正点原子linux阿尔法开发板使用——Linux中断实验
中断
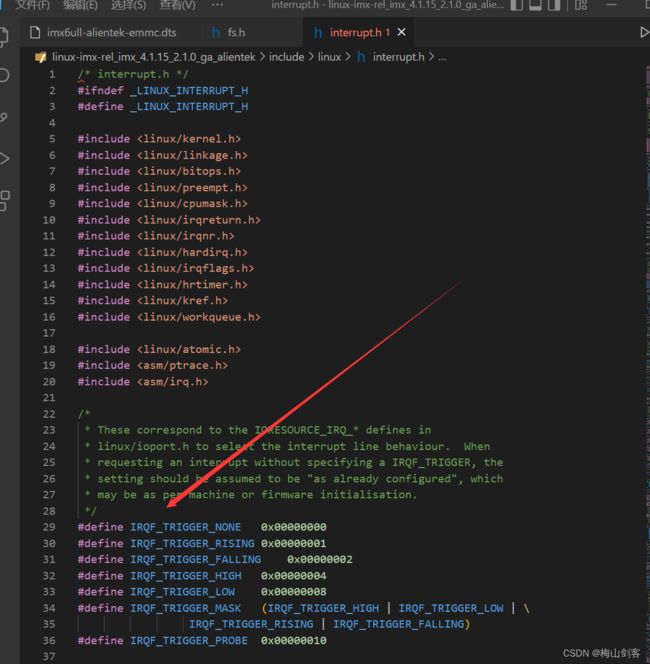
1、先知道需要使用的中断对应的中断号
2、先申请request_irq,此函数会激活中断。
3、如果不用中断了,那就时放点,free_irq;
4、中断处理函数 irqreturn_t (*irq_handler_t) (int, void *)
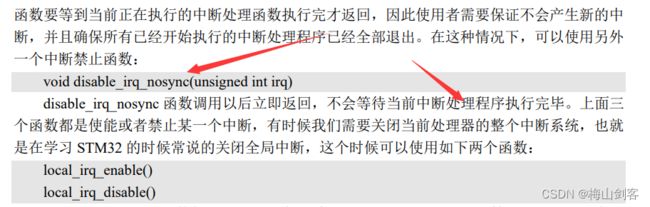
5、5、中断使能与禁止函数
常用的中断使用和禁止函数如下所示:
void enable_irq(unsigned int irq)
void disable_irq(unsigned int irq)
2022.5.31
上半部和下半部
上半部分占用时间少,下半部分占用时间多。
中断处理一定要越快越好。
参考点:
①、如果要处理的内容不希望被其他中断打断,那么可以放到上半部。
②、如果要处理的任务对时间敏感,可以放到上半部。
③、如果要处理的任务与硬件有关,可以放到上半部
④、除了上述三点以外的其他任务,优先考虑放到下半部。
1、软中断
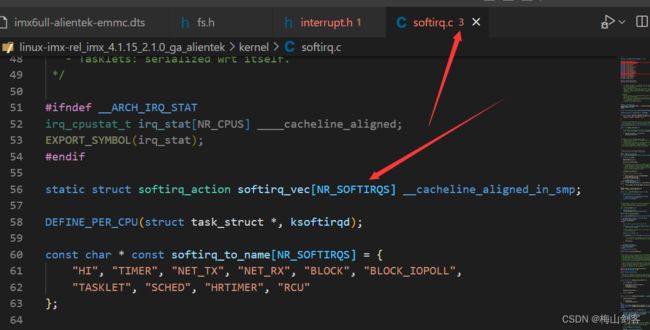
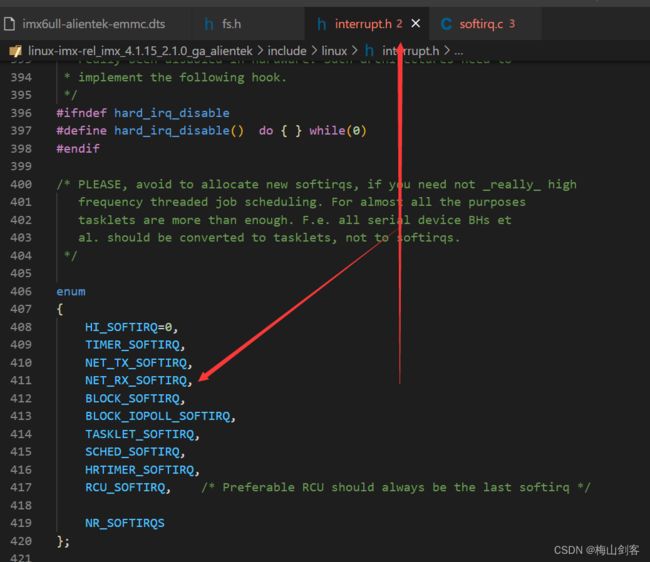
要先注册软中断、要先注册。软中断要在编译的时候静态使用!!!

触发软中断:

*** 软中断不要去用!!!
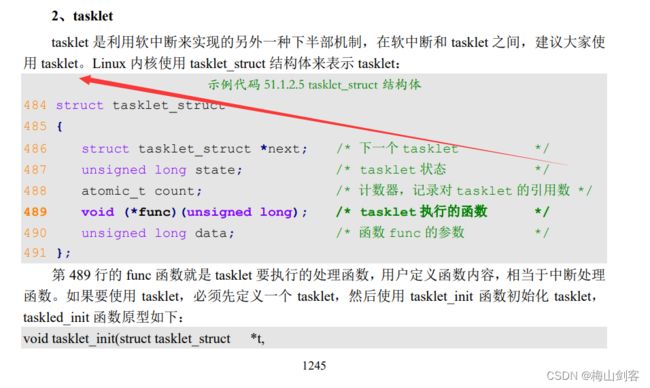
也需要使用到上半部,只是在上半部的中断处理函数重点调用的是tasklet_schedule。
1、定义一个tasklet。
2、初始化、重点是设置对应的处理函数。

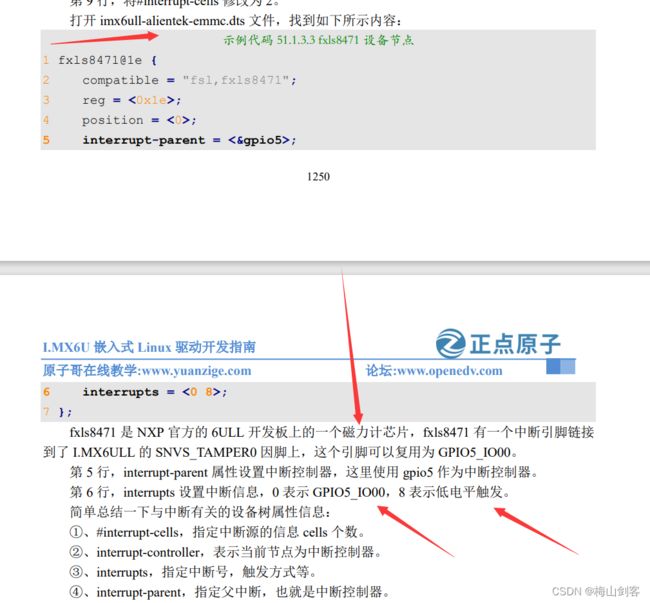
对于 gpio 来说,gpio 节点也可以作为中断控制器,比如 imx6ull.dtsi 文件中的 gpio5 节点内容如下所示:
示例代码 51.1.3.2 gpio5 设备节点
gpio5: gpio@020ac000 {
compatible = "fsl,imx6ul-gpio", "fsl,imx35-gpio";
reg = <0x020ac000 0x4000>;
interrupts = <GIC_SPI 74 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 75 IRQ_TYPE_LEVEL_HIGH>;
gpio-controller;
#gpio-cells = <2>;
interrupt-controller;
#interrupt-cells = <2>;
};
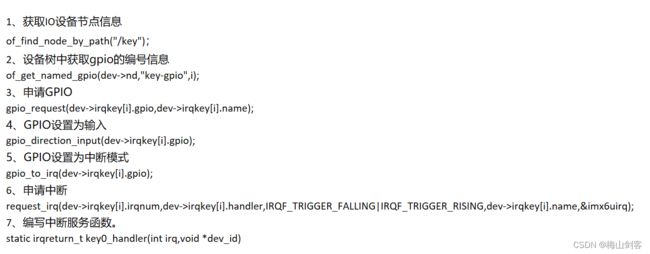
如果需要写驱动的话 需要做的事情。
驱动代码编写
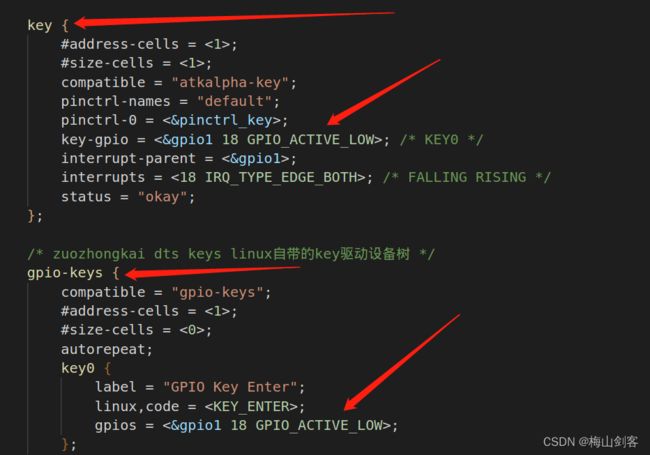
添加中断信息
key {
#address-cells = <1>;
#size-cells = <1>;
compatible = "atkalpha-key";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_key>;
key-gpio = <&gpio1 18 GPIO_ACTIVE_LOW>; /* KEY0 */
interrupt-parent = <&gpio1>;
interrupts = <18 IRQ_TYPE_EDGE_BOTH>; /* FALLING RISING */
status = "okay";
};
加载驱动失败的原因是因为:
两个节点都使用了 同一个GPIO
原厂驱动代码解析 按键设备树。
#include 中断处理流程
中断下文使用
