PMCW体制雷达系列文章(3) – PMCW雷达之匹配滤波
说明
PMCW体制下,雷达在接收端对接收的目标回波信号使用单频载波混频并低通滤波后,采集得到的是调制速率达ns量级的相位编码信号。在信号处理端,PMCW体制使用匹配滤波器(match filter)进行距离维的压缩,这是与FMCW体制雷达最核心的差别,本文探讨匹配滤波及其实现。
匹配滤波其实在雷达信号处理中是很常用的一个手段(工具),比如SAR等类型雷达的信号处理其实都是用的匹配滤波,所以关于该概念的说明网上有很多的资料,更深入的内容读者可以继续研读后文所附参考资料或自行查找。
Blog
20231206 文章第一次写作
目录
说明
目录
一、匹配滤波原理与方法
二、PMCW体制雷达信号建模
三、仿真与讨论
3.1 参数设计
3.2 仿真结果与讨论
四、总结
五、参考资料
六、本文相关代码
一、匹配滤波原理与方法
我们可以将雷达与外界交互的整个过程:发射天线发射、目标反射电磁波、接收天线接收看成是一个线性时不变系统,如下图所示:

图1.1 雷达与外界交互示意图
假定雷达发射信号为S(t),则该系统的冲激响应为:
![]() (1-1)
(1-1)
式中,M表示目标个数,![]() 是目标散射特性(比如与RCS值等有关),
是目标散射特性(比如与RCS值等有关),![]() 是冲激函数,
是冲激函数,![]() 是该电磁波往返目标的耗时。
是该电磁波往返目标的耗时。
![]() (1-2)
(1-2)
式中,Ri表示第i个目标与雷达的相对距离,c为电磁波速度。雷达所发射的信号s(t)经过该系统后,输出信号![]() 为:
为:
![]() (1-3)
(1-3)
我们在信号处理端需要做的就是从![]() 获得表征目标特性的
获得表征目标特性的![]() (距离)和
(距离)和![]() (RCS值)。而常用的方法就是让其通过雷达发射信号s(t)对应的匹配滤波器,如下图所示:
(RCS值)。而常用的方法就是让其通过雷达发射信号s(t)对应的匹配滤波器,如下图所示:

图1.2 接收信号通过匹配滤波器
匹配滤波器顾名思义其实就是一种滤波器,这种滤波器可以达到的效果是:尽可能多地通过有用信号,并抑制其它信号,从而使目标的SNR尽可能地大(严格来说:匹配滤波器是使得输出端的信号瞬时功率与噪声平均功率的比值最大的线性滤波器)。为达到该目的,我们用发射信号s(t)的复共轭作为其频率响应函数(也即匹配滤波器),于是s(t)对应的匹配滤波器![]() 为:
为:
![]() (1-4)
(1-4)
将前式(1-3)中得到的![]() 与之做卷积,得到:
与之做卷积,得到:
![]() (1-5)
(1-5)
对该式做傅里叶变换(时域的卷积等于频域的乘积):
![]() (1-6)
(1-6)
进而:
![]() (1-7)
(1-7)
![]() 可以在合适的s(t)下为常数,则上式可以写成:
可以在合适的s(t)下为常数,则上式可以写成:
![]() (1-8)
(1-8)
再由逆傅里叶变换到时域:
![]() (1-9)
(1-9)
回到时域后(经过匹配滤波后),可以看到在信号所在位置![]() 处,有K倍的增益!我们此时便可以找到该增益对应的“尖峰”所在的位置
处,有K倍的增益!我们此时便可以找到该增益对应的“尖峰”所在的位置![]() ,从而得到目标的距离信息!匹配滤波的本质其实就是给予发射信号不同的时延,并与接收信号相乘,只有当时延刚好等于目标反射回波对应的时延时,得到的乘积幅值才会变大,这也就对应了前面所说的“尖峰”的位置,如下图所示[1]:
,从而得到目标的距离信息!匹配滤波的本质其实就是给予发射信号不同的时延,并与接收信号相乘,只有当时延刚好等于目标反射回波对应的时延时,得到的乘积幅值才会变大,这也就对应了前面所说的“尖峰”的位置,如下图所示[1]:
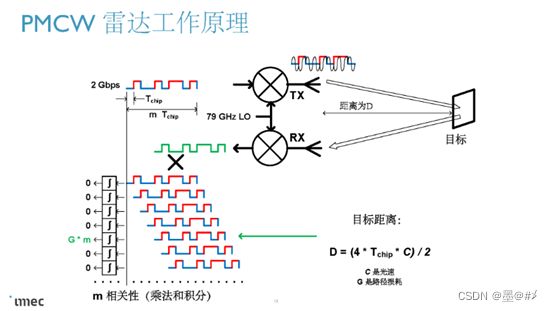
图1.3 匹配滤波原理示意图
如上图所示,只有当设计的时延等于目标所产生的回波延迟(4倍的Tchip)时,对应的乘积才不为0,我们籍此可以得到目标的时延,从而得到目标距离D。
二、PMCW体制雷达信号建模
我在本系列博文的第一篇:PMCW体制雷达系列文章(1) – PMCW体制雷达综述-CSDN博客中对PMCW雷达的发射模式做过论述,这里就不重复了,为便于理解,引用前述博文中的下图:
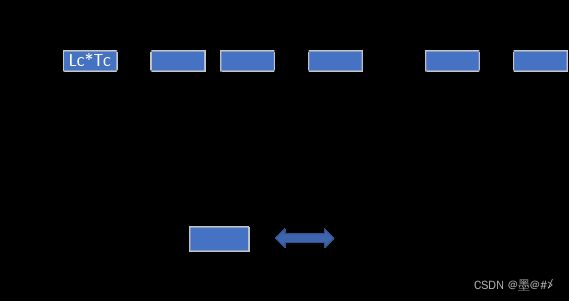
图2.1 两种体制雷达发射波形对比
承接(对应)前述博文中的描述,本章对单发单收下PMCW雷达的信号进行建模[2]。假设雷达发射的单脉冲包含Lc个长度为Tc的相位调制,并连续发射M次以作距离维度的累积,其在多普勒维度发射了N轮,该发射信号可以建模为:
![]() (2-1)
(2-1)
式中, rect为矩形函数,其定义:
![]() (2-2)
(2-2)
设载波频率为fo,则发射信号为:
![]() (2-3)
(2-3)
A1为常量,表征发射链路的增益。发射的电磁波在被目标反射并接收后,其回波信号为:
![]() (2-4)
(2-4)
式中,![]() 为回波时延,
为回波时延,![]() 为目标运动而产生的多普勒频移,A2是考虑到整个传播链路损耗后的电磁波能量幅值。在接收端经过混频、滤波并被ADC采集后,其时域信号为:
为目标运动而产生的多普勒频移,A2是考虑到整个传播链路损耗后的电磁波能量幅值。在接收端经过混频、滤波并被ADC采集后,其时域信号为:
![]() (2-5)
(2-5)
式中,A3为考虑接收链路损耗以及增益后的能量幅值,![]() 内含目标距离信息,后续在信号处理端可以通过匹配滤波得到,
内含目标距离信息,后续在信号处理端可以通过匹配滤波得到,![]() 是额外的相移,内含目标速度信息,可以通过多普勒维度的FFT得到。
是额外的相移,内含目标速度信息,可以通过多普勒维度的FFT得到。
前面做过说明,匹配滤波的本质是对发射信号进行不同的时延并与接收信号进行乘积,而其时延的最小间隔为单相位的调制宽度Tc,从这个角度来理解,PMCW体制雷达的距离分辨率为:
![]() (2-6)
(2-6)
而脉宽的倒数即对应带宽:B = 1/Tc,所以该式与FMCW体制雷达下的距离分辨率是类似的:
![]() (2-7)
(2-7)
只不过对于PMCW雷达,带宽B对应的是单chip脉宽对应的带宽,而对于FMCW雷达,B为ADC的采样带宽。此外,基于式(2-6)不难得到PMCW雷达从数据处理的角度其最远测量距离为:
![]() (2-8)
(2-8)
需要注意的是,类比FMCW体制雷达下从数据处理端而言其最远测量距离取决于中频带宽和采样率之间的较小值,PMCW体制雷达的最远测量距离其实还取决于单脉冲的采样时间(比如如果采样时间小于Tc*Lc,则其最远测量距离需以采样时长为依据)。
两种体制雷达在速度维度是一样的,类比FMCW体制雷达的测速分辨率以及最大无模糊测速范围公式,PMCW雷达对应的测试公式为:
![]() (2-9)
(2-9)
![]() (2-10)
(2-10)
以上完成了对PMCW体制雷达的信号建模与基本的分析,后文将在本章基础上进行合理的目标以及波形参数设计,对匹配滤波以及二维压缩的具体效果进行仿真和分析。
三、仿真与讨论
本章在前文的指导下,以最简单的1发1收下的单频单chip信号(更贴近实际的长为Lc*Tc的编码信号往后有机会再补上)为例进行仿真论证,本章所作的工作为:生成目标回波对应的ADC数据、对ADC数据进行匹配滤波以及速度维FFT处理,更后端的信号与数据处理本文不涉及。(此外需要说明的是,为简化仿真,本章中所生成的ADC数据其单个目标回波能量的幅值并没有从雷达方程的角度去考虑:也即没有考虑整个收发链路中的增益和损耗,因为这些并不影响本章想要论述的内容,如果需要更贴近实际的仿真,读者可以参考我之前的博文及其相关代码:毫米波雷达原始信号建模与仿真(ADC数据生成) _墨@#≯的博客-CSDN博客)。
3.1 参数设计
波形参数设计列表如下:
表3.1 波形参数设计列表
| 参数 |
值 |
| 载频 |
77GHz |
| 脉宽 |
5ns |
| 采样率 |
1GHz |
| 单脉冲采样时长 |
2us |
| 单脉冲采样点数 |
2001 |
| 单帧脉冲个数 |
256 |
| 脉冲周期 |
10us |
结合第二章中的分析,我们可以得到该参数设计下,雷达的测距分辨率:0.75m,最远测量距离(从数据处理端而言)为300m,速度分辨率为0.76m/s,最大无模糊测速范围为±97.40m/s。
目标参数设计如下:
表3.2 目标参数设计列表
| 参数 |
值 |
| 目标数量 |
4 |
| 目标距离 |
在最大测距范围内随机生成,且各目标间距大于距离分辨率。 |
| 目标速度 |
在最大测速范围内随机生成,且各目标速度间隔大于速度分辨率。 |
| 目标RCS |
全部设置为1dBsm |
| 目标初始相位 |
在(0,2pi)之间随机分布 |
| SNR |
加SNR为5dB的高斯白噪声 |
本章仿真主要是为论证匹配滤波的正确性,如果读者想要做更复杂的分析,比如让两目标的间隔小于距离分辨率等,可以自行使用本文提供的代码自己设计相应参数进行分析论证。随机生成的目标参数如下:
表3.3 目标距离和速度设计结果
| 目标ID |
距离(m) |
速度(m/s) |
| 1 |
57.63 |
-32.59 |
| 2 |
54.31 |
14.58 |
| 3 |
286.49 |
-24.95 |
| 4 |
190.43 |
47.56 |
3.2 仿真结果与讨论
在前述参数设计下,我们可以得到一个大小为256*2001的ADC数据矩阵,对该矩阵进行分析和处理,结果如下:
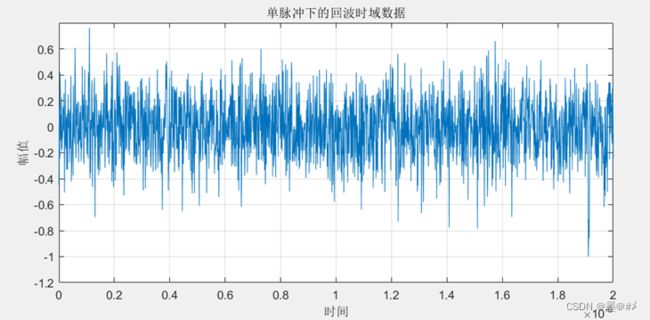
图3.1 单脉冲下的回波时域数据
选取了第一个脉冲的回波时域数据画图如上,可以看到,我们此时是无法从中知道目标所在位置的,对其进行匹配滤波处理,得到的结果如下:
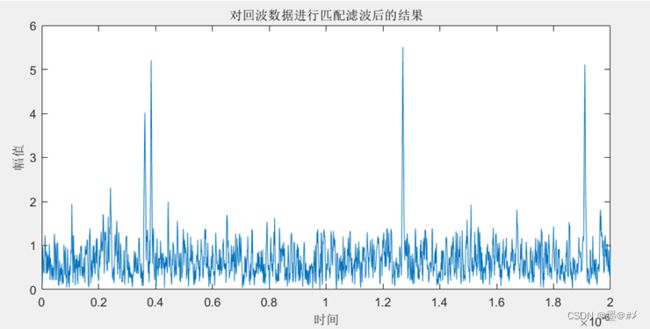
图3.2 单脉冲回波数据匹配滤波后的结果
对时域数据进行匹配滤波处理后,可以看到有四个明显的“尖峰”出现!这就对应上了在前文第1章中的分析:匹配滤波可以使得在目标对应的回波时延处产生增益,进而出现尖峰,我们找到该尖峰对应的时延也就得到了目标的距离!对矩阵的256个脉冲全部进行匹配滤波处理,得到结果:
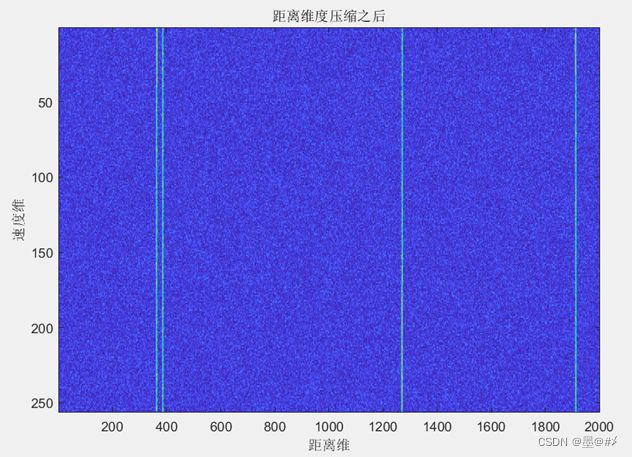
图3.3 距离维匹配滤波处理后的结果
该图所展示的结果与图3.2相互呼应,随后我们对其进行速度维度的压缩,得到结果如下:
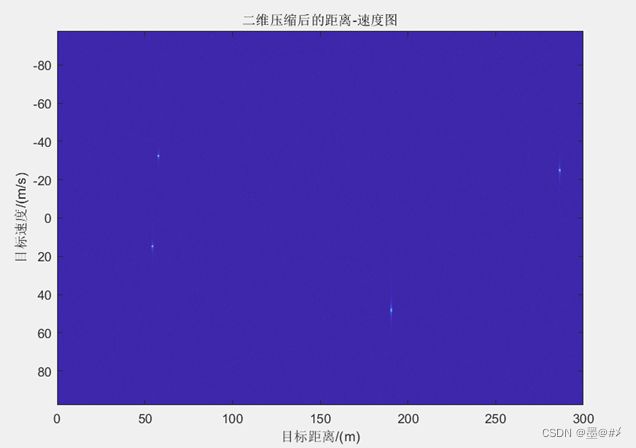
图3.4 二维压缩之后的结果1
图中亮点对应的位置即为目标所在的位置!换个更为直观的视角:
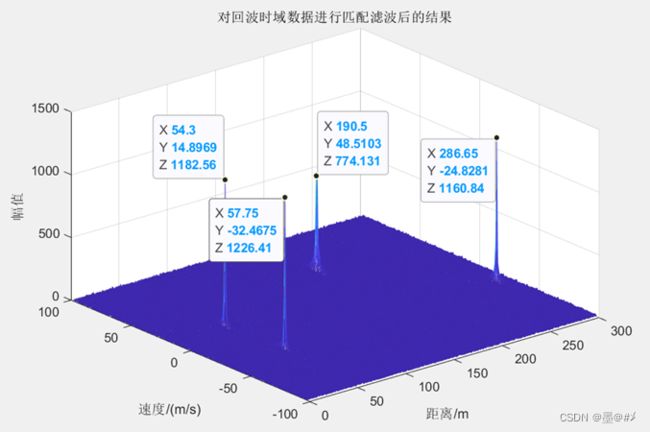
图3.5 二维压缩之后的结果2
图中尖峰即对应目标,其值与前述表3.3的目标参数设计结果基本吻合,验证了仿真的正确性。
四、总结
本文针对匹配滤波这个话题进行了讨论,首先对匹配滤波的原理与方法进行了介绍,随后对PMCW雷达的波形进行了建模,在本文第三章,对最简单的单频单chip下的单发单收进行了仿真和讨论,仿真的结果与理论分析做了很好的相互验证。匹配滤波作为PMCW&FMCW两种体制雷达在信号处理端最核心的区别,本文其实只做了初步的探讨,关于更贴近PMCW雷达实际的完整的相位编码信号的仿真、匹配滤波与FFT处理的优缺点对比是后续值得更深入研究的方向。
五、参考资料
[1] IMEC | A CMOS 79GHz PMCW Radar SoC - 知乎 (zhihu.com)
[2] Xu Z, Wu K, Liu X, et al. A 24 GHz MIMO PMCW Automotive Radar with Doppler Compensation[C]//2021 IEEE MTT-S International Wireless Symposium (IWS). IEEE, 2021: 1-3.
[3]线性调频(LFM信号)脉冲压缩雷达matlab仿真- 测距 测速 距离速度三维像-CSDN博客
六、本文相关代码
PMCW体制雷达系列文章(3)–PMCW雷达之匹配滤波博文对应的代码资源-CSDN文库