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //有效电平
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set; //空闲时比较输出状态
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
//4.使能,此处使能为将内部时钟作为TIM1时钟源的使能
TIM_Cmd(TIM1, ENABLE); //使能计数器
TIM_CtrlPWMOutputs(TIM1, ENABLE); //使能输出通道
}
说明:ARR寄存器与PSC寄存器都是从0开始计数,所以值要减一。
PWM波频率=TIM_CLK/{(ARR+1)*(PSC+1)}
其中TIM_CLK一般是APB2的频率,因为TIM1挂载在APB2中,APB2一般为72Mhz
占空比=TIM_OCInitStructure.TIM_Pulse/(ARR+1)
个人配置PWM波,一般如以下步骤
1.确认PWM波的频率
2.确认PWM波的精度(对应ARR寄存器)
3.确认占空比,TIM_OCInitStructure.TIM_Pulse
另外,有一个函数专门修改占空比(即修改TIM_OCInitStructure.TIM_Pulse的值),我之前不知道,还自己写了一个(大家避坑)
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
5.说明
除了本文章说明的寄存器,还有一些预装载函数,如TIM_OC1PreloadConfi();
等,此函数对应CCMR->OC1PE,但是我暂时并不需要此功能,所以不做详细介绍。
官方说明如下: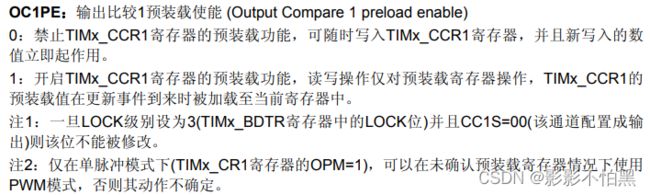 此外,对于时基单元,个别寄存器下有阴影,对应影子寄存器,也不作详细介绍。
此外,对于时基单元,个别寄存器下有阴影,对应影子寄存器,也不作详细介绍。
后续会出一篇PWM波控制电调的文章。
参考文献有《STM32F10x-中文参考手册》《STM32库开发实战指南——基于野火指南者开发板》