ROBOGUIDE教程:FANUC机器人摆焊焊接功能介绍与虚拟仿真操作方法
目录
摆焊功能简介
摆焊指令介绍
摆焊功能设置
摆焊条件设置
机器人摆焊示教编程
仿真运行
摆焊功能简介
使用FANCU机器人进行弧焊焊接时,也可以实现摆动焊接(简称摆焊)。
摆焊功能是在机器人弧焊焊接时,焊枪面对焊接方向以特定角度周期性左右摇摆进行焊接,由此来增大焊道宽度,进而提高焊接强度的一种方法。此外,通过电弧传感器功能一边跟随焊道一边进行焊接时,焊枪必须具备摆焊动作。

摆焊指令介绍
FANUC机器人摆焊是通过在程序中添加摆焊指令实现的。
摆焊指令是使得机器人执行摆焊动作的必要指令。摆焊指令由摆焊开始指令与摆焊结束指令组成,使用时二者要成对添加。
机器人在执行摆焊开始指令与摆焊结束指令之间所示教的运动程序语句时,执行摆焊动作。一旦根据摆焊开始指令执行摆焊动作后,直至执行摆焊结束指令为止,机器人会一直进行摆焊动作。
FANUC机器人的摆焊开始指令有两种表现形式。如下图所示,是摆焊开始指令的第一种表现形式。此种表现形式,机器人根据预先设定好的摆焊条件,以指定模式开始摆焊。

如下图所示,是摆焊开始指令的第二种表现形式。在此种表现形式中,可以在指令中直接指定机器人的摆焊条件,如摆焊频率、摆焊振幅、左停留时间、右停留时间。

机器人的摆焊结束指令也有两种表现形式,如下图所示。第一种表现形式,当机器人执行到此条指令时,将结束执行过程中的所有摆焊;第二种表现形式,在程序中控制的动作组为两组以上且程序中存在多个Weave(模式)[ i ]指令的情况下使用,用来结束与摆焊开始条件编号相同的动作组所执行的摆焊。

FANUC机器人的摆焊有五种模式,如下图所示,分别为正弦型摆焊、正弦2型摆焊、圆型摆焊、8字型摆焊与L型摆焊。
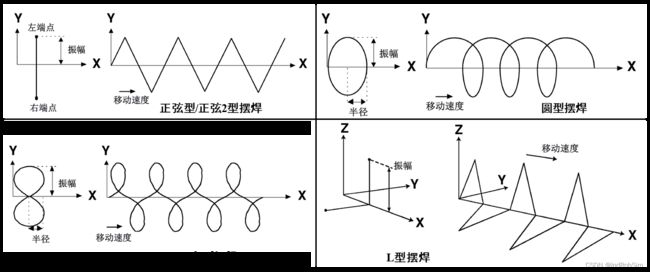
正弦型摆焊:机器人弧焊焊接中标准的摆焊模式,可以与电弧传感器、多层焊接功能进行组合使用。
正弦2型摆焊:机器人的焊接动作与正弦型摆焊相同,可以在高频率(一般为5Hz以上)下进行摆焊动作,动作控制方式与正弦型摆焊不同。通常,与振子型摆焊组合使用。
圆型摆焊:机器人一边画圆一边前进的摆焊模式,主要在搭接接头和具有较大的盖帽的焊接中使用。
8字型摆焊:机器人一边画8字一边前进的摆焊模式,主要在厚板的焊接和表面/外装精磨、提高强度等工况中使用。
L型摆焊:主要在角焊焊接和V坡口焊接中使用,为了与接头相对应,需要事先设置摆焊坐标系和仰角。
摆焊功能设置
摆焊功能设置是FANUC机器人实现摆焊的全局属性设置,所设置(仰角、圆半径除外)的参数会被反映到所有的摆焊动作中,摆焊功能在摆焊设置画面上进行。
在ROBOGUIDE软件中,打开机器人虚拟示教器,然后在操作面板上按“MENU”键,依次选择“设置”→“摆焊”,即可进入摆焊设置界面,如下图所示。

按照实际需要对相关项目进行设置,对于虚拟仿真项目,可以按照下表所示参数进行设置。
| 序号 |
名称 |
设定值 |
| 1 |
摆焊启用组 |
[ 1,*,*,*,*,*,*,* ] |
| 2 |
停留延迟类型 |
移动 |
| 3 |
坐标系类型 |
工具&焊道 |
| 4 |
仰角 |
0deg |
| 5 |
方位角 |
0deg |
| 6 |
中心隆起量 |
0.0mm |
| 7 |
半径 |
0.0mm |
| 8 |
摆焊连接 |
是 |
| 9 |
机器人组 |
1 |
| 10 |
端点输出端口 DO |
0 |
| 11 |
端点输出脉冲宽度 |
0.10sec |
| 12 |
端点输出延迟时间 |
0.08sec |
| 13 |
平滑摆焊 |
禁用 |
在一般的摆焊焊接中,无需对摆焊功能进行参数变更。
摆焊条件设置
摆焊条件用于预先定义机器人在焊接过程中执行摆焊时的摆焊参数。机器人通过摆焊指令中指定的摆焊条件编号,执行摆焊动作。标准情况下可以设置10个摆焊条件,如有特殊需要,摆焊条件最多可以增加至98个。
摆焊条件设置,在摆焊条件画面上进行。在虚拟示教器的操作面板上按“DATA”键,进入摆焊条件一览界面,如下图所示。若是界面不是摆焊条件一览,可以再按“F1 类型”,然后选择“摆焊设定”即可进入。
在摆焊条件一览界面,可以在对应的摆焊条件编号内查看或设置摆焊频率、摆焊振幅、右停留时间与左停留时间。

若是需要设置更加详细的摆焊条件参数,可以先选择相应的摆焊条件编号,然后按“F2 详细”,进入摆焊条件详细设置界面,如下图所示。

按照实际需要对相关项目进行设置,对于虚拟仿真项目,可以按照下表所示参数进行设置。
| 序号 |
名称 |
设定值 |
| 摆焊设定:1 |
||
| 1 |
频率 |
4.0Hz |
| 2 |
振幅 |
4.0mm |
| 3 |
右侧停留 |
0.000sec |
| 4 |
左侧停留 |
0.000sec |
| 5 |
L形摆焊角度 |
90.0deg |
| 6 |
机器人组掩码 |
[ *,*,*,*,*,*,*,* ] |
机器人摆焊示教编程
在FANUC机器人示教器的程序编辑界面中,先编写机器人弧焊焊接程序,然后按“F1 指令”,在弹出的指令菜单中选择“摆焊”,弹出摆焊指令菜单,如下图所示。
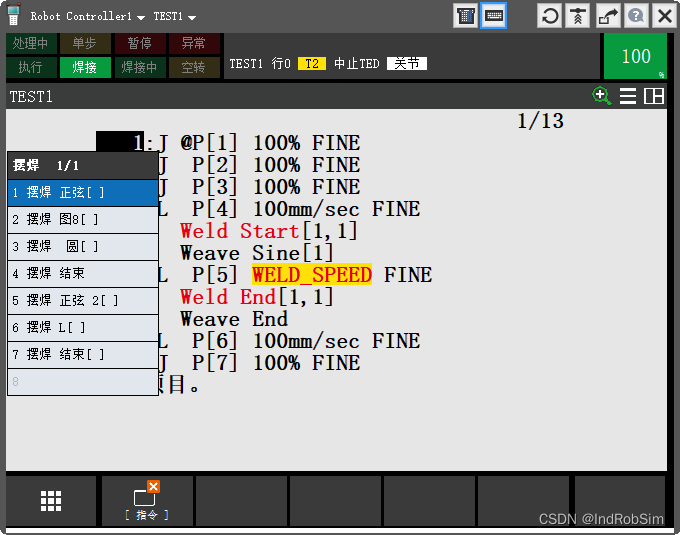
根据实际需求,选择需要的摆焊模式,插入相应的摆焊指令。通常情况下,摆焊开始指令、摆焊结束指令都是分别位于弧焊开始指令与弧焊结束指令之后,如下图所示。

仿真运行
机器人摆焊指令添加完成后,对机器人仿真运行,仿真运行效果如下方动态图所示,可以看到机器人按照设定的摆焊条件实现了摆焊焊接。
The End
上一篇:ROBOGUIDE软件:FANUC机器人多层堆焊功能介绍与示教编程操作方法