第七章 图
在图结构中,结点间前驱和后继均可不唯一,即结点之间是多对多的关系
点集合中不能为空,边集合可以为空
图的存储结构:邻接矩阵、邻接表、十字链表及邻接多重表
图的遍历方法:广度优先搜索,深度优先搜索
稠密图:图中具有很多的边(普利姆算法)
稀疏图:图中具有很少的边(克鲁斯卡尔算法)
关键路径:拓扑排序
最短路径:迪杰斯特拉
最小生成树:prime算法,克鲁斯卡尔算法
深度优先搜索:按照深度方向搜索,类似于树的先根遍历(找邻点的邻点直到没有,再回溯)
广度优先搜索:按照广度方向搜索,类似于树的层次遍历(先找一个点的所有邻接点,同时访问,再继续同时访问下一个)
有向图:节点之间的边存在方向
无向图:节点之间的边不存在方向
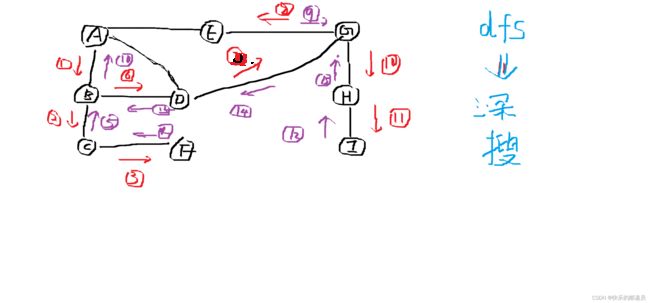
一、dfs
二、bfs

三、拓扑序列

1. 关于图的邻接矩阵,下列哪个结论是正确的?(B)
A.有向图的邻接矩阵总是不对称的
B.有向图的邻接矩阵可以是对称的,也可以是不对称的
C.无向图的邻接矩阵总是不对称的
D.无向图的邻接矩阵可以是不对称的,也可以是对称的
无向图的邻接矩阵一定是对称的;
有向图的邻接矩阵可以是对称的,也可以是不对称的
2. 下面给出的有向图中,各个顶点的入度和出度分别是:(A)
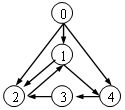
A.入度: 0, 2, 3, 1, 2; 出度: 3, 2, 1, 1, 1
B.入度: 3, 2, 1, 1, 1; 出度: 0, 2, 3, 1, 2
C.入度: 3, 4, 4, 2, 3; 出度: 3, 4, 4, 2, 3
D.入度: 0, 1, 2, 1, 1; 出度: 3, 2, 1, 1, 1
0 入度:0 出度:3
1 入度:2 出度:2
2 入度:3 出度:1
3 入度:1 出度:1
4 入度:2 出度:1
3. 设无向图为 G=(V,E),其中 V={v1,v2,v3,v4},E={(v1,v2),(v3,v4),(v4,v1),(v2,v3),(v1,v3)}。则相应的邻接矩阵为:(B)
A.
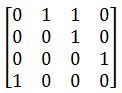
B.
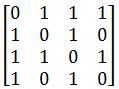
C.

D.
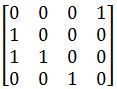
因为为无向图,所以 v1<->v2;v3<->v4;v4<->v1;v2<->v3;v1<->v3;

4. 在图中自d点开始进行深度优先遍历算法可能得到的结果为:(C)

A.d,a,c,f,e,b
B.d,a,e,b,c,f
C.d,e,a,c,f,b
D.d,f,c,e,a,b
d->e,d->f.排除A,B选项
d->f->c(c之后只能选择a,不能没有走完就突然回溯到d)
5. 下列选项中,不是下图深度优先搜索序列的是:(D)
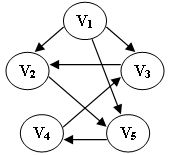
A.V1, V5, V4, V3, V2
B.V1, V3, V2, V5, V4
C.V1, V2, V5, V4, V3
D.V1, V2, V3, V4, V5
D选项中,V2走不到V3
6. 在图中自c点开始进行广度优先遍历算法可能得到的结果为:(C)

A.c,a,b,e,f,d
B.c,a,f,d,e,b
C.c,f,a,d,e,b
D.c,f,a,b,d,e
c a f b d e
c f a d b e
c f a d e b
7. 任何一个带权无向连通图的最小生成树(C)
A.是唯一的
B.是不唯一的
C.有可能不唯一
D.有可能不存在
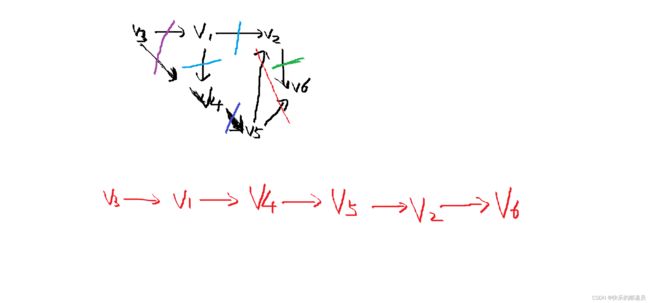
8.已知有向图G=(V, E),其中V = {v1, v2, v3, v4, v5, v6},E = {, , , , , , , } 。G的拓扑序列是:(A)
A.v3, v1, v4, v5, v2, v6
B.v3, v4, v1, v5, v2, v6
C.v1, v3, v4, v5, v2, v6
D.v1, v4, v3, v5, v2, v6
先找入度为0的点,边删边,边找入度为0的点
9. 我们用一个有向图来表示航空公司所有航班的航线。下列哪种算法最适合解决找给定两城市间最经济的飞行路线问题?(A)
A.Dijkstra算法(从顶点v0出发到其余顶点的最短路径算法)
B.Kruskal算法(最小生成素)
C.深度优先搜索(图的遍历)
D.拓扑排序算法(关键路径)
10.数据结构中Dijkstra算法用来解决哪个问题?(B)
A.关键路径
B.最短路径
C.拓扑排序
D.字符串匹配