STM32与Freertos入门(五)任务案例
1、实现功能
通过两个按键任务分别控制不同的点灯案例
创建 4 个任务:在点灯任务的基础上在创建两个按键任务:
Task_led:间隔 500ms 闪烁 LE1;
Task_led2:间隔 1000ms 闪烁 LED2;
Task_key:如果 Task_led存在,则按下 KEY 后删除 Task_led,否则创建 Task_led;
Task_key2:如果 Task_led2正常运行,则按下 KEY2 后挂起 Task_led2,否则恢复 Task_led2
2、CubeMX配置
2.1 GPIO初始化

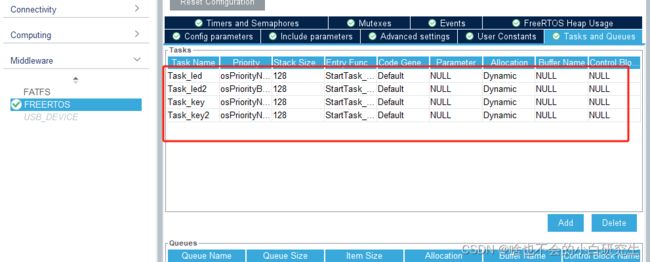
2.2 任务建立
 3、KEIL 5代码编写
3、KEIL 5代码编写
3.1 main.h初始化
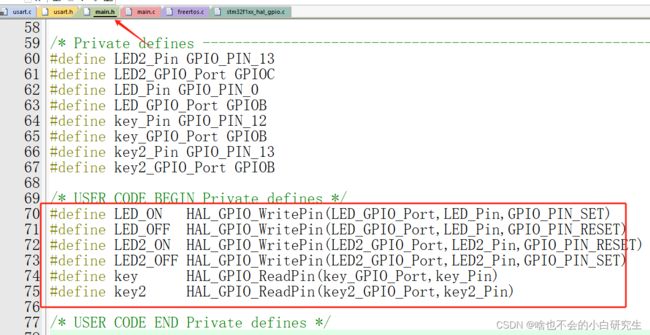
#define LED_ON HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_SET)
#define LED_OFF HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_RESET)
#define LED2_ON HAL_GPIO_WritePin(LED2_GPIO_Port,LED2_Pin,GPIO_PIN_RESET)
#define LED2_OFF HAL_GPIO_WritePin(LED2_GPIO_Port,LED2_Pin,GPIO_PIN_SET)
#define key HAL_GPIO_ReadPin(key_GPIO_Port,key_Pin)
#define key2 HAL_GPIO_ReadPin(key2_GPIO_Port,key2_Pin)3.2 功能实现
任务1:
void StartTask_led(void const * argument)
{
/* USER CODE BEGIN StartTask_led */
/* Infinite loop */
for(;;)
{
LED_ON;
osDelay(500);
LED_OFF;
osDelay(500);
}
/* USER CODE END StartTask_led */
}任务2:
void StartTask_led2(void const * argument)
{
/* USER CODE BEGIN StartTask_led2 */
/* Infinite loop */
for(;;)
{
LED2_ON;
osDelay(1000);
LED2_OFF;
osDelay(1000);
}
/* USER CODE END StartTask_led2 */
}任务3:
void StartTask_key(void const * argument)
{
/* USER CODE BEGIN StartTask_key */
/* Infinite loop */
for(;;)
{
if(key==0){
osDelay(20);
if(key==0){
printf("key按下\r\n");
if(Task_ledHandle == NULL){
osThreadDef(Task_led, StartTask_led, osPriorityNormal, 0, 128);
Task_ledHandle = osThreadCreate(osThread(Task_led), NULL);
if(Task_ledHandle != NULL){
printf("task_1成功\r\n");
}
}
else{
printf("detele\r\n");
osThreadTerminate(Task_ledHandle);
Task_ledHandle = NULL;
}
}
while(key==0);
}
osDelay(10);
}
/* USER CODE END StartTask_key */
}任务4:
void StartTask_key2(void const * argument)
{
/* USER CODE BEGIN StartTask_key2 */
static int flag = 0;
/* Infinite loop */
for(;;)
{
if(key2==0){
osDelay(20);
if(key2==0){
printf("key2按下\r\n");
if(flag == 0){
osThreadSuspend(Task_led2Handle);
printf("任务2以暂停\r\n");
flag=1;
}
else{
osThreadResume(Task_led2Handle);
printf("任务2恢复\r\n");
flag=0;
}
}
while(key2==0);
}
osDelay(10);
}
/* USER CODE END StartTask_key2 */
}整个freertos.c代码如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
osThreadId Task_ledHandle;
osThreadId Task_led2Handle;
osThreadId Task_keyHandle;
osThreadId Task_key2Handle;
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartTask_led(void const * argument);
void StartTask_led2(void const * argument);
void StartTask_key(void const * argument);
void StartTask_key2(void const * argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/* GetIdleTaskMemory prototype (linked to static allocation support) */
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize );
/* USER CODE BEGIN GET_IDLE_TASK_MEMORY */
static StaticTask_t xIdleTaskTCBBuffer;
static StackType_t xIdleStack[configMINIMAL_STACK_SIZE];
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCBBuffer;
*ppxIdleTaskStackBuffer = &xIdleStack[0];
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
/* place for user code */
}
/* USER CODE END GET_IDLE_TASK_MEMORY */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of Task_led */
osThreadDef(Task_led, StartTask_led, osPriorityNormal, 0, 128);
Task_ledHandle = osThreadCreate(osThread(Task_led), NULL);
/* definition and creation of Task_led2 */
osThreadDef(Task_led2, StartTask_led2, osPriorityBelowNormal, 0, 128);
Task_led2Handle = osThreadCreate(osThread(Task_led2), NULL);
/* definition and creation of Task_key */
osThreadDef(Task_key, StartTask_key, osPriorityNormal, 0, 128);
Task_keyHandle = osThreadCreate(osThread(Task_key), NULL);
/* definition and creation of Task_key2 */
osThreadDef(Task_key2, StartTask_key2, osPriorityNormal, 0, 128);
Task_key2Handle = osThreadCreate(osThread(Task_key2), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartTask_led */
/**
* @brief Function implementing the Task_led thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_led */
void StartTask_led(void const * argument)
{
/* USER CODE BEGIN StartTask_led */
/* Infinite loop */
for(;;)
{
LED_ON;
osDelay(500);
LED_OFF;
osDelay(500);
}
/* USER CODE END StartTask_led */
}
/* USER CODE BEGIN Header_StartTask_led2 */
/**
* @brief Function implementing the Task_led2 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_led2 */
void StartTask_led2(void const * argument)
{
/* USER CODE BEGIN StartTask_led2 */
/* Infinite loop */
for(;;)
{
LED2_ON;
osDelay(1000);
LED2_OFF;
osDelay(1000);
}
/* USER CODE END StartTask_led2 */
}
/* USER CODE BEGIN Header_StartTask_key */
/**
* @brief Function implementing the Task_key thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_key */
void StartTask_key(void const * argument)
{
/* USER CODE BEGIN StartTask_key */
/* Infinite loop */
for(;;)
{
if(key==0){
osDelay(20);
if(key==0){
printf("key按下\r\n");
if(Task_ledHandle == NULL){
osThreadDef(Task_led, StartTask_led, osPriorityNormal, 0, 128);
Task_ledHandle = osThreadCreate(osThread(Task_led), NULL);
if(Task_ledHandle != NULL){
printf("task_1成功\r\n");
}
}
else{
printf("detele\r\n");
osThreadTerminate(Task_ledHandle);
Task_ledHandle = NULL;
}
}
while(key==0);
}
osDelay(10);
}
/* USER CODE END StartTask_key */
}
/* USER CODE BEGIN Header_StartTask_key2 */
/**
* @brief Function implementing the Task_key2 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_key2 */
void StartTask_key2(void const * argument)
{
/* USER CODE BEGIN StartTask_key2 */
static int flag = 0;
/* Infinite loop */
for(;;)
{
if(key2==0){
osDelay(20);
if(key2==0){
printf("key2按下\r\n");
if(flag == 0){
osThreadSuspend(Task_led2Handle);
printf("任务2以暂停\r\n");
flag=1;
}
else{
osThreadResume(Task_led2Handle);
printf("任务2恢复\r\n");
flag=0;
}
}
while(key2==0);
}
osDelay(10);
}
/* USER CODE END StartTask_key2 */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */