2023E题控制题电赛报告(附控制题电赛报告写作要求)
完整报告内容:
运动目标控制与自动追踪系统
摘要:本“运动目标控制与自动追踪系统”以MSP432P401R为控制核心,OpenMV作为视觉系统主要元件来实现对摄像头中出现的红色激光、绿色激光、屏幕边线、黑色胶带进行识别并处理,将处理结果发送给MSP432P401R控制核心。在本系统中采用两块MSP432P401R控制核心,分别控制一台二维电控云台。第一台云台上安装红色激光笔,主控根据接收到的屏幕边线的坐标信息控制电控云台带动红色激光在屏幕边线上进行移动。第二台云台上安装绿色激光笔,主控根据接收到的红色激光的坐标位置控制电控云台带动绿色激光进行追踪。在该系统中采用增量式PID算法对坐标信息进行处理,减少目标位置与实际位置的误差,以此对云台进行控制,使得运动目标控制与自动追踪功能更加稳定。
关键词:运动目标控制与自动追踪系统;MSP432P401R;OpenMV;PID算法;
1. 系统方案设计与论证
本系统主要由电源模块、总控制模块、OpenMV识别模块、二维电控云台组成,其系统框图如下图所示 :

图1.1 系统框图
1.1控制系统的方案论证与选择
方案一: MSP430G2553是一款低功耗的8位微控制器,具有PWM输出通道、UART接口和足够的GPIO引脚,可以与驱动器、传感器以及其他外设进行通信。但该控制器的处理能力和存储容量相对于其他16位微控制器较低,可能无法胜任复杂功能。
方案二: MSP430F5529是一款低功耗、高性能的16位微控制器,频率可以达到25MHz。片上资源较为丰富,包括多个定时器/计数器,模拟数字转换器,PWM输出和多个GPIO引脚等,能够应对云台的驱动与控制,适合中等复杂度的系统制作。
方案三:MSP432P401R采用了Cortex-M4F内核,是一款高性能的32位微控制器,具有较高的处理能力和运算速度。它采用了MSP系列的低功耗技术,具有出色的功耗特性,支持多种低功耗模式,同时也具备丰富的外设、大容量的存储器以及更高的计算能力,足以应对需要较强处理能力和复杂功能的系统制作。
综合以上三种方案,由于“追踪目标控制与自动追踪系统”对实时性具有较高的要求,需要快速制动二维电控云台,算法相对复杂。所以需要选择运算速度快,内存空间丰富的单片机作为控制器。按照本次赛题要求,控制系统芯片选用方案三MSP432P401R作为主控芯片控制二维电控云台的运动。
1.2红、绿色激光及屏幕边线识别的方案论证与选择
方案一: OpenMV4 Plus是一款嵌入式视觉控制器,具有内置摄像头和丰富的图像处理功能,参数易于调整,模板易于获得初步处理。但其模板易受到复杂环境与倾角干扰,基础镜头视觉窄,处理复杂图像和算法能力有限。
方案二: 树莓派4B具有较高的处理器主频以及较大的内存,具备强大的计算机能力和图像处理性能,适合进行复杂的图像识别任务。其相对于其他平台的配置和调试过程较为繁琐,且功耗较高。
方案三:K210能在较高帧率下进行图像识别,该方案需要一定数量的数据集来对模型进行反复训练与测试。然而,网上现存的数据集难以实现,需要人为制造一些富有特征的数据并对其进行数据增强与打标签。此外,该方案需要对模型具有较高的内存空间要求,因此需要注意模型压缩问题。
综合以上三种方案,考虑到环境情况、图像识别精度与帧率的平衡,我们选择使用第一种方案,采用OpenMV进行目标识别。
1.3 舵机控制模块论证与选择
方案一: SG90是一款小巧轻便的舵机,成本低,但由于其采用塑料减速齿轮容易受损,扭矩和精度较小,承载能力有限。
方案二: MG90是SG90舵机的升级版,采用金属齿轮且扭矩更大,但精度一般,位置控制和角度控制有一定的误差。
方案三: MG995舵机具有较高的力矩,承载能力强,响应迅速,适合于快速动作和控制。
综合以上三种方案,选择方案三MG995舵机。
2.理论分析与计算
2.1运动目标控制分析
由于题目要求运动目标控制系统具有回到原点、在屏幕边线和黑胶带上移动、暂停运动的功能,需要具备启动、复位、立即制动、识别信息处理的能力。因此运动目标控制系统需要用到两个按键中断,分别控制系统进行回到屏幕中心、停止运动的功能。同时在系统中不断地对串口接收到的信息进行处理,提取屏幕边线或黑色胶带的四个边角的坐标位置,并计算得到屏幕的中心位置坐标。主控根据接收和计算得到的坐标,采用增量式PID算法,控制两路PWM的输出进而控制二维电控云台带动红色激光移动,使其能够回到屏幕中心位置和屏幕边线上进行移动。
由于OpenMV识别矩形边角坐标有些许误差,因此采用平均法计算得到屏幕中心位置坐标。假设获取到的矩形边角坐标为{x1,y1}、{x2,y2}、{x3,y3}、{x4,y4}如图2.1所示,则屏幕中心位置坐标为{(x2-x1+x4-x3)/2,(y4-y2+y3-y1)/2}。
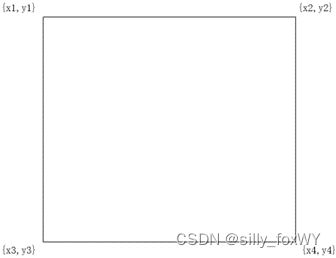
图2.1 矩形边角坐标获取示意图
2.2追踪目标性能分析
当自动追踪系统使用按键启动后,该系统上的OpenMV将识别红色激光的坐标并发送给MSP432P401R主控,主控根据接收到的坐标控制二维云台带动绿色激光进行追踪移动。主控中采用两个按键中断,分别控制系统启动和停止运动的功能。
由于当红色激光和绿色激光进行重合时,会对OpenMV带摄像头识别模块造成干扰,因此当识别到红色激光坐标时,主控控制云台带动绿色激光移动到距离红色激光2cm左右的位置进行追踪,避免干扰。当主控未接收到红色激光坐标时,视绿色激光已经与红色激光进行了重合,此时将绿色激光向周围移动1cm左右的距离。
2.3 OpenMV识别分析
对于屏幕的边线识别,采用OpenMV矩形识别的方式,使用Sensor模块中的snapshot()函数获取摄像头的实时图像帧。之后对图像进行灰度转化和二值化处理,使用图像分析库在图像中查找矩形,并获取矩形的位置和尺寸信息,计算得出矩形四个边角的坐标,将数据发送给运动目标控制系统主控。
识别黑胶带采用色块识别的方式,在代码中设置黑色颜色的阈值,将实时获取到的图像进行颜色过滤并在图像中绘制识别到的色块,获取色块的尺寸大小及位置信息,计算得到该色块的坐标并将其发送给自动追踪系统的主控。
3.电路与程序设计
3.1电路设计
为了使系统的集成度更高,同时使系统能够具备一定的可扩展性,因此在本次“运动目标控制与自动追踪系统”设计中,我们设计并制作了一块PCB将电源模块、降压模块、OLED显示模块、蜂鸣器电路集成在一起,同时将MSP432P401R多余的GPIO口引出,方便进行一些功能扩展。电路的总体设计如下:
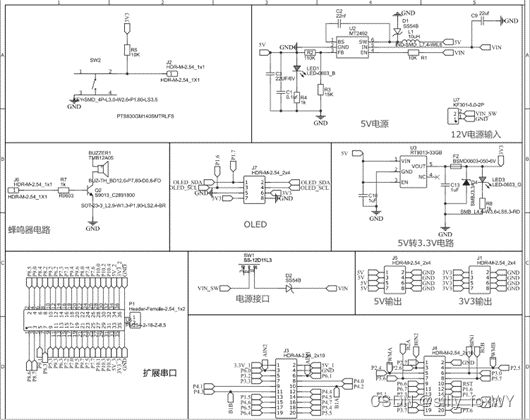
图3.1 系统总电路设计
3.1.1系统电源电路
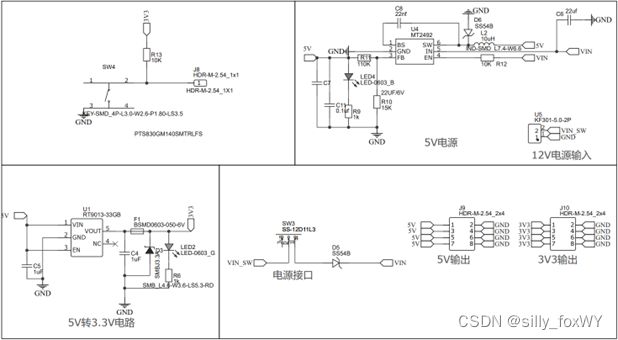
图3.1.1 系统电源电路
3.1.2系统蜂鸣器电路

图3.1.2 系统蜂鸣器电路
3.2程序设计
3.2.1程序功能描述
运动目标控制系统具有两种功能模式,由按键控制切换。
模式一:按下按键后,云台将带动红色激光到达屏幕中心位置。
模式二:按下按键后,主控将停止接收信息的处理和对云台的控制,以此固定云台带动的红色激光位置。
自动追踪控制系统具有两种功能模式,由按键控制切换。
模式一:一键启动系统开始识别追踪功能,按键按下后该系统将识别红色激光的位置,并根据位置的坐标进行追踪。
模式二:按下按键后,主控将停止接收信息的处理和对云台的控制,以此固定云台带动的绿色激光位置。
3.2.2程序流程图
(1) 运动控制系统流程图

图3.2.1 运动控制系统流程图
(2) 自动追踪系统流程图

图3.2.2 自动追踪系统流程图
4测试方案与测试结果
4.1测试方法
对运动控制系统和自动追踪系统分别单独测试,并对其程序进行分块测试。
4.1.1运动控制系统测试
(1)复位功能测试:测试按键复位后系统中的云台是否能够带动红色激光到达屏幕中心位置,并多次进行移动云台后按键复位,记录每次复位后与屏幕中心距离的误差,根据记录的误差情况在代码中进行参数调整,直到误差小于2cm。
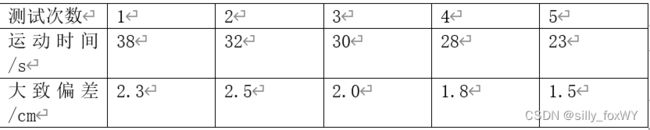
(2)运动控制测试:系统复位后一段时间系统应当开始运动,主控根据识别模块识别到的屏幕边线坐标控制云台带动红色激光进行边线循迹运动,根据红色激光与边线的距离误差在代码中进行参数调整,并根据循迹完一圈后的时间控制云台的移动速度。
(3)黑胶带巡线运动:测试方法同运动控制测试,黑胶带为优先循迹对象,主控将首先对黑胶带的位置信息进行处理,使红色激光能够沿黑色激光循迹。
(4)停止功能测试:使系统进行循迹运动,在运动过程中按下停止按键,测试系统是否能够立即停止运动并维持红色激光在按下按键瞬间的运动位置。
4.1.2自动追踪系统测试
(1)追踪功能测试:首先让运动目标控制系统复位在屏幕中心,开启自动追踪系统,测试绿色激光是否能够追踪到红色激光附近位置,记录误差并调整设置参数。
(2)停止功能测试:使系统进行红色激光追踪运动,在运动过程中按下停止按键,测试系统是否能够立即停止运动并维持绿色激光在按下按键瞬间的运动位置。
4.2测试结果
4.2.1基本要求测试
(1)基础部分1测试:按键复位功能测试
表4-1 基础部分1测试

(2)基础部分2测试:屏幕边线循迹测试
表4-2 基础部分2测试
(3)基础部分3测试:黑胶带循迹测试
表4-3 基础部分3测试

4.2.2发挥部分测试
(1)发挥部分1测试:追踪测试
表4-4 发挥部分1测试
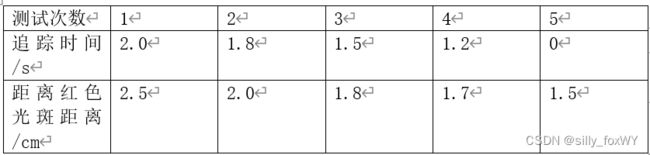
(2)发挥部分2测试:自动追踪测试
表4-5 发挥部分2测试

(3)发挥部分3测试:停止运动测试
表4-6 发挥部分3测试

4.3测试结果分析
在本次测试中,主要对系统的稳定性进行了优化,对系统所使用的PID参数进行了调整。在不断的测试调试中,系统的循迹运动和追踪运动更加稳定、准确,减少了许多外界因素造成的干扰。最终,该运动目标控制与自动追踪系统完成了题目要求的全部功能。
5.参考文献
[1] 全国大学生电子设计竞赛组委会.2011年全国大学生电子设计竞赛获奖作品选编[M].北京:北京理工大学出版社,2012
[2] 沈建华,杨艳琴,MSP430超低功耗单片机原理与应用[M].北京:清华大学出版社,2013
[3] 胡寿松.自动控制原理[M].6版.北京:科学出版社,2013
[4] 李志明.STM32嵌入式系统开发实战指南[M].北京:机械工业出版社,2013
[5] 童诗白,华成英.模拟电子技术基础[M].4版.北京:高等教育出版社,2009
[6] 张友德,赵志英,涂时亮.单片机微型机原理,应用与实践[M].5版.上海:复旦大学 出版社,2009
由于word和pdf文档所写的电赛报告有更为严格的格式要求,需要源文件的自取:
2023e题电赛报告源文件
在以下文章中,详细记录了电赛报告的内容要求,格式要求,命名要求等。
控制题电赛报告的完整书写要求