firefly-rk3288j开发板--linux spi实验之flash驱动
firefly-rk3288j开发板–linux spi实验之flash驱动
1 准备工作
开发板:aio-rk3288j
SDK版本:rk3288_linux_release_20210304
下载工具:Linux_Upgrade_Tool_v2.1
内核版本:4.4.194
文件系统:buildroot
Ubuntu版本:18.04
交叉编译工具:gcc version 6.3.1 20170404
2 硬件原理图
2.1 开发板SPI接口


2.2 w25q64模块原理图

3 SPI使用
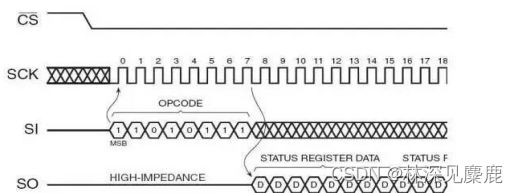
SPI 是一种高速的,全双工,同步串行通信接口,用于连接微控制器、传感器、存储设备等,本文以W25Q64模块为例简单介绍 SPI 使用。
SPI 以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少 4 根线,分别是:
CS 片选信号
SCLK 时钟信号
MOSI 主设备数据输出、从设备数据输入
MISO 主设备数据输入,从设备数据输出
Linux 内核用 CPOL 和 CPHA 的组合来表示当前 SPI 的四种工作模式:
CPOL=0,CPHA=0 SPI_MODE_0
CPOL=0,CPHA=1 SPI_MODE_1
CPOL=1,CPHA=0 SPI_MODE_2
CPOL=1,CPHA=1 SPI_MODE_3
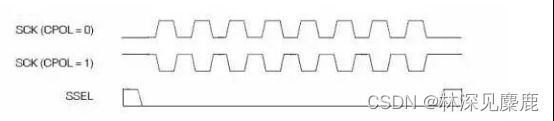
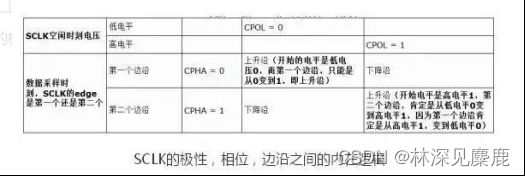
SPI的CPOL,表示当SCLK空闲idle的时候,其电平的值是低电平0还是高电平1:CPOL=0,时钟空闲idle时候的电平是低电平,所以当SCLK有效的时候,就是高电平,就是所谓的active-high。
CPOL=1,时钟空闲idle时候的电平是高电平,所以当SCLK有效的时候,就是低电平,就是所谓的active-low。
CPHA=0,表示第一个边沿:
对于CPOL=0,idle时候的是低电平,第一个边沿就是从低变到高,所以是上升沿;
对于CPOL=1,idle时候的是高电平,第一个边沿就是从高变到低,所以是下降沿;
CPHA=1,表示第二个边沿:
对于CPOL=0,idle时候的是低电平,第二个边沿就是从高变到低,所以是下降沿;
对于CPOL=1,idle时候的是高电平,第一个边沿就是从低变到高,所以是上升沿;
4 API函数
spi_alloc_master 函数用于申请 spi_master
struct spi_master *spi_alloc_master(struct device *dev, unsigned size)
注册函数
int spi_register_master(struct spi_master *master)
注销函数
void spi_unregister_master(struct spi_master *master)
5 DTS配置
设备树文件位于内核kernel/arch/arm/boot/dts目录下,我们需要打开rk3288.dtsi、rk3288-linux.dtsi、rk3288-firefly-port.dtsi、rk3288-firefly-aio.dtsi.d打开rk3288-firefly-aio.dtsi文件,添加spi设备节点:
&spi2 {
status = "okay";
w25q64: w25q64@0{
compatible = "firefly,w25q64";
spi-max-frequency = <24000000>;
reg = <0>;
wp-gpio = <&gpio7 2 GPIO_ACTIVE_HIGH>;
/*cs-gpios = <&gpio8 7 GPIO_ACTIVE_LOW>;*/
pinctrl-names = "default";
pinctrl-0 = <&w25q64_wp>; /*<&w25q64_cs>; */
spi-cpha;
spi-cpol;
};
};
&pinctrl {
w25q64 {
/*w25q64_cs: w25q64-cs {
rockchip,pins = <8 7 RK_FUNC_GPIO &pcfg_pull_up>;
};*/
w25q64_wp: w25q64-wp {
rockchip,pins = <7 2 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
}
编译内核,输入如下命令
./build.sh kernel
./build.sh updateimg
6 W25Q64驱动编写
#include 7 编写测试App
#include 8 编译驱动程序和测试APP
8.1 编译驱动程序
KDIR:=/rk3288_linux/rk3288_linux_release_20220607/kernel
obj-m:=w25q64.o
PWD:=$(shell pwd)
all:
$(MAKE) -C $(KDIR) M=$(PWD)
clean:
rm -rf *.ko *.order *.symvers *.cmd *.o *.mod.c *.tmp_versions .*.cmd .tmp_versions
输入如下命令编译出驱动模块文件:
make -j8
![]()
编译成功后会生成一个.ko文件拷贝到开发板上并加载
8.2 编译测试Ap
输入如下命令编译测试 norflashApp.c 这个测试程序:
arm-linux-gnueabihf-gcc norflashApp.c -o norflashApp
编译成功以后就会生成 norflashApp 这个应用程序
8.3 运行测试
编译出来的.ko 和 norflashApp 这两个文件拷贝到/lib/modules/4.4.194目录中,重启开发板,进入目录/lib/modules/4.4.194中输入加载.ko驱动模块:
insmod w25q64.ko

驱动加载成功以后就可以使用norflashApp 软件来测试驱动是否正常,输入如下命令:
./norflashApp /dev/spi
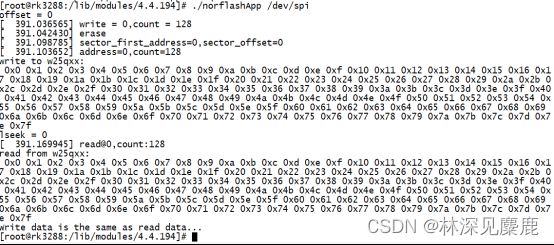
rmmod w25q64.ko //卸载驱动模块
![]()