Mimicgen基本环境介绍Stack_d0
基本环境介绍-Stack_d0
- 前言
- 1. 机器人介绍
- 2. 夹具介绍
- 3. 交叉测试
-
- 更换机械人/夹具
- 修改物体属性
- 4. 取放逻辑解析
-
- 物体位姿存储
- 取放逻辑
- 放置成功判断
- 增加障碍物
- 后续探究方向
前言
仅介绍现有环境中提供的资源,鉴于 demo 中案例众多,本文以解析 case Stack_d0 为切入点进行介绍。
1. 机器人介绍



0:Sawyer 1:Panda 2:Jaco


3:Kinova3 4:IIWA 5:UR5e
2. 夹具介绍

0:RethinkGripper 1:PandaGripper 2:JacoThreeFingerGripper



3:JacoThreeFingerDexterousGripper 4:WipingGripper 5:Robotiq85Gripper


6:Robotiq140Gripper 7:RobotiqThreeFingerGripper 8:RobotiqThreeFingerDexterousGripper
3. 交叉测试
针对现有数据集,训练一个模型,同时进行更换机器人/夹具进行测试:
训练数据中机器人及夹具型号:
机器人: Panda
夹具: PandaGripper
更换机械人/夹具
测试场景

| 机器人 | 夹具 | horizon | 50次成功次数 |
|---|---|---|---|
| Panda | PandaGripper | 1000 | 48 |
| Sawyer | PandaGripper | 1000 | 46 |
| Jaco | PandaGripper | 1000 | 44 |
| Kinova3 | PandaGripper | 1000 | 14 |
| Panda | RethinkGripper | 1000 | 5 |
| Panda | WipingGripper | 1000 | / |
| Panda | RobotiqThreeFingerGripper | 1000 | / |
| Panda | Robotiq140Gripper | 1000 | / |
| Panda | RobotiqThreeFingerDexterousGripper | 1000 | / |
| Panda | Robotiq85Gripper | 1000 | / |
修改物体属性
size=0.02*0.05 acc=43/50

size=random([0.01,0.03] *[0.02,0.05]) acc=45/50

size=random([0.01,0.03] *[0.02,0.05], [0.025,0.05]]) acc=185/200
acc=48/50
4. 取放逻辑解析
首先定位到主要代码文件:
robosuite/environments/manipulation/stack.py
为增加测试准确性,现将物体A和物体B的尺寸都改成长宽分别在[0.01, 0.03], [0.02 , 0.04]区间内的随机参数。
物体位姿存储
首先要明确场景中的物体,经代码测试发现,物体的姿态可从 _load_model 中设置,可以实现的功能有:倒入模型( xml )文件,设置长方体,圆柱、球体等基本集合图形的尺寸,位置,颜色,纹理等等
取放逻辑
def _setup_observables(self):
@sensor(modality=modality)
def cubeA_to_cubeB(obs_cache):
return (
obs_cache["cubeB_pos"] - obs_cache["cubeA_pos"]
if "cubeA_pos" in obs_cache and "cubeB_pos" in obs_cache
else np.zeros(3)
)
sensors = [cubeA_pos, cubeA_quat, cubeB_pos, cubeB_quat, gripper_to_cubeA, gripper_to_cubeB, cubeA_to_cubeB]
初步推测,cubeA_to_cubeB 即为生成取放逻辑的代码,为验证推测,将上述代码修改为:
# add new function
@sensor(modality=modality)
def cubeB_to_cubeA(obs_cache):
return (
obs_cache["cubeA_pos"] - obs_cache["cubeB_pos"]
if "cubeB_pos" in obs_cache and "cubeA_pos" in obs_cache
else np.zeros(3)
)
sensors = [cubeB_pos, cubeB_quat, cubeA_pos, cubeA_quat, gripper_to_cubeB, gripper_to_cubeA, cubeB_to_cubeA]
重点在 sensors 这行,除了需要将 cubeA_to_cubeB 修改为 cubeB_to_cubeA 外,还需要将前面对应的 pos, quat 顺序修改,测试效果如下:
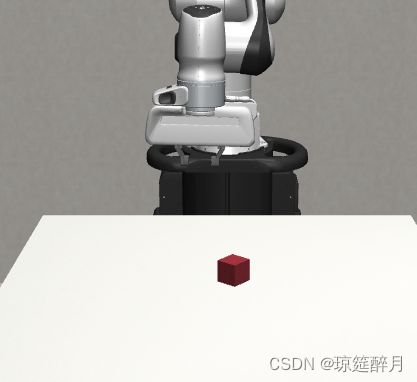
cubeA_to_cubeB(将红色的放到绿色上面)
cubeB_to_cubeA(将绿色的放到红色上面)
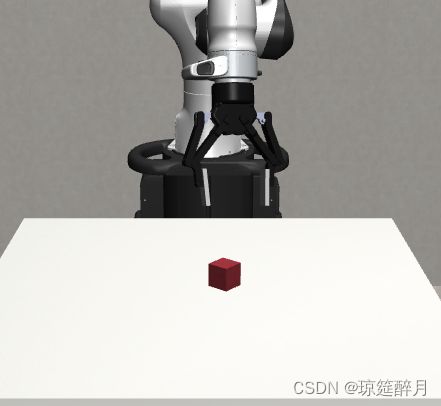
存在问题:将取放逻辑修改后,出现 截止判断异常的情况,无法正常判断是否完成放置。
放置成功判断
在数据集中,每个 demo_? 的子数据中存在一个关键词为 dones 的数据,该数据为 0/1,且只有在最后几位是 1,其余全是 0,初步推测,此为训练时判断是否成功的依据,但在 train 的过程中,也调用的了任务类 Stack ,进行了 _check_success 的判断。
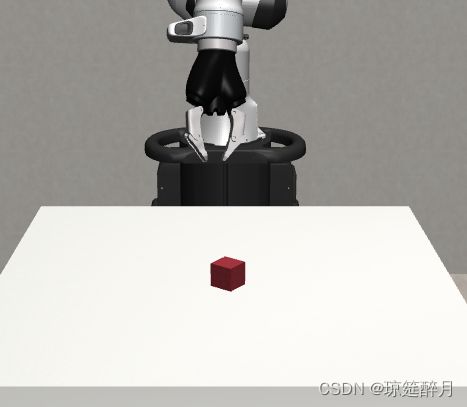
修改判断逻辑后,成功率显著提高(10%–>80%):
cubeB_to_cubeA(将绿色的放到红色上面,修改判断条件后的)
修改后代码如下所示,可与官方提供的 staged_rewards函数作对比:
function: staged_rewards_test
def staged_rewards_test(self):
cubeA_pos = self.sim.data.body_xpos[self.cubeA_body_id]
cubeB_pos = self.sim.data.body_xpos[self.cubeB_body_id]
gripper_site_pos = self.sim.data.site_xpos[self.robots[0].eef_site_id]
dist = np.linalg.norm(gripper_site_pos - cubeB_pos) #
r_reach = (1 - np.tanh(10.0 * dist)) * 0.25
# grasping reward
grasping_cubeB = self._check_grasp(gripper=self.robots[0].gripper, object_geoms=self.cubeB)
if grasping_cubeB:
r_reach += 0.25
# lifting is successful when the cube is above the table top by a margin
cubeB_height = cubeB_pos[2]
table_height = self.table_offset[2]
cubeB_lifted = cubeB_height > table_height + 0.04
r_lift = 1.0 if cubeB_lifted else 0.0
# Aligning is successful when cubeA is right above cubeB
if cubeB_lifted:
horiz_dist = np.linalg.norm(np.array(cubeB_pos[:2]) - np.array(cubeA_pos[:2]))
r_lift += 0.5 * (1 - np.tanh(horiz_dist))
# stacking is successful when the block is lifted and the gripper is not holding the object
r_stack = 0
cubeB_touching_cubeA = self.check_contact(self.cubeB, self.cubeA)
if not grasping_cubeB and r_lift > 0 and cubeB_touching_cubeA:
r_stack = 2.0
return r_reach, r_lift, r_stack
增加障碍物
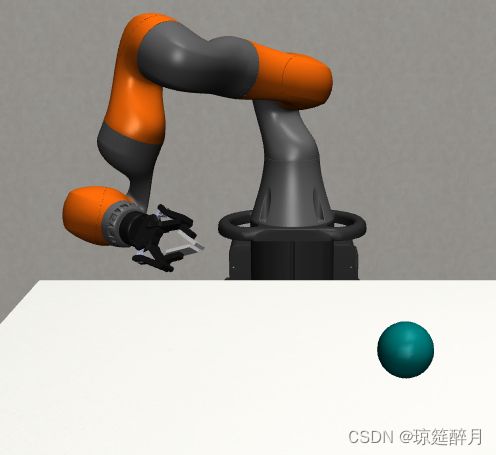
在现有场景中随机增加 n 个小球作为障碍物进行测试:
增加红色小球作为障碍物
结论:从视频效果分析,在进行抓取时,虽然有碰撞检测,但并未影响到抓取任务,初步怀疑可能是有些地方没有设置
后续探究方向
1:对于场景中存在障碍物的情况,是否可以实现避障操作,若可以,那么数据集与障碍物函数该怎么设计,若数据集中没有障碍物,但现实场景中有障碍物,该怎么处理;
2:给定夹具模型和物体模型,是否能自动实现抓取动作的判断与生成;
3:若 train 的物体与 test 物体的模型有细微区别,是否能自动判断夹具的抓取位置和抓取姿态,比如,把手在侧面的杯子和把手在顶部的杯子;
4:在取放逻辑相同,模型总体区别很大,但约束区域基本一致的物体,是否能实现取放流程的迁移,比如,冰箱门体与机器的装配,虽然外表千差万别,但铰链处是一样的;