在FMCW雷达系统使用复基带架构(TI文档)
摘要
本文阐述了复基带架构在调频连续波(FMCW)雷达系统中的优势。典型的雷达前端实现使用带有真实基带和模数转换器(ADC)链的真实混频器。然而,在FMCW雷达的背景下,使用正交混频器和复基带架构可以发挥性能优势。该架构已在德州仪器的76 - 81 GHz全集成互补金属氧化物半导体(CMOS)毫米波(mmWave)传感器中实现。
本白皮书的第一部分介绍了FMCW雷达背景下的复基带架构以及该架构的优点。第二部分解释了复基带如何不会增加数字信号处理(DSP)端的内存要求或计算负担。
1.介绍
从历史上看,雷达实现使用分立元件(功率放大器(PA)、低噪声放大器(LNA)、压控振荡器(VCO)、模数转换器(ADC)),但现在更多的集成解决方案正在出现。基于互补金属氧化物半导体(CMOS)的雷达,将所有射频(RF)和模拟功能以及数字信号处理(DSP)功能集成到单个芯片中,代表了最终的雷达系统芯片解决方案。这种高度集成的设备大大简化了雷达传感器的实现,使传感器具有紧凑的外形,并使解决方案具有成本效益。德州仪器(TI)为快速增长的汽车和工业雷达市场提供一系列高度集成的76 – 81GHz雷达器件。
本白皮书重点介绍了德州仪器76 – 81GHz雷达器件的一个特殊方面:使用正交混频器和复基带架构,而不是传统的真实混频器和真实基带架构。
2.FMCW雷达概念
让我们回顾一下FMCW雷达背后的工作原理。在FMCW雷达解决方案中,发射信号是线性调频连续波(L-FMCW)chirp序列,其频率与时间特性遵循如下页图1所示的锯齿模式。线性FMCW发射chirp的频率fT(t)和相位ΦT(t)分别表示为时间的线性和二次函数,如图1所示。

图1 FMCW锯齿信号图
在典型的FMCW雷达实现中(下图2),本振(LO)模块产生线性调频连续波信号cos(ΦT(t)),经功率放大器放大后从天线发射出去。
雷达照射到感兴趣区域内的任何物体都会反射发射的信号。接收天线接收反射信号,LNA对其进行放大。接收到的信号与LO信号混合产生拍频(中频[IF])输出,ADC将其数字化,DSP随后进行处理。

图2 FMCW雷达的高层模块图
图3描述了接收到的FMCW信号的性质,该信号由发射信号对应于各种对象的不同延迟和衰减副本组成。您可以看到,与每个物体对应的拍频信号是一个音调(忽略chirp开始和结束时的边缘效应),其频率fb与物体与雷达的距离r成正比。因此,检测物体(目标)及其各自与雷达的距离的过程涉及对拍频信号进行快速傅里叶变换(FFT)并识别噪底中突出的峰值。
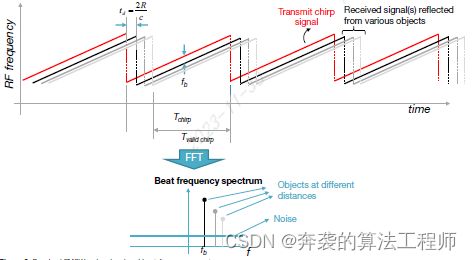
图3 接收FMCW雷达信号和拍频频谱
实际上,除了这个非常简化的FMCW雷达检测阐释之外,还有许多细节,特别是在考虑移动物体时。对于移动物体,拍频信号也有一个多普勒分量,它取决于雷达和目标之间的相对速度。您可以通过在chirp上执行第二次FFT并观察从一个chirp到下一个chirp的节拍信号的相移来估计多普勒分量,从而估计相对速度。总而言之,检测过程包括对每个chirp对应的接收样本执行一维FFT,然后跨chirp执行该输出的二维FFT。二维FFT处理的结果是目标在距离-速度网格中的图像。检测过程发生在二维FFT输出上,涉及检测噪底或周围杂波中的峰值。
在大多数实现中,也有一个基于多天线波束成形的角度估计过程,本白皮书中不会讨论这些细节。
3.使用实基带实现FMCW雷达
目前大多数雷达实现使用实混频器和实(仅I通道)基带和ADC链。这种类型的实现部分是由于在基于离散解决方案的雷达实现中不必将ADC和可变增益放大器(VGAs)的数量增加一倍而获得的成本优势。
图4显示了发射(LO)、接收(RX)和拍频(IF)信号的瞬时频谱。图4a显示了LO信号的cos(ΦT(t))频谱,表示渐变LO的瞬时频率。图4b中的RX信号频谱包含代表不同目标的LO信号的延迟和衰减版本。感兴趣的信号包含在RX信号频谱的“带内”部分,而频谱的“虚部带”部分没有任何感兴趣的信号。这是因为接收信号总是相对于发送LO信号“延迟”。因此,不同物体对应的拍频总是落在复基带频谱的一侧。热噪底,显示为蓝色水平条,分布在带内和虚部带。

图4 实混频器和实基带受到虚部带噪声折叠影响。(a)本振 (TX)信号频率上升的瞬时频谱,(b)各种物体反射后的RX信号,(c)实混频器后的中频信号。
如图4c所示,当使用实混频器和实基带链时,混频器后的中频信号频谱会受到虚部带噪声折叠的影响。换句话说,中频信号经历了由带内和虚部带噪声引起的信噪比(SNR)损失。这将导致高达3dB的性能损失,正如您将看到的,使用复基带链可以避免这种性能损失。
4.复基带实现
图5中的框图显示了正交混频器和复基带架构的使用。在这种情况下,接收到的信号与本振的cos()和sin()版本混合,具有重复的中频链以及用于同相(I)和正交(Q)通道的ADC。

图5 复基带架构
下图6显示了正交混频器和复基带实现的各种信号频谱。由于RX信号在正交混频器中与cos(ΦT(t)) + jsin(ΦT(t))混合,因此带内和虚部带保持分离,并且没有由于虚部带噪声折叠而导致的噪声增加。因此,这种架构可能具有总体噪声系数优势。

图6 正交混频器和复基带,无虚部带噪声折叠。(a) 本振 (TX)信号频率上升的瞬时频谱,(b)经过各种物体反射后的RX信号,(c)正交本振信号,(d)正交混频器后的中频信号。 让我们讨论FMCW雷达中复基带架构的一些关键优势。
4.1提高噪声系数
复基带架构最直接的好处是通过消除虚部带噪声折叠来实现噪声系数的改善。与代表实部实现的单边带(SSB)噪声系数相比,这里的有效噪声系数对应于改进的双边带(DSB)噪声系数。
理论上,噪声系数的改善可达3dB;在实际应用中,由于LNA后将接收信号分成I路和Q路所带来的信号功率损失,以及由此产生的中频噪声对总体噪声系数的更高贡献,因此噪声系数的改善在具体实现中将会更小。尽管如此,复基带实现仍存在有效的噪声系数改进。
当考虑到由TX噪声(幅度噪声或不相关相位噪声)裙主导的雷达系统时,这种改进尤为重要。在这些系统中,来自天线耦合或保险杠反射的噪声裙主导着RX热噪底。在这种情况下,复基带架构可以实现完全的3dB噪声系数优势。
4.2提高干扰容忍度
在FMCW雷达中,虚部带只包含噪声,不包含任何期望的信号。因此,通过复基带实现,您可以监控虚部带频谱,以检测干扰和/或准确估计无杂波的热噪声水平。
例如,您可以轻松地识别虚部带中存在的音调或能量尖峰,因为它来自干扰雷达设备,而不会对它是否可能是真正感兴趣的对象产生任何模糊——换句话说,检测和减轻干扰雷达的干扰,而不会对真正的对象产生任何模糊。
此外,由于复基带结构可以防止虚部带折叠,因此它对虚部带中存在的任何干扰具有更强的鲁棒性。在实基带架构中,存在于或扫过虚部带的任何干扰也会在带内折叠,从而更容易受到性能损失的影响。
4.3数字频率/相移用于射频延迟补偿
在支持多个RX链(用于RX波束形成)的典型雷达实现中,所有RX链的天线路由延迟和/或RF电路延迟必须匹配,以确保适当的波束形成功能。这对板路由以及跨信道的RF组件匹配提出了限制。
在这种情况下,从图3中可以看到,在FMCW雷达信号中,“延迟”相当于“频移”。拍频fb与往返时延td成正比,如图所示。基于这种观察,可以通过使用数字频率和/或相移来补偿雷达系统中的各种延迟。
使用复基带架构,任何延迟失配和/或RF相位响应失配都可以使用复基带输出进行数字补偿,甚至在FFT处理之前,通过对对应于每个RX通道的I和Q复数据样本使用不同的数字频率/相位去旋转。
4.4减少射频交调产物的影响
众所周知,当在f1和f2输入频率处有两个音调时,RF非线性(例如,三次非线性)会导致在(2f1-f2)和(2f2-f1)处产生交调产物。
在FMCW雷达接收机中,存在强天线耦合或保险杠反射信号(例如,在功率级P1和频率f1),再加上期望的强物体(例如,在功率级P2和频率f2),可能导致互调产物,从而导致幽灵目标。
大多数情况下,天线耦合或保险杠反射信号(P1)较大且接近直流电(f1接近于零);因此,在2f1-f2处的交调产物相对较大,并且落在虚部带内(大约在-f2处)。在纯实部实现中,这种交调产物将在带内折叠并降低实际对象在f2处的信噪比。复基带实现大大减轻了这个问题,因为虚部带不会折叠。
4.5功能安全检测冗余
双(I和Q)中频和ADC通道的可用性间接提供了一种冗余形式,有助于功能安全监控。再者,在一个功能齐全的系统中,虚部带没有任何期望的信号;因此,您可以观察虚部带能量与带内能量的关系,以检测I或Q通道中的故障,从而提高中频和ADC部分的功能安全监测。
4.6改进保险杠特征和附近物体检测
复基带结构可以准确地估计保险杠反射和/或附近物体的幅度和相位。具体来说,考虑到保险杠反射和非常近的物体的拍频处于低频(接近直流),I和Q输出的可用性可以更准确地估计这些信号的频率和相位。考虑到信号的低频率和chirp期间可用的短观测窗口,这种估计在仅实部链中要困难得多。
TI的76 – 81GHz集成毫米波传感解决方案实现了复基带架构,还包括数字基带电路,有助于利用这里概述的优势。
4.7DSP需求
为了支持复基带架构而重复使用中频和ADC不会增加DSP的内存负担或处理要求。让我们来讨论一下原因。
考虑图7所示的复基带的频谱。为了方便起见,该图显示了图6d的频谱翻转版本,以便所有物体都显示在正频率侧,更远的物体以更大的频率显示。在图7中,fb,max表示感兴趣的最远对象对应的最大拍频。
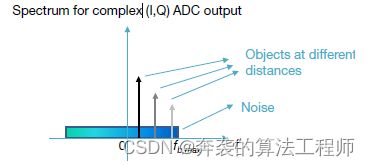
图7 FMCW雷达拍频频谱
在纯实部的传统实现中,ADC样本需要以最小(奈奎斯特)2fb的采样率输出到DSP,最大值为2fb,max。如图8的左侧,显示了具有较高噪声系数的纯实部频谱。
在图8右侧所示的复基带实现中,没有必要将ADC输出接口速率提高一倍。事实上,可以频移频谱,执行虚部抑制滤波,并将抽取的I通道和Q通道 ADC样本发送到DSP,最大值为fb,max。因此,由于使用复基带,ADC采样的接口速率到DSP并没有真正增加-实部输出在2fb,max变化到复输出在fb,max。将频谱集中在直流附近的频移有助于简化虚部抑制滤波的实现。
TI的雷达芯片包括一个内置的数字移频器,用于对采样移频,执行虚部抑制滤波,并以降低的接口速率(类似于实部实现)发送复基带输出。
另一个优势与DSP上处理的内存和每秒百万指令(MIPS)要求有关。纯实部实现需要用真实样本计算2n点FFT,而复基带实现需要用复输入样本计算n点FFT。大多数DSP架构都可以以相似的复杂度实现这两种功能。事实上,n点复FFT比2n点实FFT消耗更低的MIPS,这使得使用复基带输出更加有利。同样,两个选项对M chirp/帧的内存需求是相同的。表1总结了复基带和仅实部(基带)之间的比较。
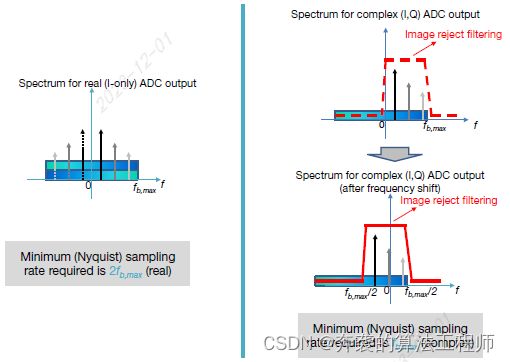
图8 实部基带和复基带输出的拍频频谱
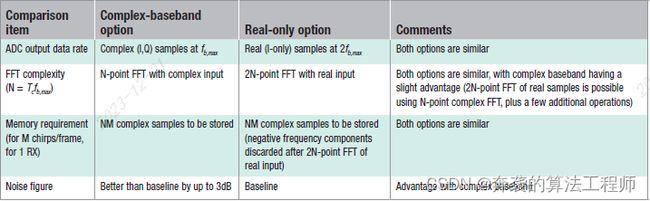
表1 数据率,MIPS和内存需求对比
5总结
在FMCW雷达系统中使用复基带架构可以获得各种性能优势,而不会影响ADC接口速率或DSP上的内存/MIPS要求。在高度集成的CMOS雷达解决方案中,该架构以低成本和低功耗高效实现。
考虑到噪声系数的改进,电流消耗没有明显的损失,因为您可以将更好的噪声系数与操作的开/关占空比进行权衡,以有效地降低电流消耗。因此,复基带架构是一个有用的功能,您可以通过TI的集成雷达解决方案加以利用。