【正点原子STM32连载】第四十六章 摄像头实验 摘自【正点原子】APM32F407最小系统板使用指南
1)实验平台:正点原子stm32f103战舰开发板V4
2)平台购买地址:https://detail.tmall.com/item.htm?id=609294757420
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/thread-340252-1-1.html##
第四十六章 摄像头实验
本章将介绍使用APM32F407驱动OV2640摄像头,从而获取摄像头输出的图像数据,并将其显示在LCD上,也可通过串口发送至PC上位机软件。通过本章的学习,读者将学习到数字摄像头接口(DCI)的使用。
本章分为如下几个小节:
46.1 硬件设计
46.2 程序设计
46.3 下载验证
46.1 硬件设计
46.1.1 例程功能
- 程序运行后,可通过按下KEY0按键进入RGB565模式测试,也可按下KEY_UP按键进入JPEG模式测试
- RGB565模式测试将采集到的摄像头数据在LCD上进行显示,可通过按下KEY0和KEY_UP按键,分别进行对比度和缩放的设置
- JPEG模式测试将采集到的摄像头数据通过USART2发送至上位机软件(ATK-XCAM),可通过按下KEY0和KEY_UP按键,分别进行对比度和图像尺寸的设置
- 通过USMART调用程序中的函数,实现对LCD、LED和延时操作
- 可通过USMART对ATK-MC2640等进行配置
- LED1闪烁,提示DCI捕获到一帧数据
46.1.2 硬件资源 - LED
LED0 - PF9
LED1 - PF10 - 按键
KEY0 - PE4
KEY_UP - PA0 - USART1(PA9、PA10连接至板载USB转串口芯片上)
- 正点原子 2.8/3.5/4.3/7/10寸TFTLCD模块(仅限MCU屏,16位8080并口驱动)
- USART2(用于上传JPEG数据至上位机)
USART2_TX - PA2 - TMR6(同于统计并打印摄像头的帧率信息)
- ATK-MC2640摄像头模块
OV_D0~D7 - PC6/PC7/PC8/PC9/PC11/PB6/PE5/PE6
OV_SCL - PD6
OV_SDA - PD7
OV_VSYNC - PB7
OV_HREF - PA4
OV_PCLK - PA6
OV_PWDN - PG9
OV_RESET - PG15
OV_XCLK - PA8
46.1.3 原理图
本章实验使用了一个正点原子OV2640摄像头模块(ATK-MC2640),该模块需通过摄像头模块延长线与板载的CAMERA接口进行连接,该接口也可与OLED模块进行连接,该接口与板载MCU的连接原理图,如下图所示:
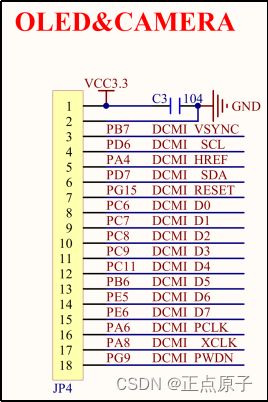
图46.1.3.1 摄像头模块与MCU的连接原理图
46.2 程序设计
46.2.1 Geehy标准库的DCI驱动
本章使用通过DCI驱动摄像头模块,并获取摄像头模块返回的图像数据,分为RGB565模式和JPEG模式,其中RGB565模式直接将摄像头返回的数据流通过DMA传输至LCD,JPEG模式下将整帧的JPEG图像数据通过USART2传输至PC上位机软件,因为需要获取JPEG整帧的数据,因此JPEG模式下需要使用到DCI的捕获完成中断,其具体的步骤如下:
①:配置DCI
②:对于JPEG模式,需要使能DCI的捕获完成中断
③:对于JPEG模式,需要使能DCI中断,并配置其相关的中断优先级
④:使能DCI
⑤:使能DCI捕获
⑥:对于JPEG模式,需要读取DCI的捕获完成中断标志
⑦:对于JPEG模式,需要清除DCI的捕获完成中断标志
在Geehy标准库中对应的驱动函数如下:
①:配置DCI
该函数用于配置DCI的各项参数,其函数原型如下所示:
void DCI_Config(DCI_Config_T* dciConfig);
该函数的形参描述,如下表所示:
形参 描述
dciConfig 指向DCI配置结构体的指针
需自行定义,并根据DCI的配置参数填充结构体中的成员变量
表46.2.1.1 函数DCI_Config()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
无 无
表46.2.1.2 函数DCI_Config()返回值描述
该函数使用DCI_Config_T类型的结构体变量传入DCI的配置参数,该结构体的定义如下所示:
typedef enum
{
DCI_CAPTURE_MODE_CONTINUOUS, /* 连续采集模式 */
DCI_CAPTURE_MODE_SNAPSHOT /* 快照模式 */
} DCI_CAPTURE_MODE_T;
typedef enum
{
DCI_SYNCHRO_MODE_HARDWARE, /* 硬件同步 */
DCI_SYNCHRO_MODE_EMBEDDED /* 内嵌码同步 */
} DCI_SYNCHRO_MODEVAL_T;
typedef enum
{
DCI_PCK_POL_FALLING, /* 上升沿捕获 */
DCI_PCK_POL_RISING /* 下降沿捕获 */
} DCI_PCK_POL_T;
typedef enum
{
DCI_VSYNC_POL_LOW, /* 低电平有效 */
DCI_VSYNC_POL_HIGH /* 高电平有效 */
} DCI_VSYNC_POL_T;
typedef enum
{
DCI_HSYNC_POL_LOW, /* 低电平有效 */
DCI_HSYNC_POL_HIGH /* 高电平有效 */
} DCI_HSYNC_POL_T;
typedef enum
{
DCI_CAPTURE_RATE_ALL_FRAME, /* 捕获所有帧 */
DCI_CAPTURE_RATE_1OF2_FRAME, /* 隔一个帧捕获一次 */
DCI_CAPTURE_RATE_1OF4_FRAME /* 隔三个帧捕获一次 */
} DCI_CAPTURE_RATE_T;
typedef enum
{
DCI_EXTENDED_DATA_MODE_8B, /* 8位数据宽度 */
DCI_EXTENDED_DATA_MODE_10B, /* 10位数据宽度 */
DCI_EXTENDED_DATA_MODE_12B, /* 12位数据宽度 */
DCI_EXTENDED_DATA_MODE_14B /* 14位数据宽度 */
} DCI_EXTENDED_DATA_MODE_T;
typedef struct
{
DCI_CAPTURE_MODE_T captureMode; /* 捕获模式 */
DCI_SYNCHRO_MODEVAL_T synchroMode; /* 同步模式 */
DCI_PCK_POL_T pckPolarity; /* 像素时钟极性 */
DCI_VSYNC_POL_T vsyncPolarity; /* 垂直同步极性 */
DCI_HSYNC_POL_T hsyncPolarity; /* 水平同步极性 */
DCI_CAPTURE_RATE_T capturerate; /* 帧捕获频率 */
DCI_EXTENDED_DATA_MODE_T extendedDataMode; /* 数据宽度 */
} DCI_Config_T;
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_dci.h"
void example_fun(void)
{
DCI_Config_T dci_init_struct;
/* 配置DCI */
dci_init_struct.captureMode = DCI_CAPTURE_MODE_CONTINUOUS;
dci_init_struct.synchroMode = DCI_SYNCHRO_MODE_HARDWARE;
dci_init_struct.pckPolarity = DCI_PCK_POL_RISING;
dci_init_struct.vsyncPolarity = DCI_VSYNC_POL_LOW;
dci_init_struct.hsyncPolarity = DCI_HSYNC_POL_LOW;
dci_init_struct.capturerate = DCI_CAPTURE_RATE_ALL_FRAME;
dci_init_struct.extendedDataMode = DCI_EXTENDED_DATA_MODE_8B;
DCI_Config(&dci_init_struct);
}
②:使能DCI的指定中断
该函数用于使能DCI的指定中断,其函数原型如下所示:
void DCI_EnableInterrupt(uint32_t interrupt);
该函数的形参描述,如下表所示:
形参 描述
interrupt 指定DCI的中断
例如:DCI_INT_CC、DCI_INT_OVR等(在apm32f4xx_dci.h文件中有定义)
表46.2.1.3 函数DCI_EnableInterrupt()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
无 无
表46.2.1.4 函数DCI_EnableInterrupt()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_dci.h"
void example_fun(void)
{
/* 使能DCI捕获完成中断 */
DCI_EnableInterrupt(DCI_INT_CC);
}
③:配置DCI中断
请见第12.2.3小节中配置中断的相关内容。
④:使能DCI
该函数用于使能DCI,其函数原型如下所示:
void DCI_Enable(void);
该函数的形参描述,如下表所示:
形参 描述
无 无
表46.2.1.5 函数DCI_Enable()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
无 无
表46.2.1.6 函数DCI_Enable()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_dci.h"
void example_fun(void)
{
/* 使能DCI */
DCI_Enable();
}
⑤:使能DCI捕获
该函数用于使能DCI捕获,其函数原型如下所示:
void DCI_EnableCapture(void);
该函数的形参描述,如下表所示:
形参 描述
无 无
表46.2.1.7 函数DCI_EnableCapture()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
无 无
表46.2.1.8 函数DCI_EnableCapture()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_dci.h"
void example_fun(void)
{
/* 使能DCI捕获 */
DCI_EnableCapture();
}
⑥:读取DCI指定中断标志
该函数用于读取DCI的指定中断标志,其函数原型如下所示:
uint16_t DCI_ReadIntFlag(DCI_INT_T flag);
该函数的形参描述,如下表所示:
形参 描述
flag 指定DCI的中断标志
例如:DCI_INT_CC、DCI_INT_OVR等(在apm32f4xx_dci.h文件中有定义)
表46.2.1.9 函数DCI_ReadIntFlag()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
SET 中断标志发生
RESET 中断标志未发生
表46.2.1.10 函数DCI_ReadIntFlag()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_dci.h"
void example_fun(void)
{
uint8_t flag;
/* 获取DCI的捕获完成中断标志 */
flag = DCI_ReadIntFlag(DCI_INT_CC);
if (flag == SET)
{
/* Do something. */
}
else
{
/* Do something. */
}
}
⑦:清除DCI指定中断标志
该函数用于清除DCI的指定中断标志,其函数原型如下所示:
void DCI_ClearIntFlag(uint16_t flag);
该函数的形参描述,如下表所示:
形参 描述
flag 指定DCI的中断标志
例如:DCI_INT_CC、DCI_INT_OVR等(在apm32f4xx_dci.h文件中有定义)
表46.2.1.11 函数DCI_CleatIntFlag()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
无 无
表46.2.1.12 函数DCI_ClearIntFlag()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_dci.h"
void example_fun(void)
{
/* 清除DCI的捕获完成中断标志 */
DCI_ClearIntFlag(DCI_INT_CC);
}
46.2.2 DCI驱动代码
本章实验的DCI驱动主要负责向应用层提供DCI的初始化和启动DCI传输等函数。本章实验中,DCI的驱动代码包括dci.c和dci.h两个文件。
由于DCI使用了大量的GPIO引脚,因此对于GPIO的相关定义,请读者自行查看dci.c这个文件。
DCI驱动中,DCI的初始化函数,如下所示:
/**
* @brief 初始化DCI
* @note 引脚对应关系如下:
* 摄像头模块 ------------ APM32F407最小系统板
* OV_D0~D7 ------------ PC6/PC7/PC8/PC9/PC11/PB6/PE5/PE6
* OV_SCL ------------ PD6
* OV_SDA ------------ PD7
* OV_VSYNC ------------ PB7
* OV_HREF ------------ PA4
* OV_PCLK ------------ PA6
* OV_PWDN ------------ PG9
* OV_RESET ------------ PG15
* OV_XCLK ------------ PA8
* 本函数仅初始化与DCI接口相连接的11个引脚
* (OV_D0~D7/OV_VSYNC/OV_HREF/OV_PCLK)
* @param 无
* @retval 无
*/
void dci_init(void)
{
GPIO_Config_T gpio_init_struct;
DCI_Config_T dci_init_struct;
/* 使能时钟 */
RCM_EnableAHB2PeriphClock(RCM_AHB2_PERIPH_DCI); /* 使能DCI时钟 */
/* 配置DCI使用到的GPIO引脚,代码省略 */
/* 配置DCI */
DCI_Rest();
dci_init_struct.captureMode = DCI_CAPTURE_MODE_CONTINUOUS;
dci_init_struct.synchroMode = DCI_SYNCHRO_MODE_HARDWARE;
dci_init_struct.pckPolarity = DCI_PCK_POL_RISING;
dci_init_struct.vsyncPolarity = DCI_VSYNC_POL_LOW;
dci_init_struct.hsyncPolarity = DCI_HSYNC_POL_LOW;
dci_init_struct.capturerate = DCI_CAPTURE_RATE_ALL_FRAME;
dci_init_struct.extendedDataMode = DCI_EXTENDED_DATA_MODE_8B;
DCI_Config(&dci_init_struct);
/* 使能DCI及其相关中断 */
DCI_EnableInterrupt(DCI_INT_CC); /* 使能捕获完成中断 */
NVIC_EnableIRQRequest(DCI_IRQn, 2, 0); /* 使能DCI中断 */
DCI_Enable(); /* 使能DCI */
}
在DCI的初始化函数中可以看到,配置并使能了DCI,还为JPEG模式使能了DCI的捕获完成中断。
DCI驱动中,DCI的中断回调函数,如下所示:
/**
* @brief DCI中断服务函数
* @param 无
* @retval 无
*/
void DCI_IRQHandler(void)
{
if (DCI_ReadIntFlag(DCI_INT_CC) == SET) /* 判断捕获完成中断标志 */
{
jpeg_data_process(); /* 处理JPEG数据 */
LED1_TOGGLE(); /* LED1闪烁 */
g_ov_frame++; /* 更新帧数 */
DCI_ClearIntFlag(DCI_INT_CC); /* 清除捕获完成中断标志 */
}
}
可以看到,该函数主要就是调用了JPEG数据的处理函数,以及统计帧率。
摄像头返回的数据是使用DMA进行传输的,DCI驱动中,DMA的初始化函数,如下所示:
/**
* @brief 配置DCI DMA
* @note DCI使用DMA2 数据流1 通道1
* @param mem0addr: 存储器0地址
* @param mem1addr: 存储器1地址,0:不使用双缓冲模式
* @param memsize : 传输的数据项数目,范围:0~65535
* @param memblen : 存储器数据大小,见DMA_MEMORY_DATA_SIZE_T
* @param meminc : 存储器增量模式,见DMA_MEMORY_INC_T
* @retval 无
*/
void dci_dma_init( uint32_t mem0addr,
uint32_t mem1addr,
uint16_t memsize,
uint32_t memblen,
uint32_t meminc)
{
DMA_Config_T dma_init_struct;
/* 使能时钟 */
RCM_EnableAHB1PeriphClock(RCM_AHB1_PERIPH_DMA2); /* 使能DMA2时钟 */
/* 复位DMA */
DMA_DisableInterrupt(DMA2_Stream1, DMA_INT_TCIFLG);
DMA_Reset(DMA2_Stream1); /* 复位DMA */
while (DMA_ReadCmdStatus(DMA2_Stream1) != DISABLE); /* 等待DMA可配置 */
/* 配置DMA */
dma_init_struct.channel = DMA_CHANNEL_1;
dma_init_struct.peripheralBaseAddr = (uint32_t)&(DCI->DATA);
dma_init_struct.memoryBaseAddr = mem0addr;
dma_init_struct.dir = DMA_DIR_PERIPHERALTOMEMORY;
dma_init_struct.bufferSize = (uint32_t)memsize;
dma_init_struct.peripheralInc = DMA_PERIPHERAL_INC_DISABLE;
dma_init_struct.memoryInc = (DMA_MEMORY_INC_T)meminc;
dma_init_struct.peripheralDataSize = DMA_PERIPHERAL_DATA_SIZE_WORD;
dma_init_struct.memoryDataSize = (DMA_MEMORY_DATA_SIZE_T)memblen;
dma_init_struct.loopMode = DMA_MODE_CIRCULAR;
dma_init_struct.priority = DMA_PRIORITY_HIGH;
dma_init_struct.fifoMode = DMA_FIFOMODE_ENABLE;
dma_init_struct.fifoThreshold = DMA_FIFOTHRESHOLD_HALFFULL;
dma_init_struct.memoryBurst = DMA_MEMORYBURST_SINGLE;
dma_init_struct.peripheralBurst = DMA_PERIPHERALBURST_SINGLE;
DMA_Config(DMA2_Stream1, &dma_init_struct);
if (mem1addr == 0) /* 不使用双缓冲区模式 */
{
/* 禁用双缓冲区模式 */
DMA_DisableDoubleBufferMode(DMA2_Stream1);
NVIC_DisableIRQRequest(DMA2_STR1_IRQn);
}
else /* 使用双缓冲区模式 */
{
/* 使能双缓冲区模式 */
DMA_EnableDoubleBufferMode(DMA2_Stream1);
/* 配置存储器1地址 */
DMA_ConfigMemoryTarget(DMA2_Stream1, mem1addr, DMA_MEMORY_1);
/* 使能DMA传输完成中断 */
DMA_EnableInterrupt(DMA2_Stream1, DMA_INT_TCIFLG);
/* 使能DMA中断 */
NVIC_EnableIRQRequest(DMA2_STR1_IRQn, 2, 0);
}
}
可以看到,该函数配置DMA将DCI的数据传输至存储器,且可以配置单缓冲和双缓冲。
DCI驱动中,启动DCI传输的函数,如下所示:
/**
* @brief 启动DCI传输
* @note 无
* @retval 无
*/
void dci_start(void)
{
lcd_set_cursor(0, 0); /* 设置LCD光标到原点 */
lcd_write_ram_prepare(); /* 准备写GRAM */
DMA_Enable(DMA2_Stream1); /* 使能DMA */
DCI_EnableCapture(); /* 使能DCI捕获 */
}
因为在RGB565模式下,DMA将直接将DCI的数据传输至LCD上进行显示,因此在DCI的启动传输函数中对LCD进行了相应的操作,并使能了DMA和DCI。
DCI的驱动就介绍这么多,更多的请读者查看本章实验配套实验例程的源码。
46.2.3 SCCB驱动
本章实验的SCCB驱动主要负责向OV2640驱动提供配置OV2640摄像头的各种函数,SCCB协议与IIC协议十分相似,也可兼容IIC协议,因此请读者结合SCCB和IIC协议的相关文档查看本章实验配套实验源码中SCCB的相关驱动文件。本章实验中,SCCB的驱动代码包括sccb.c和sccb.h两个文件。
46.2.4 OV2640驱动
本章实验的OV2640驱动主要负责向应用层提供OV2640的初始化和各种配置函数,请读者结合正点原子OV2640模块(ATK-MC2640)的用户手册查看本章实验配套例程源码中的OV2640驱动代码。本章实验中,OV2640的驱动代码包括ov2640.c和ov2640.h两个文件。
46.2.5 实验应用代码
本章实验的应用代码,如下所示:
int main(void)
{
uint8_t t = 0;
uint8_t key;
NVIC_ConfigPriorityGroup(NVIC_PRIORITY_GROUP_3); /* 设置中断优先级分组为组3 */
sys_apm32_clock_init(336, 8, 2, 7); /* 配置系统时钟 */
delay_init(168); /* 初始化延时功能 */
usart_init(115200); /* 初始化串口 */
usmart_dev.init(84); /* 初始化USMART */
led_init(); /* 初始化LED */
key_init(); /* 初始化按键 */
lcd_init(); /* 初始化LCD */
usart2_init(921600); /* 初始化USART2 */
btmr_tmrx_int_init(10000 - 1, 8400 - 1);/* 初始化基本定时器中断,中断频率1Hz */
lcd_show_string(30, 50, 200, 16, 16, "APM32", RED);
lcd_show_string(30, 70, 200, 16, 16, "OV2640 TEST", RED);
lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);
while (ov2640_init() != 0) /* 初始化OV2640 */
{
lcd_show_string(30, 130, 240, 16, 16, "OV2640 ERROR", RED);
delay_ms(200);
lcd_fill(30, 130, 239, 170, WHITE);
delay_ms(200);
LED0_TOGGLE();
}
lcd_show_string(30, 130, 200, 16, 16, "OV2640 OK", RED);
ov2640_flash_intctrl(); /* 内部控制闪光灯 */
while (1)
{
t++;
key = key_scan(0);
if (key == KEY0_PRES) /* RGB565模式 */
{
g_ov_mode = 0;
break;
}
else if (key == WKUP_PRES) /* JPEG模式 */
{
g_ov_mode = 1;
break;
}
if (t == 100)
{
lcd_show_string( 30,
150,
230,
16,
16,
"KEY0:RGB565 KEY_UP:JPEG",
RED);
}
else if (t == 200)
{
t = 0;
lcd_fill(30, 150, 230, 150 + 16, WHITE);
LED0_TOGGLE();
}
delay_ms(5);
}
if (g_ov_mode == 0)
{
rgb565_test(); /* RGB565模式测试 */
}
else
{
jpeg_test(); /* JPEG模式测试 */
}
}
从上面的代码中可以看出,在初始化完OV2640摄像头后,并不断地扫描按键,若检测到KEY0按键被按下,则进入RGB565模式的测试,即将DCI获取到的摄像头图像数据,直接在LCD上进行显示,若检测到KEY_UP按键被按下,则进入JPEG模式的测试,即将DCI获取到的摄像头数据,通过USART2传输至PC上位机。
46.3 下载验证
在完成编译和烧录操作后,先将开发板断电,随后将摄像头模块通过摄像头延长线与开发板进行连接,同时连接好LCD模式和USART2与PC的连接,最后再给开发板供电(在插拔开发板上的接插件和模块时,要求必须断电操作,否则容易烧毁硬件)。程序运行后,可以看到LCD上提示按下KEY0按键进入RGB565模式的测试,按下KEY_UP按键进入JPEG模式的测试。
若此时按下KEY0按键,若开发板连接了LCD模块,便能够在LCD显示屏上看到摄像头采集到的实时画面,并且按下KEY0按键可以改变画面的对比度,按下KEY_UP按键可以改变画面的尺寸。
若此时按下KEY_UP按键,若开发板的USART2通过USB转串口模式与PC进行连接,并配置好PC端的上位机(正点原子 视频传输上位机,读者可前往正点原子资料下载中心下载该上位机软件),便可以在上位机软件中看到摄像头采集到的实时画面,并且按下KEY0按键可以改变画面的对比度,按下KEY_UP按键可以改变画面的尺寸。
在进入RGB565模式或JPEG模式测试后,可以通过串口调试助手查看到摄像头的实时帧率。