TSP驱动理论与实例分析
文章目录
- 前言
- 一、设备树编写
-
- IIC设备地址:
- 复位管脚配置
- 中断管脚配置
- 二、驱动分析
-
- 数据设定和数据结构
- probe 解析
- 硬件相关基础设定
- IIC读取函数解析
- 设备模型添加
- 中断服务函数
- 总结
- 本驱动相对于原版驱动的改动
- 将驱动添加到内核
- tslib 移植与使用
- 使用内核自带的驱动
前言
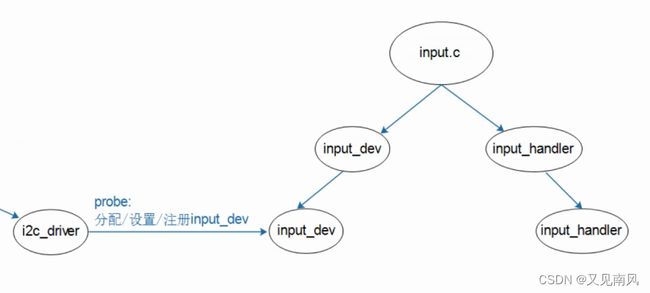
如果是从IIC协议跳转过来的,那么还需要了解一个 input 子系统。
触摸屏驱动虽然用的协议是 IIC,也就是说驱动架构是 IIC 驱动,但是在IIC驱动中又把任务都丢给了 input 子系统,而且还要再 IIC 消息中还包装硬件业务。
内核未修改过的源码位置:kernel/drivers/input/touchscreen/edt-ft5x06.c
先来了解一下 FT5x06系列的芯片。

内部框图如下:
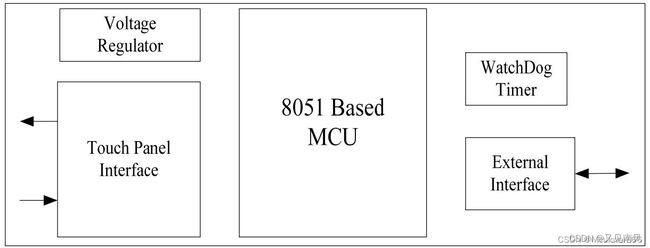
与主控制器的连接示意图如下:

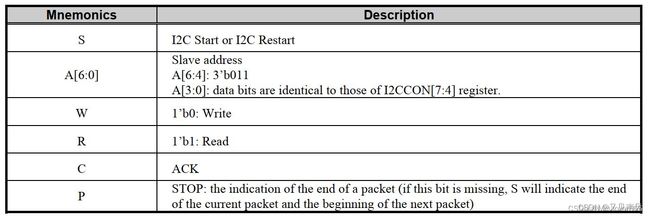
串行接口支持I2C(最大400KHz)和SPI,I2C的通信格式如下:

一、设备树编写
先上触屏芯片硬件原理图:


绿色的框框里就是IIC触屏模块的4个引脚,分别是:IIC时钟、IIC数据、中断引脚、复位引脚
知道这4个管脚之后,就可以直接配置设备树了吗???
那肯定不行啊,从机地址是多少?中断是什么电平触发?复位呢?这些都需要知道。还有就是要传给驱动什么参数好?例如屏幕大小,不传当然也可以,但是这些特定的东西在设备树解决明显就更好。这样驱动就可以用在不同大小的屏幕上了。
IIC设备地址:
I2C协议格式中slave address = chip address由7位地址D[7:1]组成 + 1位R/W读写位D[0]组成的。
I2C通用器件的器件地址=种类型号(D[7:4])+及寻址码D[3:1]组成的,共7位。
- 高4位代表器件类型:由D7-D4 决定的
这是由半导公司生产时就已固定此类型的了,也就是说这4位已是固定的。 - 低3位:用户自定义地址码
触屏芯片的数据手册直接就给出了:0111 000,这样的从机地址,那么可以确定生产商已经写死了从机地址了。
0111 000 等价于16进制的:0x38
那么设备树中的 reg 属性就为:reg = <0x38>;

复位管脚配置
可以看到管脚是 GPIO0_B6,这个先放一边,看芯片手册如何描述这个管脚。

没有过多的描述,就是没事干就把它置为低电平就可以,并且有事也是处理器给发信号,所以连接该管家的gpio是输出模式。
reset-gpio = <&gpio0 RK_PB6 GPIO_ACTIVE_LOW>; //引用gpio0 将RK_PB6号管脚设置为低电平
中断管脚配置
可以看到管脚是 GPIO3_A5,并且是向处理器输入的。这个先放一边,看芯片手册如何描述这个管脚。
reset-gpio = <&gpio0 RK_PB6 GPIO_ACTIVE_LOW>; //引用gpio0 将RK_PB6号管脚设置为低电平
这个管脚有点厉害,整个屏幕,不管你碰到哪里,都会由这个管脚向处理器发送一个信号,处理器可以配置这个管脚的信号为中断信号。

芯片手册中的中断描述全在这里了。当有一个有效的触控点时,INT会被拉起,当触控结束时就会变低。
所以就可以确定为:屏幕被触碰,INT 引脚向处理器输出脉冲信号。
那么我们就配置GPIO3_A5 为输入模式,上升沿触发中断。
touch-gpio = <&gpio3 RK_PA5 IRQ_TYPE_EDGE_RISING>; //这里很变态,直接对GPIO3_A5描述为上升沿触发中断,那么GPIO3_A5就是常态输入模式+低电平了……
interrupt-parent = <&gpio3>; //说明中断IO所属的组是 GPIO3
interrupts = <RK_PA5 IRQ_TYPE_LEVEL_LOW>; //要区分上面的中断触发条件,这里设置RK_PA5 号管脚设置为低电平触发
对初学者来说,这里非常离谱,但是其实并离谱,因为一个描述 gpio3 控制器,一个是描述中断控制器,习惯一下,后面没有更离谱的了。
总体的设备树就可以确定了,如下:
/* 针对触屏芯片 ft5x06 的设备树 */
&i2c1 {
status = "okay";
ft5x061:ft5x06@38 {
status = "okay";
compatible = "edt,edt-ft5306"; //驱动匹配名
reg = <0x38>; //IIC从机地址
touch-gpio = <&gpio3 RK_PA5 IRQ_TYPE_EDGE_RISING>;
interrupt-parent = <&gpio3>;
interrupts = <RK_PA5 IRQ_TYPE_LEVEL_LOW>; //中断信号输入管脚为GPIO3的A5
reset-gpio = <&gpio0 RK_PB6 GPIO_ACTIVE_LOW>; //复位输出管脚为GPIO0的B6
/* 屏幕尺寸参数,这些属于厂商驱动实现的,我们需要改设备树即可*/
touchscreen-size-x = <800>;
touchscreen-size-y = <1280>;
touch_type = <1>;
};
};
/* 需要看 IIC1 控制器配置的可以看一下,下面两个是原厂配好的,我们需要会引用 */
i2c1 {
/omit-if-no-ref/
i2c1_xfer: i2c1-xfer {
rockchip,pins =
/* i2c1_scl */
<0 RK_PB3 1 &pcfg_pull_none_smt>,
/* i2c1_sda */
<0 RK_PB4 1 &pcfg_pull_none_smt>;
};
};
i2c1: i2c@fe5a0000 {
compatible = "rockchip,rk3399-i2c";
reg = <0x0 0xfe5a0000 0x0 0x1000>;
clocks = <&cru CLK_I2C1>, <&cru PCLK_I2C1>;
clock-names = "i2c", "pclk";
interrupts = <GIC_SPI 47 IRQ_TYPE_LEVEL_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&i2c1_xfer>;
#address-cells = <1>;
#size-cells = <0>;
status = "disabled";
};
二、驱动分析
注意一件事:工作的时候千万不要自己写驱动!!!
还有就是这个芯片中会有几种不同的工作模式,不同的工作模式所用的寄存器有差异,这个要根据芯片手册来实现。
但是成熟的芯片一般都是应用很广的,一般驱动工程师只需要知道它有这个功能,移植的时候可以避开迷惑就够了。
数据设定和数据结构
/* 触摸屏设备寄存器地址 */
#define WORK_REGISTER_THRESHOLD 0x00
#define WORK_REGISTER_REPORT_RATE 0x08
#define WORK_REGISTER_GAIN 0x30
#define WORK_REGISTER_OFFSET 0x31
#define WORK_REGISTER_NUM_X 0x33
#define WORK_REGISTER_NUM_Y 0x34
/* 触摸屏设备固件版本 */
#define M09_REGISTER_THRESHOLD 0x80
#define M09_REGISTER_GAIN 0x92
#define M09_REGISTER_OFFSET 0x93
#define M09_REGISTER_NUM_X 0x94
#define M09_REGISTER_NUM_Y 0x95
/* 无效寄存器 */
#define NO_REGISTER 0xff
/*工作模式*/
#define WORK_REGISTER_OPMODE 0x3c
#define FACTORY_REGISTER_OPMODE 0x01
/*触摸事件*/
#define TOUCH_EVENT_DOWN 0x00 //按下
#define TOUCH_EVENT_UP 0x01 //抬起
#define TOUCH_EVENT_ON 0x02
//接触
#define TOUCH_EVENT_RESERVED 0x03 //保留
#define EDT_NAME_LEN 23 //设备名长度
#define EDT_SWITCH_MODE_RETRIES 10 //切换I2C模式延时(命令模式,数据模式)
#define EDT_SWITCH_MODE_DELAY 5 /* msec */
#define EDT_RAW_DATA_RETRIES 100
//用于dev_dbg调试的重发次数
#define EDT_RAW_DATA_DELAY 1000 /* usec */
enum edt_ver {
EDT_M06,
EDT_M09,
EDT_M12,
GENERIC_FT,
};
struct edt_reg_addr {
int reg_threshold;
int reg_report_rate;
int reg_gain;
int reg_offset;
int reg_num_x;
int reg_num_y;
};
struct edt_ft5x06_ts_data {
struct i2c_client *client;
struct input_dev *input;
struct touchscreen_properties prop;
u16 num_x;
u16 num_y;
struct gpio_desc *reset_gpio;
struct gpio_desc *wake_gpio;
#if defined(CONFIG_DEBUG_FS)
struct dentry *debug_dir;
u8 *raw_buffer;
size_t raw_bufsize;
#endif
struct mutex mutex;
bool factory_mode;
int threshold;
int gain;
int offset;
int report_rate;
int max_support_points;
char name[EDT_NAME_LEN];
struct edt_reg_addr reg_addr;
enum edt_ver version;
};
struct edt_i2c_chip_data {
int max_support_points;
};
probe 解析
static int edt_ft5x06_ts_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
const struct edt_i2c_chip_data *chip_data;
struct edt_ft5x06_ts_data *tsdata; //设备结构体
u8 buf[2] = { 0xfc, 0x00 }; //用于I2C发送地址+读写位:fc00,0为写,1为读,先写入地址再接收回应
struct input_dev *input;
//输入设备
unsigned long irq_flags;
//中断号
int error;
char fw_version[EDT_NAME_LEN]; //固件版本名
dev_dbg(&client->dev, "probing for EDT FT5x06 I2C\n");
tsdata = devm_kzalloc(&client->dev, sizeof(*tsdata), GFP_KERNEL); //给设备(结构体)申请内核内存
if (!tsdata) {
dev_err(&client->dev, "failed to allocate driver data.\n");
return -ENOMEM;
}
chip_data = of_device_get_match_data(&client->dev); //匹配触摸屏设备数据
if (!chip_data)
chip_data = (const struct edt_i2c_chip_data *)id->driver_data;
if (!chip_data || !chip_data->max_support_points) {
dev_err(&client->dev, "invalid or missing chip data\n");
return -EINVAL;
}
tsdata->max_support_points = chip_data->max_support_points; //多点触摸的最大点数
tsdata->reset_gpio = devm_gpiod_get_optional(&client->dev,
"reset", GPIOD_OUT_HIGH); //获取复位管脚的GPIO描述符
if (IS_ERR(tsdata->reset_gpio)) {
error = PTR_ERR(tsdata->reset_gpio);
dev_err(&client->dev,
"Failed to request GPIO reset pin, error %d\n", error);
return error;
}
tsdata->wake_gpio = devm_gpiod_get_optional(&client->dev,
"wake", GPIOD_OUT_LOW); //获取唤醒管脚的GPIO描述符
if (IS_ERR(tsdata->wake_gpio)) {
error = PTR_ERR(tsdata->wake_gpio);
dev_err(&client->dev,
"Failed to request GPIO wake pin, error %d\n", error);
return error;
}
if (tsdata->wake_gpio) {
usleep_range(5000, 6000); //延时可以接受的范围是0.05s~0.06s
gpiod_set_value_cansleep(tsdata->wake_gpio, 1);
//在队列中等待访问引脚,可能会进入睡眠,不能作用于中断,访问必须通过消息总线比如I2C或者SPI,这些需要在队列中访问
//设置为高电平
}
if (tsdata->reset_gpio) {
usleep_range(5000, 6000); //延时可以接受的范围是0.05s~0.06s
gpiod_set_value_cansleep(tsdata->reset_gpio, 0); //设置为低电平
msleep(300); //延时300ms
}
input = devm_input_allocate_device(&client->dev); //申请输入设备
if (!input) {
dev_err(&client->dev, "failed to allocate input device.\n");
return -ENOMEM;
}
mutex_init(&tsdata->mutex); //初始化设备锁
tsdata->client = client; //设置设备通信使用的 IIC 客户端
tsdata->input = input; //使用申请到的输入设备
tsdata->factory_mode = false; //不用工厂模式
error = edt_ft5x06_ts_identify(client, tsdata, fw_version); //可以不理
if (error) {
dev_err(&client->dev, "touchscreen probe failed\n");
return error;
}
/*
* Dummy read access. EP0700MLP1 returns bogus data on the first
* register read access and ignores writes.伪读取访问。EP0700MLP1在第一次寄存器读取访问时返回伪数据并忽略写入。
*/
edt_ft5x06_ts_readwrite(tsdata->client, 2, buf, 2, buf); //buf[2] = { 0xfc, 0x00 },地址+读写位:fc00,0为写,1为读,先写入地址再接收回应
edt_ft5x06_ts_set_regs(tsdata); //设置触摸屏设备的寄存器地址
edt_ft5x06_ts_get_defaults(&client->dev, tsdata);
//获取设定的阈值、gain、偏移量并写入设备结构体
edt_ft5x06_ts_get_parameters(tsdata); //获取触摸屏各种参数
dev_dbg(&client->dev,
"Model \"%s\", Rev. \"%s\", %dx%d sensors\n",
tsdata->name, fw_version, tsdata->num_x, tsdata->num_y);
input->name = tsdata->name; //输入设备的名字用触摸屏设备的名字
input->id.bustype = BUS_I2C;
//输入设备的总线类型
input->dev.parent = &client->dev; //父设备指定为触摸屏设备的i2c设备
if (tsdata->version == EDT_M06 ||
tsdata->version == EDT_M09 ||
tsdata->version == EDT_M12) {
/* 设置上报的值的范围,dev:input_dev结构体
,axis:上报的数值,
min:最小值,
max:最大值,
fuzz:数据偏差值,
flat:平滑位置 */
input_set_abs_params(input, ABS_MT_POSITION_X,
0, tsdata->num_x * 64 - 1, 0, 0); //设置x坐标范围
input_set_abs_params(input, ABS_MT_POSITION_Y,
0, tsdata->num_y * 64 - 1, 0, 0); //设置y坐标范围
} else {
/* Unknown maximum values. Specify via devicetree */
input_set_abs_params(input, ABS_MT_POSITION_X,
0, 65535, 0, 0);
input_set_abs_params(input, ABS_MT_POSITION_Y,
0, 65535, 0, 0);
}
/* touchscreen_parse_properties 用于解析设备树的配置,除了管脚地址和复用,还有屏幕的各种参数 */
touchscreen_parse_properties(input, true, &tsdata->prop);
error = input_mt_init_slots(input, tsdata->max_support_points,
INPUT_MT_DIRECT);
if (error) {
dev_err(&client->dev, "Unable to init MT slots.\n");
return error;
}
i2c_set_clientdata(client, tsdata);
irq_flags = irq_get_trigger_type(client->irq); //获取中断类型
if (irq_flags == IRQF_TRIGGER_NONE)
irq_flags = IRQF_TRIGGER_FALLING; //没设置中断类型就设置成下降沿触发
irq_flags |= IRQF_ONESHOT; //一次性中断请求标志位。当一个中断线路设置了这个标志位时,只有在中断处理程序完成之后才能再次触发该中断
/* 请求中断号,devm 的申请卸载设备会自动释放的 */
error = devm_request_threaded_irq(&client->dev, client->irq,
NULL, edt_ft5x06_ts_isr, irq_flags,
client->name, tsdata);
if (error) {
dev_err(&client->dev, "Unable to request touchscreen IRQ.\n");
return error;
}
/* 设备文件增加到组中,就是再加一层目录封装*/
error = devm_device_add_group(&client->dev, &edt_ft5x06_attr_group);
if (error)
return error;
error = input_register_device(input); //注册输入设备
if (error)
return error;
edt_ft5x06_ts_prepare_debugfs(tsdata, dev_driver_string(&client->dev));
device_init_wakeup(&client->dev, 1); //唤醒触摸屏设备
dev_dbg(&client->dev,
"EDT FT5x06 initialized: IRQ %d, WAKE pin %d, Reset pin %d.\n",
client->irq,
tsdata->wake_gpio ? desc_to_gpio(tsdata->wake_gpio) : -1,
tsdata->reset_gpio ? desc_to_gpio(tsdata->reset_gpio) : -1);
return 0;
}
一些解析:
int input_mt_init_slots( struct input_dev *dev,
unsigned int num_slots,
unsigned int flags);
初始化 MT 的输入,使用前必须先初始化。
slots,num_slots:设备要使用的 SLOT 数量,也就是触摸点的数量
flags:其他一些 flags 信息,可设置的 flags 如下:
#define INPUT_MT_POINTER 0x0001 /* pointer device, e.g. trackpad /
#define INPUT_MT_DIRECT 0x0002 / direct device, e.g. touchscreen /
#define INPUT_MT_DROP_UNUSED0x0004 / drop contacts not seen in frame /
#define INPUT_MT_TRACK 0x0008 / use in-kernel tracking /
#define INPUT_MT_SEMI_MT 0x0010 / semi-mt device, finger count handled manually
struct gpio_desc *__must_check
evm_gpiod_get_index(struct device *dev, //设备节点
const char *con_id, //设备树中 GPIO 的名字
enum gpiod_flags flags); //GPIO方向和状态的标志,例如输入、输出、上拉、下拉
/* 返回一个指向 struct gpio_desc 的指针,表示获取的 GPIO 描述符 */
devm_gpiod_get_optional ->
devm_gpiod_get_index_optional -> //index为0
devm_gpiod_get_index ->
gpiod_get_index
int desc_to_gpio(const struct gpio_desc *desc)
struct gpio_desc *gpio_to_desc(unsigned gpio)
/* 旧的 GPIO 系统使用基于标号的结构而不是基于描述符。可以使用如下两个函数进行相互转换 */
硬件相关基础设定
(非半导体厂不用理会)
static void
edt_ft5x06_ts_set_regs(struct edt_ft5x06_ts_data *tsdata)
{
struct edt_reg_addr *reg_addr = &tsdata->reg_addr;
switch (tsdata->version) {
case EDT_M06:
reg_addr->reg_threshold = WORK_REGISTER_THRESHOLD;
reg_addr->reg_report_rate = WORK_REGISTER_REPORT_RATE;
reg_addr->reg_gain = WORK_REGISTER_GAIN;
reg_addr->reg_offset = WORK_REGISTER_OFFSET;
reg_addr->reg_num_x = WORK_REGISTER_NUM_X;
reg_addr->reg_num_y = WORK_REGISTER_NUM_Y;
break;
case EDT_M09:
case EDT_M12:
reg_addr->reg_threshold = M09_REGISTER_THRESHOLD;
reg_addr->reg_report_rate = NO_REGISTER;
reg_addr->reg_gain = M09_REGISTER_GAIN;
reg_addr->reg_offset = M09_REGISTER_OFFSET;
reg_addr->reg_num_x = M09_REGISTER_NUM_X;
reg_addr->reg_num_y = M09_REGISTER_NUM_Y;
break;
case GENERIC_FT:
/* this is a guesswork */
reg_addr->reg_threshold = M09_REGISTER_THRESHOLD;
reg_addr->reg_gain = M09_REGISTER_GAIN;
reg_addr->reg_offset = M09_REGISTER_OFFSET;
break;
}
}
IIC读取函数解析
static int
edt_ft5x06_ts_readwrite(struct i2c_client *client,
u16 wr_len, u8 *wr_buf,
u16 rd_len, u8 *rd_buf)
{
struct i2c_msg wrmsg[2];
int i = 0;
int ret;
if (wr_len) {
wrmsg[i].addr = client->addr; //I2C器件地址
wrmsg[i].flags = 0; //标记为发送
wrmsg[i].len = wr_len; //地址长度
wrmsg[i].buf = wr_buf; //要写的地址
i++; //写完用第二个缓存区去读数据
}
if (rd_len) {
wrmsg[i].addr = client->addr;
wrmsg[i].flags = I2C_M_RD; //标记为读数据
wrmsg[i].len = rd_len; //数据长度
wrmsg[i].buf = rd_buf; //用来装
读取的数据
i++;
}
ret = i2c_transfer(client->adapter, wrmsg, i);
if (ret < 0)
return ret;
if (ret != i)
return -EIO;
return 0;
}
/* 选择寄存器地址写入数据 */
static int edt_ft5x06_register_write(struct edt_ft5x06_ts_data *tsdata,
u8 addr, u8 value)
{
u8 wrbuf[4];
switch (tsdata->version) {
case EDT_M06:
wrbuf[0] = tsdata->factory_mode ? 0xf3 : 0xfc;
wrbuf[1] = tsdata->factory_mode ? addr & 0x7f : addr & 0x3f;
wrbuf[2] = value;
wrbuf[3] = wrbuf[0] ^ wrbuf[1] ^ wrbuf[2];
return edt_ft5x06_ts_readwrite(tsdata->client, 4,
wrbuf, 0, NULL);
case EDT_M09:
case EDT_M12:
case GENERIC_FT: //这个多正常啊,直接地址和数据解决
wrbuf[0] = addr;
wrbuf[1] = value;
return edt_ft5x06_ts_readwrite(tsdata->client, 2,
wrbuf, 0, NULL);
default:
return -EINVAL;
}
}
static int edt_ft5x06_register_read(struct edt_ft5x06_ts_data *tsdata,
u8 addr)
{
u8 wrbuf[2], rdbuf[2];
int error;
switch (tsdata->version) {
case EDT_M06:
wrbuf[0] = tsdata->factory_mode ? 0xf3 : 0xfc;
wrbuf[1] = tsdata->factory_mode ? addr & 0x7f : addr & 0x3f;
wrbuf[1] |= tsdata->factory_mode ? 0x80 : 0x40;
error = edt_ft5x06_ts_readwrite(tsdata->client, 2, wrbuf, 2,
rdbuf);
if (error)
return error;
if ((wrbuf[0] ^ wrbuf[1] ^ rdbuf[0]) != rdbuf[1]) {
dev_err(&tsdata->client->dev,
"crc error: 0x%02x expected, got 0x%02x\n",
wrbuf[0] ^ wrbuf[1] ^ rdbuf[0],
rdbuf[1]);
return -EIO;
}
break;
case EDT_M09:
case EDT_M12:
case GENERIC_FT: //直接地址过去,数据过来
wrbuf[0] = addr;
error = edt_ft5x06_ts_readwrite(tsdata->client, 1,
wrbuf, 1, rdbuf);
if (error)
return error;
break;
default:
return -EINVAL;
}
return rdbuf[0]; //返回读取到的数据
}
设备模型添加
/* 这部分注册了多个文件,用于读写对应寄存器的值,方便驱动调试和应用开发,非常精彩 */
static ssize_t edt_ft5x06_setting_show(struct device *dev,
struct device_attribute *dattr,
char *buf)
{
struct i2c_client *client = to_i2c_client(dev);
struct edt_ft5x06_ts_data *tsdata = i2c_get_clientdata(client);
struct edt_ft5x06_attribute *attr =
container_of(dattr, struct edt_ft5x06_attribute, dattr);
u8 *field = (u8 *)tsdata + attr->field_offset;
int val;
size_t count = 0;
int error = 0;
u8 addr;
mutex_lock(&tsdata->mutex);
if (tsdata->factory_mode) {
error = -EIO;
goto out;
}
switch (tsdata->version) {
case EDT_M06:
addr = attr->addr_m06;
break;
case EDT_M09:
case EDT_M12:
case GENERIC_FT:
addr = attr->addr_m09;
break;
default:
error = -ENODEV;
goto out;
}
if (addr != NO_REGISTER) {
val = edt_ft5x06_register_read(tsdata, addr);
if (val < 0) {
error = val;
dev_err(&tsdata->client->dev,
"Failed to fetch attribute %s, error %d\n",
dattr->attr.name, error);
goto out;
}
} else
val = *field;
if (val != *field) {
dev_warn(&tsdata->client->dev,
"%s: read (%d) and stored value (%d) differ\n",
dattr->attr.name, val, *field);
*field = val;
}
count = scnprintf(buf, PAGE_SIZE, "%d\n", val);
out:
mutex_unlock(&tsdata->mutex);
return error ?: count;
}
static ssize_t edt_ft5x06_setting_store(struct device *dev,
struct device_attribute *dattr,
const char *buf, size_t count)
{
struct i2c_client *client = to_i2c_client(dev);
struct edt_ft5x06_ts_data *tsdata = i2c_get_clientdata(client);
struct edt_ft5x06_attribute *attr =
container_of(dattr, struct edt_ft5x06_attribute, dattr);
u8 *field = (u8 *)tsdata + attr->field_offset;
unsigned int val;
int error;
u8 addr;
mutex_lock(&tsdata->mutex);
if (tsdata->factory_mode) {
error = -EIO;
goto out;
}
error = kstrtouint(buf, 0, &val);
if (error)
goto out;
if (val < attr->limit_low || val > attr->limit_high) {
error = -ERANGE;
goto out;
}
switch (tsdata->version) {
case EDT_M06:
addr = attr->addr_m06;
break;
case EDT_M09:
case EDT_M12:
case GENERIC_FT:
addr = attr->addr_m09;
break;
default:
error = -ENODEV;
goto out;
}
if (addr != NO_REGISTER) {
error = edt_ft5x06_register_write(tsdata, addr, val);
if (error) {
dev_err(&tsdata->client->dev,
"Failed to update attribute %s, error: %d\n",
dattr->attr.name, error);
goto out;
}
}
*field = val;
out:
mutex_unlock(&tsdata->mutex);
return error ?: count;
}
struct edt_ft5x06_attribute {
struct device_attribute dattr;
size_t field_offset;
u8 limit_low;
u8 limit_high;
u8 addr_m06;
u8 addr_m09;
};
#define EDT_ATTR(_field, _mode, _addr_m06, _addr_m09, \
_limit_low, _limit_high) \
struct edt_ft5x06_attribute edt_ft5x06_attr_##_field = { \
.dattr = __ATTR(_field, _mode, \
edt_ft5x06_setting_show, \
edt_ft5x06_setting_store), \
.field_offset = offsetof(struct edt_ft5x06_ts_data, _field), \
.addr_m06 = _addr_m06, \
.addr_m09 = _addr_m09, \
.limit_low = _limit_low, \
.limit_high = _limit_high, \
}
/* m06, m09: range 0-31, m12: range 0-5 */
static EDT_ATTR(gain, S_IWUSR | S_IRUGO, WORK_REGISTER_GAIN,
M09_REGISTER_GAIN, 0, 31);
/* m06, m09: range 0-31, m12: range 0-16 */
static EDT_ATTR(offset, S_IWUSR | S_IRUGO, WORK_REGISTER_OFFSET,
M09_REGISTER_OFFSET, 0, 31);
/* m06: range 20 to 80, m09: range 0 to 30, m12: range 1 to 255... */
static EDT_ATTR(threshold, S_IWUSR | S_IRUGO, WORK_REGISTER_THRESHOLD,
M09_REGISTER_THRESHOLD, 0, 255);
/* m06: range 3 to 14, m12: (0x64: 100Hz) */
static EDT_ATTR(report_rate, S_IWUSR | S_IRUGO, WORK_REGISTER_REPORT_RATE,
NO_REGISTER, 0, 255);
static struct attribute *edt_ft5x06_attrs[] = {
&edt_ft5x06_attr_gain.dattr.attr,
&edt_ft5x06_attr_offset.dattr.attr,
&edt_ft5x06_attr_threshold.dattr.attr,
&edt_ft5x06_attr_report_rate.dattr.attr,
NULL
};
static const struct attribute_group edt_ft5x06_attr_group = {
.attrs = edt_ft5x06_attrs,
};
中断服务函数
static irqreturn_t edt_ft5x06_ts_isr(int irq, void *dev_id)
{
struct edt_ft5x06_ts_data *tsdata = dev_id;
struct device *dev = &tsdata->client->dev;
u8 cmd;
u8 rdbuf[63];
int i, type, x, y, id;
int offset, tplen, datalen, crclen;
int error;
switch (tsdata->version) {
case EDT_M06:
cmd = 0xf9; /* tell the controller to send touch data */
offset = 5; /* where the actual touch data starts */
tplen = 4; /* data comes in so called frames */
crclen = 1; /* length of the crc data */
break;
case EDT_M09:
case EDT_M12:
case GENERIC_FT:
cmd = 0x0; //请求发送触点数据
offset = 3; //偏移1位,也就是从 0x00+3开始是触摸值
tplen = 6; //一个触点有6个寄存器来保存触摸值
crclen = 0; //不校验
break;
default:
goto out;
}
memset(rdbuf, 0, sizeof(rdbuf));
datalen = tplen * tsdata->max_support_points + offset + crclen; //一帧数据的长度
/*读取 cmd 返回的数据 */
error = edt_ft5x06_ts_readwrite(tsdata->client,
sizeof(cmd), &cmd,
datalen, rdbuf);
if (error) {
dev_err_ratelimited(dev, "Unable to fetch data, error: %d\n",
error);
goto out;
}
/* M09/M12 does not send header or CRC */
if (tsdata->version == EDT_M06) {
if (rdbuf[0] != 0xaa || rdbuf[1] != 0xaa ||
rdbuf[2] != datalen) {
dev_err_ratelimited(dev,
"Unexpected header: %02x%02x%02x!\n",
rdbuf[0], rdbuf[1], rdbuf[2]);
goto out;
}
if (!edt_ft5x06_ts_check_crc(tsdata, rdbuf, datalen))
goto out;
}
/*处理多个点的数据 */
for (i = 0; i < tsdata->max_support_points; i++) {
u8 *buf = &rdbuf[i * tplen + offset];
bool down;
type = buf[0] >> 6; //先获取触摸类型
/* ignore Reserved events */
if (type == TOUCH_EVENT_RESERVED) //没意义的直接不理
continue;
/* M06 sometimes sends bogus coordinates in TOUCH_DOWN */
if (tsdata->version == EDT_M06 && type == TOUCH_EVENT_DOWN)
continue;
//buf:[i * tplen + offset],需要结合帧数据格式分析
x = ((buf[0] << 8) | buf[1]) & 0x0fff; //x坐标,只要前3个字节,4个位左移8位会变成12个位
y = ((buf[2] << 8) | buf[3]) & 0x0fff; //y坐标,只要前3个字节,同理
id = (buf[2] >> 4) & 0x0f; //触点id值,只要一个字节,这么,只要一个数字而已
down = type != TOUCH_EVENT_UP;
/*此函数用于 Type B 类型,此函数用于产生 ABS_MT_SLOT 事件,告诉内核当前上报的是哪个触摸点的坐标数据
slot:当前发送的是哪个 slot 的坐标信息,也就是哪个触摸点
*/
input_mt_slot(tsdata->input, id);
/*此函数用于 Type B 类型,用于产生 ABS_MT_TRACKING_ID 和 ABS_MT_TOOL_TYPE 事件, ABS_MT_TRACKING_ID 事 件 给 slot 关联一个 ABS_MT_TRACKING_ID ,
ABS_MT_TOOL_TYPE 事件指定触摸类型(可以选择 MT_TOOL_FINGER(手指)、MT_TOOL_PEN(笔)或MT_TOOL_PALM(手掌),对于多点电容触摸屏来说一般都是手指)
active:true,连续触摸,input 子系统内核会自动分配一个 ABS_MT_TRACKING_ID 给 slot。
false,触摸点抬起,表示某个触摸点无效了,input 子系统内核会分配一个-1 给 slot,表示触摸
点溢出。
*/
input_mt_report_slot_state(tsdata->input, MT_TOOL_FINGER, down);
if (!down)
continue;
/* 坐标上报函数,可以直接调用input_report_abs进行更灵活的上报 */
touchscreen_report_pos(tsdata->input, &tsdata->prop, x, y,
true);
}
/*如果追踪到的触摸点数量多于当前上报的数量,驱动程序使用 BTN_TOOL_TAP 事件来通
知用户空间当前追踪到的触摸点总数量,然后调用 input_mt_report_pointer_emulation 函数将
use_count 参数设置为 false。否则将 use_count 参数设置为 true,表示当前的触摸点数量有效。
*/
input_mt_report_pointer_emulation(tsdata->input, true);
input_sync(tsdata->input); //同步信号
out:
return IRQ_HANDLED;
}
关于上面为什么 x、y 坐标是三个字节?
数据手册中已经给出了答案,从 0x03到0x04两个地址中的数据共16位,其中 [11:0] 12位是第一个触点的 X 坐标。其他的同理。
然后为什么要移8个位呢?因为实际数据只有一个字节,要凑3个字节,当然,和控制器的读写顺序有关,这部分就不是我们非原厂驱动工程师该管的了。

总结
- 注册 i2c_driver
- probe中:
a. 硬件初始化
b. 设置中断和中断服务函数
c. 创建设备模型和属性
d. 注册 input 设备:input_register_device() - 编写中断服务函数
a. 使用IIC协议去读取从机的数据
b. 上报输入事件和数据

我们需要实现的是设备树、i2c_client、i2c_driver、input_dev。
本驱动相对于原版驱动的改动
注意:右边是原版

增加了几个固件版本,M06是很难用的一个版本;如果没有要求兼容多个固件版本,直接去掉版本兼容相关的程序,实际功能并不会收到影响。

增加触屏设备文件属性

M09、M12、通用版本采用相同的触点上报规则
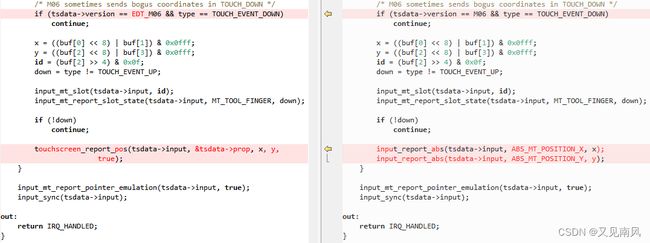
两个函数都是上报坐标信息,但是原版显然更灵活

EDT_ATTR() 用于声明属性文件结构体,参数从左到右分别是:field、_mode、_addr_m06、_addr_m09、limit_low、limit_high
用于查询设备数据偏移量、工作模式、固件版本、阈值限制


版本控制,没什么好说的

没预设数据就从设备里面请求
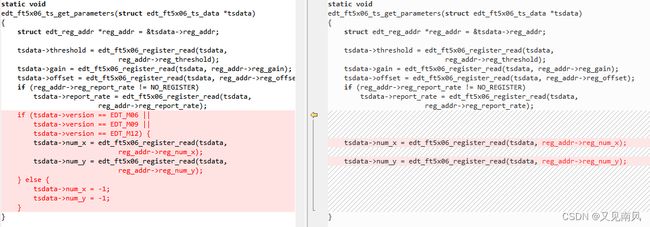
获取 x、y 的最大值,也就是屏幕大小

设置触摸屏设备中的寄存器地址,后期通过I2C从这些地址中获取数据
probe :
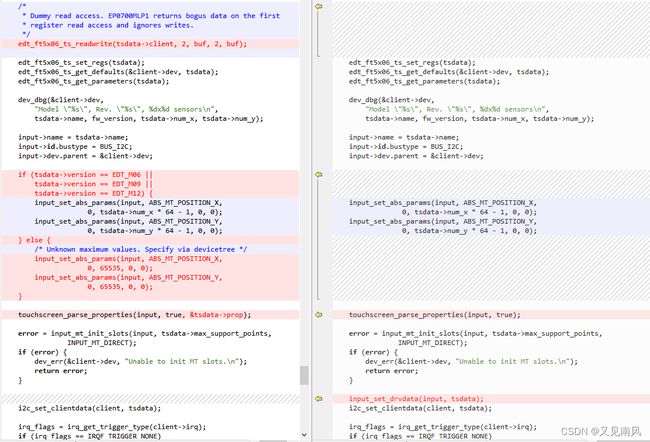
input_set_abs_params 将设备树上的屏幕尺寸设置给了输入设备。
原驱动中因为没有固定哪个版本的芯片,所以没有指定特定的输入设备数据,移植驱动时需要添加必要的输入设备数据。
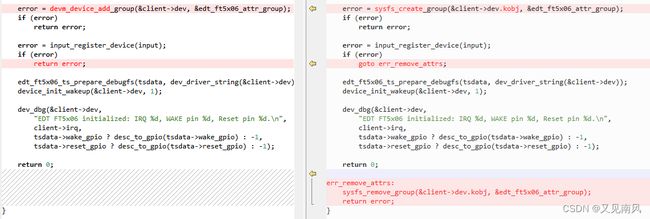
本质上没有区别,使用 devm 前缀的API申请资源会在设备被卸载时自动清理。

使用 devm 前缀的API申请资源不需要释放。

修改最大触点支持、传统设备匹配方法、设备匹配方法。
将驱动添加到内核
将驱动添加到内核,系统启动时就会自动挂载,不需要再手动挂载了。
- 将驱动文件放到合适的位置
ft5x06.c 是个触摸屏驱动,linux 内核里将触摸屏驱动放到了 drivers/input/touchscreen 目录下,因此将 ft5x06.c 也拷贝到此目录下。 - 修改Makefile
修改 drivers/input/touchscreen 目录下的 Makefile,在最下面添加一行:
obj-y += ft5x06.o
这样就将驱动文件添加进了内核编译。修改完成以后重新编译 linux 内核,然后用新的 uImage 启动开发板。如果驱动添加成功,系统启动的时候就会输出下图信息:

tslib 移植与使用
tslib 是一个开源的第三方库,用于触摸屏性能调试,使用电阻屏的时候一般使用 tslib 进行校准。虽然电容屏不需要校准,但是由于电容屏加工的原因,有的时候其不一定精准,因此有时候也需要进行校准。
移植部分在之前的《input 子系统理论与实例分析》中有链接。
在 buildroot 的 menuconfig 中使能 tslib 库:
->Target packages
->Libraries
->Hardware handling
->[*]tslib
然后使用sudo make编译出文件系统,并解压到 nfs 的对应目录即可。
使用内核自带的驱动
内核自带的 FT5426 的驱动文件为 drivers/input/touchscreen/edt-ft5x06.c,此驱动文件不仅能够驱动 FT5426,FT5206、FT5406 这些都可以驱动。
先将之前添加进内核编译的自己的驱动去除,将Makefile中添加的命令去掉即可。
- 使能内核自带的 FT5X06 驱动
在 Linux 内核的 menuconfig 进行使能:

- 修改设备树
修改之前编写的 ft5426 设备节点,添加 compatible 属性。edt-ft5x06.c 所支持的 compatible 属性列表如下:
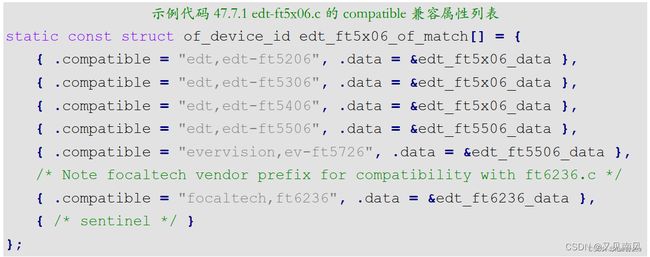
将 compatible 属性修改为某一个兼容值即可。
ft5426: ft5426@38 {
status = "okay";
compatible = "edt,edt-ft5306"; //驱动匹配名
reg = <0x38>; //IIC从机地址
touch-gpio = <&gpio3 RK_PA5 IRQ_TYPE_EDGE_RISING>;
interrupt-parent = <&gpio3>;
interrupts = <RK_PA5 IRQ_TYPE_LEVEL_LOW>; //中断信号输入管脚为GPIO3的A5
reset-gpio = <&gpio0 RK_PB6 GPIO_ACTIVE_LOW>; //复位输出管脚为GPIO0的B6
touchscreen-size-x = <800>;
touchscreen-size-y = <1280>;
touch_type = <1>;
};
其他参考资料
某个课程设计:https://blog.csdn.net/zhoyixing/article/details/9380377
正点原子触摸屏驱动的讲解:http://www.taodudu.cc/news/show-5456347.html?action=onClick
https://it.cha138.com/shida/show-460929.html
https://blog.51cto.com/u_15688123/5870443