不用激光雷达,照样又快又准!3D目标检测之SMOKE

向大家介绍一篇CVPR 2020 Workshop的文章:SMOKE: Single-Stage Monocular 3D Object Detection via Keypoint Estimation。

0. 动机
3D目标检测用于估计目标的类别、位置和姿态,与2D目标检测相比,3D目标检测更具有挑战性。有很多工作研究使用激光雷达进行3D目标检测,激光雷达成本较高、寿命较短,与之相比,相机成本低、寿命长,且易于安装。
很多基于单目相机做3D目标检测的算法都是多阶段(multi-stage)的,即基于2D目标检测网络得到的2D框,在后面添加额外的分支预测3D框,亦或者是产生点云作为点云检测网络的输入,这种方法的弊端是:2D框检测的少许偏差可能会引起3D框检测的较大偏差。
作者提出了一个直接预测3D目标框的单阶段端到端算法,包含1个分类分支和1个回归分支,计算量小,易于训练且精度高。
1.建模
使用单目相机做3D目标检测,可以提炼为:输入RGB图像
和 分别表示输入图像的宽度和高度,输出图像中目标的类别 和3D框 。
使用 表示3D框 ,其中 表示目标的高、宽、长;
表示目标在相机坐标系中的坐标,单位为米;角度 表示3D框的航向角。
需要特别指出的是,要准确地预测3D框,需要知道相机内参 。
2. 网络结构
网络的总体结构如下图所示:

2.1 Backbone
使用与论文《Objects as points》类似的DLA-34作为Backbone,输出特征图的长和宽分别为输入图像的1/4。
与之不同的是,作者将网络中的BN(BatchNorm)替换为GN(GroupNorm),实验表明使用GN能减小网络性能对batch size的敏感程度,还能减少训练时间。
2.2 关键点检测分支
将目标3D框的中心点在图像平面的映射点
定义为关键点,关键点检测分支的目标就是寻找输入图像中的关键点。
在训练时,需要根据3D框确定关键点的位置,若知道相机内参 和目标3D框的中心点
根据如下公式求得关键点:
参考论文《Objects as points》中的做法,使用高斯函数作为关键点检测分支的学习目标。使用
表示3D框的8个顶点在图像中的位置,则
表示在图像中包围3D框的最小长方形,通过
确定高斯函数的标准差。
2.3 回归分支
使用向量
编码目标的3D框,它们的含义是:
表示深度偏移;
和 对下采样产生的量化误差进行补偿;
、 、 分别表示高、宽、长的残差(residual dimensions);
和 用于确定角度 。
相比于直接学习3D目标框各个属性的值,学习偏移量更容易训练。
因为要使用8个标量组成的向量 确定3D框,那么回归分支输出的feature map尺寸为
, 用于控制feature map的尺寸。
下面讲述网络输出的向量 与3D框属性的关系。
根据深度偏移量可以求得目标的深度值,公式如下:
上式中的 和 是预定义的值,
单位为米。
已知目标的深度 ,根据回归分支输出的 、 以及关键点检测分支输出的
可以得到目标在相机坐标系下的三维坐标:
根据回归分支输出的 、 、 以及预定义的
使用如下公式求目标的长、宽、高,单位为米。
网络输出的 和 所确定的角度 的含义为下图中的 所表示的角度:
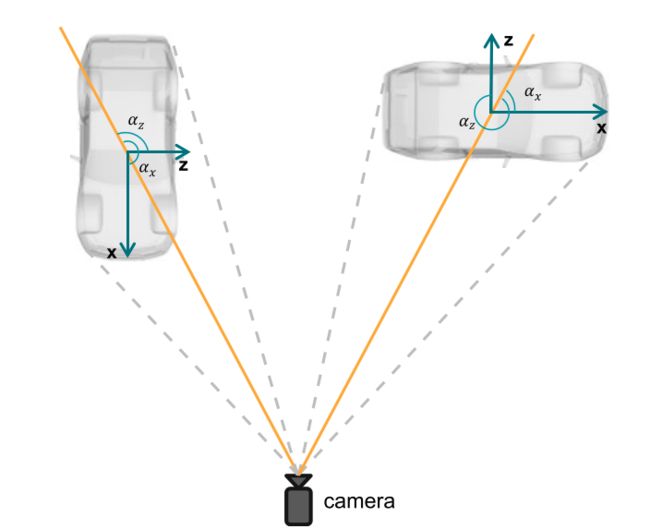
根据KITTI数据集中航向角的定义,可以根据角度 和目标在三维空间中的位置求得航向角 :
已知航向角 、长宽高三个维度的值
以及3D框中心点在相机坐标系下的坐标
可以得到相机坐标系下3D框的8个顶点坐标,公式如下:
上式中的 表示根据航向角 得到的旋转矩阵,
是如下矩阵的简写形式:
3. 损失函数
3.1 关键点分类损失
关键点检测分支的输出为 通道的feature map, 为类别总数,为了描述简单,以下只叙述针对其中一个通道(即1个类别)的损失函数。
使用focal loss构造关键点分类损失函数,令 表示网络前向计算时关键点检测分支的输出feature map在位置 处的值, 表示根据数据集中的标注、利用高斯函数得到的目标值。
首先分别定义 和 :
定义分类损失函数如下:
上式中
和 是超参数, , ,N表示关键点个数。
下面分别描述损失函数中 项和 项的作用:
当 时,由于 ,因此 ,若此时 接近于1,则 项令损失函数急剧衰减;若此时 接近与0,则 令损失函数轻微衰减。使得优化器更关注 接近0的样本。
当 时,由于 ,因此 ,若此时 接近于1,则 项令损失函数轻微衰减;若此时 接近与0,则 令损失函数急剧衰减。使得优化器更关注 接近于1的样本。
当 时,由于 ,因此 ,该项不起作用。
当 时,由于 ,因此 ,此时若 接近于1,即
接近高斯函数中“峰值”的位置,代表
在关键点附近,则 令损失函数急剧衰减,使得优化器不太关注
位置处的损失值,因为
在关键点附近,理应让 大一些。
3.2 回归损失
回归损失用于让网络输出更接近真值的 。
3D框高、宽、长的残差由回归分支输出的值进行非线性变换得到,变换表达式如下:
上式中 、 、 表示回归分支输出的值, 表示sigmoid函数。
角度值也要由回归分支输出的值进行非线性变换得到,变换表达式如下:
上式中的 和 表示回归分支输出的值。
向量 中的其他值直接使用回归分支的输出值。若得到向量 ,根据2.3中的描述,容易得到相机坐标系下3D框的8个顶点坐标,记作 ,使用该值和训练集中标注框的8个顶点坐标 构造损失函数,表示如下:
上式中的 为平衡关键点分类损失和回归损失的权重。
受到论文《Disentangling monocular 3d object detection》的启发,作者将回归分支的输出结果分为三组:
、 、 ,根据 以及预定义的 和 可以求出深度值 ,根据深度值 、 、 以及从标注数据中得到的3D框中心点在图像平面上的投影
,可以得到目标3D框中心点在相机坐标系下的坐标
;、 ,根据 和 可以得到 ,从标注数据中得到目标3D框中心点在相机坐标系下的坐标
,可以得到航向角 ;、 、 ,根据这三个值以及预定义的
可以得到目标3D框的长、宽、高。
只使用上面任何一组参数求取3D框的8个顶点坐标是不可能的,因为参数量不够,利用标注数据中的参数进行补全,使得上述三组参数能分别求出同一目标的3个3D框的8个顶点坐标,分别记作 、 、 ,利用 、 、 分别构造3个回归损失函数,将它们的和作为新的回归损失函数。这样做的好处是,能够将向量 中的多组参数对损失函数的贡献解耦开,使得优化器能分别优化上述3组参数。
整个网络的损失函数如下:
4. 实验
4.1 实验配置
使用KITTI数据集训练网络,实验时将3D框中心点在图像平面映射时超出图像区域的目标清除掉。在训练关键点检测分支时使用了数据增强,比如random horizontal flip、random scale and shift。GroupNorm操作中的group number设置为32,对于通道数小于32的层,group number设置为16。
网络的输入图片分辨率为1280x384,在4台TITAN X GPU上训练,batch size为32。
推理时,在关键点检测分支输出的feature map中选取100个得分最高且大于0.25的点作为关键点。
4.2 性能
训练完成后,使用KITTI的测试集评估性能,计算IoU大于0.7的 值,结果如下:
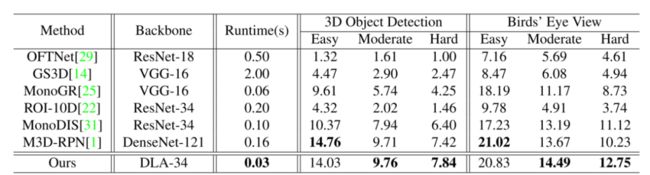
相比于其他方法,SMOKE算法取得了很好的结果,且推理时间只有30ms,完全满足实时性要求。
将SMOKE生成的3D框用于位置估计,并与其他方法比较,结果如下:

相比其他两种方法,SMOKE在位置估计上有明显优势。
此外,SMOKE也可以用于2D目标检测,将能包围3D框的最小2D框定义为2D目标检测的结果,结果如下:

5. 总结
本文有如下亮点:
直接通过单阶段网络预测3D框的属性,而不是先检测2D框,再利用2D框的信息生成3D框;
在构造回归分支的损失函数时,将多个属性对损失函数的贡献解耦,加速模型收敛;
模型结构简单,推理时间为30ms,具有实时性。
论文:https://arxiv.org/abs/2002.10111
源码:https://github.com/lzccccc/SMOKE
END

备注:目标检测

目标检测交流群
2D、3D目标检测等最新资讯,若已为CV君其他账号好友请直接私信。
我爱计算机视觉
微信号:aicvml
QQ群:805388940
微博知乎:@我爱计算机视觉
网站:www.52cv.net

在看,让更多人看到 