【学习笔记】:PointNet的补充材料
1.比较PointNet与VoxNet的网络:
使用两个网络处理缺失点云数据,测试鲁棒性,划分相同的数据集,以1024个点作为输入。对于VoxNet,将点云数据划为323232的网格,并使用随即旋转与抖动增强数据集。由于VoxNet对旋转敏感,使用十二个视点的平均分数,结果如下:
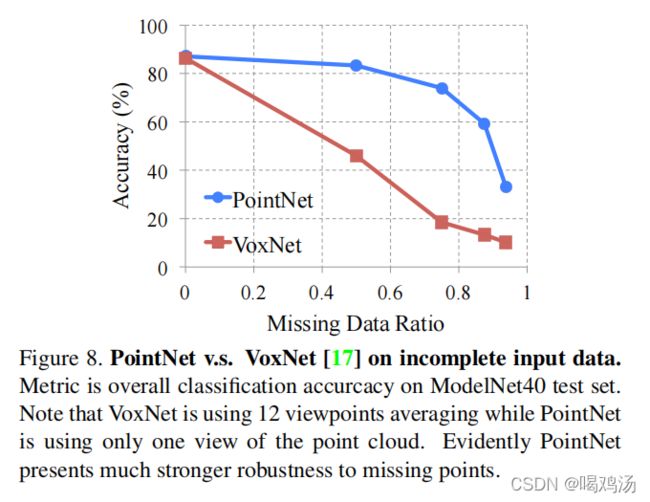
本文提出的网络对于数据缺失具有较强的鲁棒性。
2.网络框架和训练细节:
a.点云分类网络:
mini-PointNet(输入变换和特征变换),输入原始点云数据得到一个 3 ∗ 3 3*3 3∗3的矩阵,该网络又权值共享的MLP、最大池化和两个全连接层组成。 输出将矩阵倍初始化为一个单位矩阵。 除了最后一层都使用ReLu激活和批归一化处理。特征变换网络与上一个框架相同只不过输出64*64的矩阵。
在softmax分类器中加入正则化损失(权重0.001)实矩阵接近正交,在最后一个全连接层上使用0.7的dropout,并输出256个维度。批归一化的衰减率从0.5开始,然后逐渐增加到0.99。
b.点云分割网络:
分割网络使分类网络的延申,将分类网络的全局特征(softmax得到的)与中间层得到的局部特征(特征变换得到的)拼接,分割网络不使用Dropout,使用分类网络训练的参数。在拼接时又加入了表示输入类的独热编码向量(长为16)。

交叉类别进行训练(使用独热编码进行表明类别),只预测给定对象类别的部件标签。
c.三维卷积语义分割对照网络(Baseline 3D CNN Segmentation Network):

对于给定的点云数据先将其转换为32×32×32的立方体网格,第一层使用5个三维卷积核进行卷积,每层有32个通道,前四层为 5 ∗ 5 ∗ 5 5*5*5 5∗5∗5的核最后一层使用 3 ∗ 3 ∗ 3 3*3*3 3∗3∗3(会不断缩小最后输出 18 ∗ 18 ∗ 18 18*18*18 18∗18∗18大小)。每个体素的接受域为19 ,在计算出的特征图上添加 1 ∗ 1 ∗ 1 1*1*1 1∗1∗1的三维卷积层序列用来预测每个体素的分割标签。本网络是进行跨类别训练(但是会有标签信息)的,为了与其他方法对比,只考虑给定对象类别的输出分数。
3.检测方案的细节:
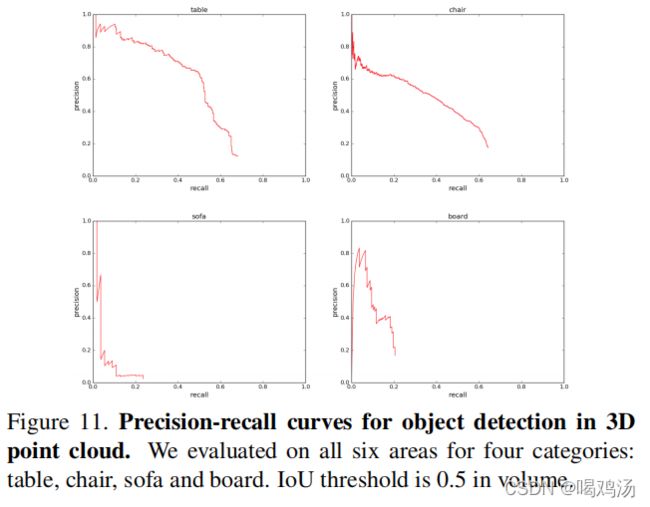
基于语义分割和分类设计三维目标检测系统,通过带有分割分数的连通分量获取场景中的目标信息,从场景中的随即一点开始,预测标签并且使用BFS收缩具有相同标签的点,收缩半径为0.2米。得到的结果簇如果超过200个点(如果结果少于200个点会减去),判定簇的边界框为一个对象,每一个预测对象的检测分数为该类别的平均分数。如果一个场景中有多个相同物体彼此相连,不能正确的将他们划分开(采用分类网络和滑动形状分割缓解这类问题)。
为每个类别训练一个二元分类网络,并采用滑动窗口检测,另外使用非最大抑制修剪,将联通分量与滑动形状预测边界组合进行最终评估。作者训练了六个模型,每个模型都在五个区域进行训练,并在左侧区域测试(左侧区域未参与训练),所有六个区域结果构成PR(召回)曲线:
4.更多应用:
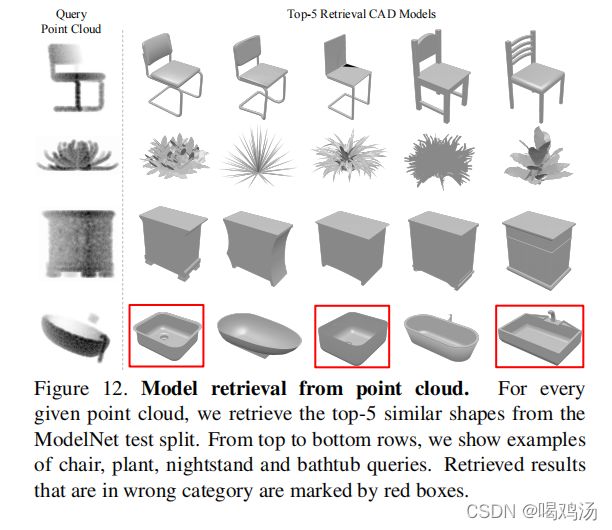
从点云中检索模型:本模型学习全局的特征,作者希望几何上相似的形状具有相似的全局特征,于是对于给定的查询形状,输入网络获取全局特征(在得分层之前输出),并且使用最邻近方法检索类似的形状。结果如下:其中红色框选的是错误检索的。
形状关系:本网络获得的特征可以用于计算形状之间的对应关系,输入两个形状,匹配全局特征的相同维度来计算关键点之间的对应关系。


5.结构分析:
最大池化的维度和输入点数的影响:
比较了最大层输出的大小和输入的点数对性能的影响,随着最大池化的输出增大准确率得到提升,在1K左右达到峰值,提升了3%左右的准确率。表明需要足够的点特征函数覆盖三维空间以区分不同的形状。
MNIST数字分类:
将网络拓展到二维的MNIST(手写数字)点云数据集,作者设置阈值并且添加了像素值大于128的像素,设置点集个数为256,若多于进行采样,少于进行填充。作者与其他传统的框架进行对比,结果好于其他的框架。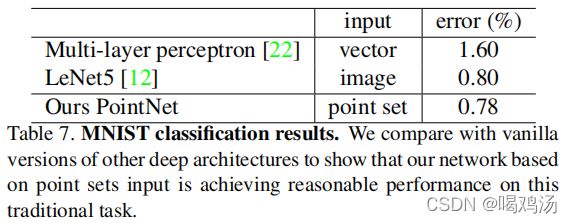
法线估计:
作者进行了全局与局部特征拼接,为局部提供了上下文信息,对拼接是否提供了上下文信息进行了探索,作者验证了分割网络可以预测点的法向量,也就验证了可以提供局部的上下文信息。设置有了一个有监督的版本,改变最后一层获得预测的法向量,并将余弦距离的绝对值作为损失。作者认为得到的结果在一些局部位置比金标准还光滑。

分割鲁棒性:
如上文所讲,分类网络对数据缺失和噪声具有较强的鲁棒性,这里讨论风格网络的鲁棒性。每点的预测值是基于每点的特征和全局特征得到的,结果如下,左图为输入,中间为关键点,右边为预测的最大可能边界,分割结果基本与关键点一致,

网络对不可见类别的实验:
就是测试网络对没有经过训练点集的识别能力,作者分析新出现的类别中对了一些网络未学到的平面信息,所以还是有些欠缺,但整体效果还是理想的。

6.定理论证:
定理一论证了设计的网络式一个对称的网络,并且可以拟合任意一个连续函数。

定理一:由于f是连续函数,取 δ ϵ \delta_{\epsilon} δϵ,当 d H ( S , S ′ ) < δ ϵ d_H(S,S')<\delta_{\epsilon} dH(S,S′)<δϵ时,对任意 S , S ′ ∈ X S,S'\in \mathcal{X} S,S′∈X都有 ∣ f ( S ) − f ( S ′ ) ∣ < ϵ |f(S) - f(S')| < \epsilon ∣f(S)−f(S′)∣<ϵ 。取 K = [ 1 / δ ϵ ] K=[1/\delta_{\epsilon}] K=[1/δϵ],将[0,1]划分为K个空间,并定义一个辅助函数将点映射到区间的左端,(中括号表示取整函数) 令 , S ~ = δ ( x ) = [ K x ] K , x ∈ S 令,\widetilde{S}=\delta(x)=\frac{[K_x]}{K} ,x\in S 令,S =δ(x)=K[Kx],x∈S
则 d H ( S , S ′ ) < 1 / K ≤ δ ϵ ( 我 认 为 这 里 直 接 取 等 号 就 行 ) d_H(S,S')<1/K\le\delta_{\epsilon}(我认为这里直接取等号就行) dH(S,S′)<1/K≤δϵ(我认为这里直接取等号就行)且, ∣ f ( S ) − f ( S ′ ) ∣ < ϵ |f(S) - f(S')| < \epsilon ∣f(S)−f(S′)∣<ϵ设指数函数 h k ( x ) = e − d ( x , [ k − 1 K , k K ] ) h_k(x)=e^{-d(x,[\frac{k-1}{K},\frac{k}{K}])} hk(x)=e−d(x,[Kk−1,Kk]),其中 d ( x , I ) d(x,I) d(x,I)表示要设定间隔的距离(我认为是输入点云数据到K个区间的每个单独的距离,也就是分别计算每点到每个类别的距离), h ( x ) = [ h 1 ( x ) , . . . h K ( x ) ] , 将 h 由 R 映 射 到 R K \mathbf{h}(x)=[h_1(x),...h_K(x)],将h由\mathbb{R}映射到\mathbb{R}^K h(x)=[h1(x),...hK(x)],将h由R映射到RK
设 v j ( x 1 , . . . x n ) = m a x { h ~ j ( x 1 ) , . . . , h ~ j ( x n ) } v_j(x_1,...x_n)=max\{\widetilde{h}_j(x_1),...,\widetilde{h}_j(x_n)\} vj(x1,...xn)=max{h j(x1),...,h j(xn)} 用S中的点表示第j个区间的占用率。 v = [ v i ; . . . ; v K ] , 即 将 v 由 R n 映 射 到 { 0 , 1 } K \mathbf{v}=[v_i;...;v_K],即将\mathbf{v}由\mathbb{R}^n 映射到\{0,1\}^K v=[vi;...;vK],即将v由Rn映射到{0,1}K
表示将输入的n个点转换为K个空间的最大可能值,每个点最大的可能值(或者可以理解为特征值),{0,1}的话可能类似与独热编码,若某个位置最大取值为1,不是最大标记为零。这是一个对称函数(不因输入序列的变化而改变结果),表示每个区间在S中的占用点(每个点所属的区间)。
定义 τ \tau τ为 { 0 , 1 } K 到 X \{0,1\}^K到\mathcal{X} {0,1}K到X的映射,即 τ ( v ) = { k − 1 K , v k ≥ 1 } ( 后 边 的 限 制 应 该 表 示 从 第 一 个 区 间 最 大 值 开 始 ) \tau(v)=\{\frac{k-1}{K},v_k\ge 1\} (后边的限制应该表示从第一个区间最大值开始) τ(v)={Kk−1,vk≥1}(后边的限制应该表示从第一个区间最大值开始)
它将占用向量 v \mathbf{v} v映射到一个包含每个被占用区间的左端的集合。即:
τ ( v ( x 1 , . . . , x n ) ) ≡ S ~ \tau(\mathbf{v}(x_1,...,x_n))\equiv \widetilde{S} τ(v(x1,...,xn))≡S 其中, x 1 , . . . , x n x_1,...,x_n x1,...,xn是S中元素按一定顺序排列的结果。
又设 γ \gamma γ为 R K \mathbb{R}^K RK到 R \mathbb{R} R的映射,是一个连续函数,定义为: γ ( v ) = f ( τ ( v ) ) ; v ∈ { 0 , 1 } K \gamma(\mathbf{v})=f(\tau(\mathbf{v})); v\in \{0,1\}^K γ(v)=f(τ(v));v∈{0,1}K,这样可以将上式修改为: ∣ γ ( v ( x 1 , . . . , x n ) ) − f ( S ) ∣ = ∣ f ( τ ( v ( x 1 , . . . , x n ) ) ) − f ( S ) ∣ < ϵ |\gamma(\mathbf{v}(x_1,...,x_n))-f(S)|=|f(\tau(\mathbf{v}(x_1,...,x_n)))-f(S)|<\epsilon ∣γ(v(x1,...,xn))−f(S)∣=∣f(τ(v(x1,...,xn)))−f(S)∣<ϵ
其中, γ ( v ( x 1 , . . . , x n ) ) \gamma(\mathbf{v}(x_1,...,x_n)) γ(v(x1,...,xn))可以改写为下式, γ ( v ( x 1 , . . . , x n ) ) = γ ( M A X ( h ( x 1 ) , . . . , h ( x n ) ) ) = ( γ ∘ M A X ) ( h ( x 1 ) , . . . , h ( x n ) ) \gamma(\mathbf{v}(x_1,...,x_n))=\gamma(MAX(h(x_1),...,h(x_n)))=(\gamma\circ MAX)(h(x_1),...,h(x_n)) γ(v(x1,...,xn))=γ(MAX(h(x1),...,h(xn)))=(γ∘MAX)(h(x1),...,h(xn))
其中, γ ∘ M A X \gamma\circ MAX γ∘MAX为对称函数。
定理二验证了神经网络具有较强的鲁棒性,可以忽略输入数据的干扰。

C S \mathcal{C_S} CS为关键点,f(S)为全局特征, N S \mathcal{N_S} NS式预测的最大可能形状值,T我认为i是输入的全部点集。显然 f ( S ) f(S) f(S)是由 u ( S ) \mathbf{u}(S) u(S)决定,故只需验证 ∀ S , ∃ C S , N S ∈ X , f ( T ) = f ( S ) … … 当 C S ∈ T ∈ N S \forall S,\exist \mathcal{C_S},\mathcal{N_S}\in \mathcal{X},f(T)=f(S)……当\mathcal{C_S}\in T\in \mathcal{N_S} ∀S,∃CS,NS∈X,f(T)=f(S)……当CS∈T∈NS对于 u \mathbf{u} u的第j维至少存在一个 x j ∈ X x_j\in\mathcal{X} xj∈X即, h j ( x j ) = u j h_j(x_j)=\mathbf{u}_j hj(xj)=uj, h j h_j hj是h向量输出的第j个维数,取 C S \mathcal{C_S} CS作为j=1,…K的所有 x j x_j xj的并集,则 C S \mathcal{C_S} CS满足上述条件。
所以,添加一些 h ( x ) ≤ u ( S ) h(x)\le \mathbf{u}(S) h(x)≤u(S)不会改变u和f的取值。将这类点叠加到 C S \mathcal{C_S} CS上就得到了 T S \mathcal{T_S} TS.