C++11线程池实现
话不多说,先放代码
https://github.com/xyygudu/ThreadPool
多线程程序一定好吗?
不一定,要看当前程序的类型来判断,程序的类型有IO密集型和CPU密集型。
IO密集型:涉及一些IO操作的指令,比如设备、文件、网络等,这些IO操作很容易阻塞程序,也是比较耗时的操作。
CPU密集型:指令主要是用于计算的。
对于多核计算机来说,这两种类型的程序使用多线程都是有必要的,但是如果是单线程环境,IO密集型程序才适合多线程,比如某个任务处于网络阻塞状态,那就可以切换其他线程去处理其他任务;CPU密集型程序不适合多线程,因为就算是多个线程,这些计算指令依然还是这个核心来处理,除了执行指令外,还多了一些线程切换开销。
线程数量怎么确定?
线程的创建核销毁是非常"重"的操作。
线程本身占用大量内存。每个线程都有自己独立的栈空间。
线程的上下文切换非常耗时。如果cpu大量时间花在切换线程,就没时间处理任务了。
大量线程同时唤醒会使得系统出现瞬时负载量过大导致宕机。
线程数量一般都是按照当前CPU的核心数量来确定的。
线程池介绍
线程池基本原理
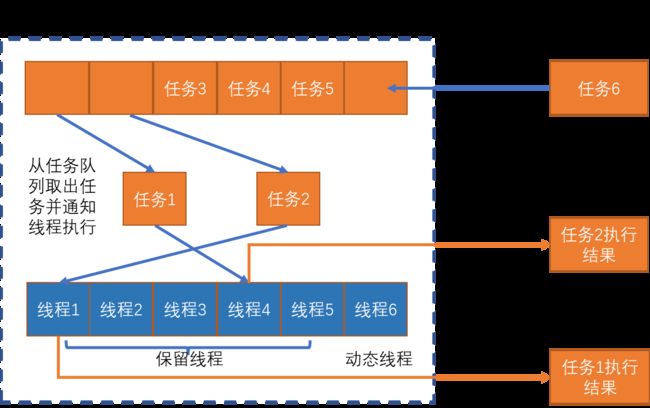
为了任务得到及时的处理(所谓任务可以理解为待执行的函数),把待处理的任务都放入线程池的任务队列中,线程池的多个线程就可以从该任务队列中取出任务并执行,线程再取出任务的同时,用户也可以向任务队列中添加新的任务,就好像用户只管把要执行的任务告诉线程池,线程池内部线程处理完成后返回用户处理结果。大致原理如下图。
有读者可能疑问,函数不是调用了就执行了吗,怎么还可以放入什么任务队列?是的,C++11提供了function模板,可以把函数当作一个可调用对象(可理解为一个变量)先保存起来,甚至可以把这个可调用对象存入容器中(比如queue中),然后可以再合适的时机把该调用对象取出来,然后执行。相当于把要执行的函数保存后延迟调用。
线程池的优势
服务进程启动之初,就事先在线程池重创建好了很多线程,当有任务需要执行时,就可以直接选择一个线程马上执行任务,而不必像之前一样,执行任务还需要额外时间先创建好线程。
任务执行完成后,不用释放线程,而是把线程归还到线程池中,便于为后续任务提供服务。
线程池应该具备的功能
线程池应该是可配置的。比如配置保留线程的数量,线程池最多能开启的线程数量等。
具有保留线程和动态线程。保留线程常驻在线程池中,只要线程池没有退出或者被回收,则常驻线程就不会终止;动态线程根据任务量的大小动态创建和销毁,当保留线程不能及时处理任务队列的任务时,增加动态线程,当任务队列为空,许多动态线程处于等待状态时,终止动态线程。
能够执行各种不一样的任务(参数不同的函数),并且能够获取执行结果
可获取当前线程池中线程的总个数,空闲线程的个数。
可以控制任务队列的任务数量,防止过多任务占用大量内存。
开启线程池功能的开关。关闭时确保当前任务能够执行完成,并丢弃剩下没有执行的任务,或者停止向任务队列中添加新任务,把剩余的任务执行完毕后退出。
线程池的实现
前置知识
本线程池使用C++11编写,主要使用到了以下的C++11特性,适合初学者入门。
std::function和std::bind、可变参数函数模板、package_task和future、原子类型(atomic)、条件变量、互斥锁、智能指针、lambda表达式、移动语义、完美转发
类的划分
线程池中共分为两个类,一个Thread类和一个ThreadPool类,Thread类主要是用于保存线程的一些基本属性、比如线程标志(是保留线程还是动态线程)、线程ID、std::thread等等,涉及到的方法主要是启动线程(start函数);ThreadPool类主要用于管理Thread类和任务队列,包括动态添/删除线程、向任务队列存取任务等等。这两个类的头文件主要代码如下:
class Thread : public std::enable_shared_from_this
{
public:
using ThreadPtr = std::shared_ptr;
using ThreadFunc = std::function;
enum class ThreadFlag { kReserved, kDynamic };
explicit Thread(ThreadFunc func, ThreadFlag flag = ThreadFlag::kReserved);
~Thread() = default;
// 获取线程id
pid_t getThreadId() { return threadId_; }
void start(); // 启动线程
private:
ThreadFlag threadFlag_; // 线程标志
pid_t threadId_; // 线程id
std::thread thread_; // 线程
ThreadFunc threadFunc_; // 线程执行函数
}; class ThreadPool
{
public:
using Task = std::function; // 定义任务回调函数
using Seconds = std::chrono::seconds;
using ThreadPoolLock = std::unique_lock;
using ThreadPtr = std::shared_ptr; // 线程指针类型
using ThreadFlag = Thread::ThreadFlag;
explicit ThreadPool();
~ThreadPool();
void start(); // 开启线程池
void stop(); // 停止线程池
template // 给线程池提交任务
auto submitTask(Func&& func, Args&&... args) -> std::future;
private:
void addThread(ThreadFlag flag = ThreadFlag::kReserved);// 向线程池中添加一个新线程
void removeThread(pid_t id);
void threadFunc(ThreadPtr threadPtr); // 线程执行函数
std::list workThreads_; // 存放工作线程,使用智能指针是为了能够自动释放Thread
std::mutex threadMutex_; // 工作线程互斥锁
std::queue tasks_; // 任务队列
std::mutex taskMutex_; // 互斥锁(从队列取出/添加任务用到)
std::condition_variable notFullCV_; // 任务队列不满
std::condition_variable notEmptyCV_; // 任务队列不空
std::condition_variable exitCV_; // 没有任务时方可线程池退出
// std::atomic_int taskNum_; // 任务队列中未处理的任务数量
std::atomic_int waitingThreadNum_; // 处于等待中的线程数量
std::atomic_uint curThreadNum_; // 当前线程数量
std::atomic_bool quit_; // 标识是否退出线程池
Config config_; // 存储线程池配置
}; 功能实现
ThreadPool构造函数做了什么?
构造函数主要初始化一些配置,比如保留线程的数量、线程池最大的线程数量等等。
线程池启动(start)时做了什么?
线程池调用start函数后,会根据配置中给定的保留线程数量向线程容器workThreads_中添加保留线程,添加保留线程实际上就是创建Thread对象,同时启动这些线程,Thread类也有个start函数,这个函数正式创建std::thread对象,并为std::thread绑定要运行的回调函数(即ThreadPool类的threadFunc函数),线程池启动后,此时所有保留线程都处于运行状态,都等待任务的到来。至于为什么要用智能指针封装Thread类,见回答“Thread类为什么要用智能指针”。
void ThreadPool::start()
{
quit_ = false;
size_t reservedThreadNum = config_.RESERVED_THREAD_NUM;
std::cout << "init thread num: " << reservedThreadNum << std::endl;
while (reservedThreadNum--)
{
addThread(); // 默认创建保留线程(threadFlag_=kReserved)
}
}
void ThreadPool::addThread(ThreadFlag flag)
{
// 默认创建保留线程(threadFlag_=kReserved)
ThreadPtr newThreadPtr(new Thread(std::bind(&ThreadPool::threadFunc, this, std::placeholders::_1), flag));
newThreadPtr->start(); // 启动线程,线程自动执行threadFunc
// 如果不把newThreadPtr添加到workThread_,函数运行结束后,newThreadPtr的引用计数为0,资源会被释放
ThreadPoolLock lock(threadMutex_);
workThreads_.emplace_back(newThreadPtr);
curThreadNum_++;
}子线程是怎么处理任务的?
子线程执行的是一个死循环,只有退出的线程的退出标志quit_=true时才会退出循环,子线程运行结束。子线程循行在ThreadPool的threadFunc函数中,该函数工作步骤如下:
获取互斥锁。因为多个线程要从任务队列中取出任务,因此,任务队列tasks_就是临界资源,子线程访问临界资源需要加锁
根据条件变量notEmptyCV_判断任务队列tasks_是否为空,只有tasks_为空并且线程池设置了退出标志(即quit_=true)时,才会将子线程自己从线程池的workThreads_中移除,这样做的目的是为了让线程池尽管设置了退出标志,但是只要任务队列不为空就会继续执行,换句话说,这是为了防止线程池退出时还有任务没有处理。其余情况均会从任务队列中取出任务并执行。
当子线程满足退出条件时,即quit_ && tasks_.empty()为true时,除了把自己从线程池中移除外,还有通知条件变量exitCV_,目的是为了让所有线程都从线程池中移除后再析构线程池对象,具体见“线程池怎么安全退出?”。主要代码如下(以保留线程为例,动态线程只是多了一个超时回收):
void ThreadPool::threadFunc(ThreadPtr threadPtr)
{
for(;;)
{
Task task;
{
ThreadPoolLock lock(taskMutex_);
std::cout << "tid:" << threadPtr->getThreadId() << " try to get one task..." << std::endl;
waitingThreadNum_++;
// 只要任务队列不为空或者线程池要退出,就不阻塞在wait
if (threadPtr->getThreadFlag() == Thread::ThreadFlag::kReserved)
{
notEmptyCV_.wait(lock, [this]() { return quit_ || !tasks_.empty(); });
waitingThreadNum_--;
// 只有当线程池quit_=true并且没有任务要处理的情况下,才会真正退出线程池
if (quit_ && tasks_.empty())
{
removeThread(threadPtr->getThreadId());
exitCV_.notify_all();
std::cout << "Reserved thread<" << threadPtr->getThreadId() << "> exit" << std::endl;
return;
}
else{
task = std::move(tasks_.front());
tasks_.pop();
notFullCV_.notify_all();
}
}
else
{
// 动态线程处理过程
}
}
if (task != nullptr) task(); // 执行任务
else std::cout << "task is null" << std::endl;
std::cout << "thread(id: " << threadPtr->getThreadId() << ") is running task" << std::endl;
}
}
如何向线程池中提交任务?
提交任务就是把任务打包,然后添加进任务队列中。具体过程如下:
打包任务,即把用户提交的任务打包成可调用对象,以便添加进任务队列。submitTask函数使用了可变参数模板,目的是为了为了能够处理用户传入的各种任务(即要能处理参数不固定的函数)
添加任务到任务队列。首先,在把打包好的任务添加进任务队列tasks_之前要先获取锁,然后,通过条件变量notFullCV_判断任务队列中的任务是否已经达到了上限,如果达到了就处于等待在此处,直到任务队列满足条件为止(此处似乎有个小bug:如果线程池设置了退出标志,就不应该继续向任务队列中添加任务,但是此处没有判断线程池是否退出,也就是说,尽管线程池设置了退出标志,只要有任务还在向任务队列中添加,线程池就无法退出,因为线程池能够成功退出的唯一条件是quit_=true && tasks_.empty()=true),紧接着,notEmptyCV_通知其他线程任务队列不为空。
增加动态线程。只要处于等待中的线程数量小于要处理的任务数量,就创建新的动态线程。
template
inline auto ThreadPool::submitTask(Func &&func, Args &&...args) -> std::future
{
using ReturnType = decltype(func(args...));
auto task = std::make_shared>(std::bind(std::forward(func), std::forward(args)...));
std::future result = task->get_future();
size_t taskSize = 0;
{
// 获取锁
ThreadPoolLock lock(taskMutex_);
notFullCV_.wait(lock, [this]()->bool {
bool notfull = false;
if (tasks_.size() < (size_t)config_.MAX_TASK_NUM) notfull = true;
else std::cout << "task queue is full..." << std::endl;
return notfull;
});
// 如果任务队列不满,则把任务添加进队列
tasks_.emplace([task]() {(*task)();});
taskSize = tasks_.size();
notEmptyCV_.notify_one();
}
// 根据任务队列中任务的数量以及空闲线程数量决定要不要新增线程
if ((size_t)waitingThreadNum_ < taskSize && curThreadNum_ < config_.MAX_THREAD_NUM)
{
addThread(ThreadFlag::kDynamic);
}
return result;
} 线程池怎么安全退出?
线程池退出时,最好等待所有子线程都退出后再退出自己。这是因为子线程会使用主线程(线程池)的资源,比如修改waitingThreadNum_变量等等,如果线程池对象已经析构了,而子线程还在执行,那后果是无法想象的,为了做到这一点,我们来看看stop函数做了些什么。
首先把quit_设置为ture,这一步非常关键,子线程在死循环中会检查quit_标志,当quit_=true时,他们自己会做相应的退出处理。
然后notEmptyCV_通知所有子线程,这是因为有的线程因为任务队列为空,处于等待状态,无法继续执行,因此这里notEmptyCV_.notify_all()并不是真的任务队列不为空,而是为了唤醒处于等待中的子线程,让他们正常退出。
等待所有子线程都把自己从线程池中移除。每一个子线程满足结束条件后,都会把自己从workThreads_中移除,只有当workThreads_.size()==0时,才能说明所有子线程都退出了,此时,最后一个子线程把自己从workThreads_中移除后,会通过exitCV_.notify_all()告诉线程池不必等待了,因为此时,workThreads_大小已经为0,线程池退出成功。
或许有读者疑问:不可以通过让workThreads_中的每一个子线程调用join()就好了吗,为什么要通过条件变量exitCV_?回答见“子线程是如何被回收的”。
void ThreadPool::stop()
{
// 线程池退出时,线程只有两种状态,要么wait要么run,所以要把处于wait状态的线程唤醒
quit_ = true;
// 唤醒所有处于kWaiting的线程
ThreadPoolLock lock(taskMutex_);
notEmptyCV_.notify_all();
// 等待所有线程退出并移出所有线程
exitCV_.wait(lock, [&]()->bool { return workThreads_.size() == 0; });
std::cout << "all thread remove from workThreads_ successfully" << std::endl;
}疑问解答
何时启动动态线程?
如果任务队列只要有任务就启动了动态线程似乎不太合适,因为很可能保留线程还在创建过程中,此时任务队列可能有几个任务处理不过来,当保留线程创建完毕后,很可能就足以处理任务队列中剩余的任务,所以任务队列有多少任务时启动动态线程?答:可以通过判断任务队列中任务的数量和空闲子线程数量相比较,如果等待中的线程数量比任务队列中的数量少,则可以创建动态线程,不过似乎也存在:保留线程还在创建过程中,此时任务队列数量大于已经等待中的线程数量,导致不必要的动态线程的创建,不过似乎问题不大。这里只是为了引发读者思考。
子线程是如何被回收的?
子线程运行的函数执行结束后(退出了循环),何时回收线程的资源(join或者detach),何时释放线程所属的类Thread?答:在start线程时就调用了detach来分离线程,虽然使用detach要十分慎重,但是这里没办法,start函数不能调用join,因为子线程不退出,主线程就会阻塞在join函数,导致start都执行不能结束,那还提交个毛的任务。那就不能在其他函数中调用join吗,比如stop函数中依次遍历workThreads_中的子线程进行join?不行,因为涉及到动态线程要回收,假如某个子线程等待超时了要回收,子线程会把自己从workThreads_中移除,后续线程池遍历workThreads_时,就无法找到这个刚移除的子线程了,因而无法从workThreads_中取出该线程,为其线程调用join了。所以本文在start函数中创建的线程调用了detach来回收线程。有读者又有疑问,可否在子线程在把自己从workThreads_中移除时顺便join或者detach?不行,因为子线程不可以join或者dtach自己,否则会出错)
Thread类为什么要用智能指针?
答:Thread是要被添加进线程池的容器的,相比于添加Thread类到容器中,显然没有添加一个指针效率高,但是如果是添加的裸指针Thread*,那就需要手动new Thread对象,如果忘记delete会导致内存泄露,因此,采用智能指针包裹Thread,共享指针和独占指针均可
为什么要让所有子线程退出后再销毁线程池
因为子线程使用了主线程(线程池)的资源(如quit_变量),如果线程池先被析构了,那子线程很可能还在运行,也就是可能会访问已经被销毁的资源,导致子线程出现异常而退出。这也是我比较推荐线程要join而谨慎detach的原因。
如何让所有线程退出后主线程退出?
方法一:引入新的条件变量exitCV_。即我使用的方法:在线程池的stop函数中用一个exitCV_专门用于查看worThreads_是否为空,不为空就一直等待,这要求每个子线程在事件循环中满足结束条件时,直接把自己从workThreads_中移除,同时exitCV_.notify_all();,此时尽管子线程的exitCV_进行了notify,但是只要worThreads_不为空,就依然还会处于等待状态,直到所有子线程把自己从workThreads_中移除。
方法二:为每一个Thread类添加一个是否退出标志,假设是kStop。此方法在子线程退出时,并不从workThreads_中移除自己,而是只把自己标记为kStop状态即可退出事件循环,那什么时候join或者detach呢,那就是在线程池退出时(调用stop时)先遍历workThreads_,把每个线程join或者detach一下,然后再清空workThreads_就行。优点:不必引入条件变量exitCV_,可以通过join的方式退出子线程,join更安全,缺点:子线程退出,但是子线程所属Thread类没有得到释放,而且给后续动态添加子线程带来了更复杂的情况:workThreads_中线程处于stop状态的应该优先被启用,如果仍需要增加线程,再创建新的线程。