IEC60870-5-101协议解析
IEC 60870-5-101(IEC101)是电力系统监测、控制和相关通信的标准,用于电力系统的远程控制、远程保护和相关通信。这与 iec60870-5-1 至 iec60870-5-5 标准完全兼容,并在 DTE 和 DCE 之间使用标准异步串行远程控制信道接口。该标准适用于点对点、星形、多点等多种配置。
平衡式与非平衡式
- 非平衡模式: 从站接收到主站发起的请求时才会进行传输,并只有主站才能发起请求,主站采用顺序查询(召唤)子站。
- 平衡模式:所有站都可启动报文传输,即这些站都可以作为启动站和从动站,这些站被称为综合站。
非平衡是表示通讯双方一主一从关系(一个询问,一个应答),报文发送方向通过 PRM 【控制域中启动报文位】 识别;平衡是表示双方没有主从关系,是对等关系,报文发送方向通过 PRM 识别,双方都可以发起询问(命令),也能应答对方。发起方报文 PRM=1 ,响应方报文PRM=0。在非平衡模式中 PRM 决定了报文传送的方向,PRM=1 表示主站向子站传输报文,PRM=0 表示子站向主站传输报文。
帧格式
每个用户数据(以字节为单位)包含1个启动位、8个数据位、1个奇偶校验位和1个停止位。帧格式有3种。
固定帧格式
| 启动字符 | 控制域 | 链路地址域 | 帧校验和 | 结束字符 |
|---|---|---|---|---|
| 10H | C | A | CS | 16H |
固定帧传输时无应用服务数据单元(ASDU)。
可变帧格式
| 启动字符 | 数据长度 | 数据长度 | 启动字符 | 控制域 | 链路地址域 | 链路用户数据 | 帧校验和 | 结束字符 |
|---|---|---|---|---|---|---|---|---|
| 68H | L | L | 68H | C | A | ASDU | CS | 16H |
可变帧的数据长度有一共有两个,第二个长度是重复前一个,共表现两次。可变帧传输时有应用服务数据单元。
单字节
E5H,否定回答,主要用于终端对接收到错误报文的应答,在平衡式中,主站收到终端错误请求报文时,也可用单字节应答。
ESH,没有召唤的数据。
控制域
控制域用一个字节长度表示,共分为两种,一种是主站至子站,一种是子站到主站。
主站至子站
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
|---|---|---|---|---|---|---|---|
| RES | PRM | FCB | FCV | FUN | FUN | FUN | FUN |
子站至主站
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
|---|---|---|---|---|---|---|---|
| RES | PRM | ACD | DFC | FUN | FUN | FUN | FUN |
-
RES:备用。
-
PRM:启动报文位。PRM=1 表示是由启动站向从动站传输的报文;PRM=0 表示是由从动站(响应方)向启动站传输的报文。
-
FCB:帧计数位。帧计数位是用来消除信息传输的丢失和重复。启动站向同一从动站传输新一轮的发送(确认)或请求(响应)传输服务时,将帧计数位取相反值,启动站为每一个从动站保留一个帧计数位的拷贝,若超时未收到从动站发出的所期望的报文,或接受出现差错,则启动站不改变帧计数位的状态,重复原来的发送(确认)或者请求(影响)服务。从动站接收到复位命令后将帧计数位置零,并期望下一次从启动站到从动站传输的帧中,其帧计数位为1,帧计数有效为(FCV)为1。
-
FCV:帧计数有效位。FCV=0表示帧计数位(FCB)的变化无效。FCV=1表示帧计数位(FCB)的变化有效。发送无回答服务、广播报文和其他不需要考虑信息输出的丢失和重复的传输服务,无需改变帧计数位FCB的状态,因此这些帧计数有效位FCV常为零。
-
ACD:要求访问位。ACD=0表示从动站无1级用户数据要求传输;ACD=1表示从动站要求传输1级用户数据。1级用户数据传输典型被用于事件传输或者高优先级报文的传输;2级用户数据典型被用于循环传输或者低优先级报文传输。
-
DFC:数据流控制位。DFC=0表示从动站可以接收后续报文。DFC=1表示从动站接收后续报文将引起数据溢出。
-
FUN:功能码。
非平衡链路功能码
| 启动方向的功能码和服务 | 启动方向的FCV位状态 | 从动方向所允许的功能码和服务 |
|---|---|---|
| <0>复位远方链路 | 0 | <0>确认:认可;<1>确认:否定认可 |
| <1>复位用户进程 | 0 | <0>确认:认可;<1>确认:否定认可 |
| <3>发送/确认用户数据 | 1 | <0>确认:认可;<1>确认:否定认可 |
| <4>发送/无回答用户数据 | 0 | 无回答 |
| <8>访问请求 | 0 | <11>响应:链路状态 |
| <9>请求/响应请求链路状态 | 0 | <11>响应:链路状态 |
| <10>请求/响应请求1级用户数据 | 1 | <8>响应:用户数据;<9>响应:无所请求的用户数据 |
| <11>请求/响应请求2级用户数据 | 1 | <8>响应:用户数据;<9>响应:无所请求的用户数据 |
链路地址
链路地址选用一个或多个八位位组。链路地址域的含义是当由主站触发一次传输服务,主站向子站传送的帧中表示报文所要传送的目的站址,即子站站址。
当由子站想主站传送帧时,表示该报文发送的源站址,即表示该子站站址。
一般情况下,链路地址域的站地址和应用服务数据单元(ASDU)公共地址可以使同一个值。在某些情况下,在一个链路层地址域的站地址下,可以有好几个应用服务数据单元公共地址,如:一个变电所搜集附近几个卫星站的信息,然后向主站传送。此时在应用服务数据单元公共地址可以有好几个。
应用服务数据单元(ASDU)
应用服务数据单元(ASDU)由数据单元标识符和至少1个信息对象所组成。
| TI | VSQ | COT | CA | 1 | 1 | 1 | … | n | n | n |
|---|---|---|---|---|---|---|---|---|---|---|
| 类型标识 | 可变结构限定词 | 传送原因 | 公共地址 | 信息对象地址 | 信息对象元素集 | 信息对象时标(可选) | … | 信息对象地址 | 信息对象元素集 | 信息对象时标(可选) |
- TI(Type Identification):类型标识,定义了信息对象的结构、类型和格式。
- VSQ(Variable Structure Qualifier):可变结构限定词,信息元素数目,是否顺序。
- COT(Cause Of Transmission):传送原因,表示周期,突发传输,总召唤等。
- CA(Common Address):应用服务数据单元公共地址,关联应用服务数据单元所有对象。
- 信息对象由一个信息对象标识符、一组信息元素和一个信息对象时标(如果出现)所组成。
- 信息对象标识符仅由信息对象地址组成。一组信息元素集可以是单个信息元素/信息元素集合、单个信息元素序列或者信息元素集合序列。
- 一个应用服务数据单元内全部信息对象有相同的结构、类型和格式。
类型标识(TI):
监控方向的过程信息:
| value | describe | symbol |
|---|---|---|
| 1 | Single point information | M_SP_NA_1 |
| 2 | Single point information with time tag | M_SP_TA_1 |
| 3 | Double point information | M_DP_NA_1 |
| 4 | Double point information with time tag | M_DP_TA_1 |
| 5 | Step position information | M_ST_NA_1 |
| 6 | Step position information with time tag | M_ST_TA_1 |
| 7 | Bit string of 32 bit | M_BO_NA_1 |
| 8 | Bit string of 32 bit with time tag | M_BO_TA_1 |
| 9 | Measured value, normalized value | M_ME_NA_1 |
| 10 | Measured value, normalized value with time tag | M_ME_TA_1 |
| 11 | Measured value, scaled value | M_ME_NB_1 |
| 12 | Measured value, scaled value with time tag | M_ME_TB_1 |
| 13 | Measured value, short floating point value | M_ME_NC_1 |
| 14 | Measured value, short floating point value with time tag | M_ME_TC_1 |
| 15 | Integrated totals | M_IT_NA_1 |
| 16 | Integrated totals with time tag | M_IT_TA_1 |
| 17 | Event or protection equipment with time tag | M_EP_TA_1 |
| 18 | Packed start events of protection equipment with time tag | M_EP_TB_1 |
| 19 | Packed output circuit information of protection equipment with time tag | M_EP_TC_1 |
| 20 | Packed single point information with status change detection | M_PS_NA_1 |
| 21 | Measured value, normalized value without quality descriptor | M_ME_ND_1 |
带有长时间标签的过程电报(7个八位字节):
| value | describe | symbol |
|---|---|---|
| 30 | Single point information with time tag CP56Time2a | M_SP_TB_1 |
| 31 | Double point information with time tag CP56Time2a | M_DP_TB_1 |
| 32 | Step position information with time tag CP56Time2a | M_ST_TB_1 |
| 33 | Bit string of 32 bit with time tag CP56Time2a | M_BO_TB_1 |
| 34 | Measured value, normalized value with time tag CP56Time2a | M_ME_TD_1 |
| 35 | Measured value, scaled value with time tag CP56Time2a | M_ME_TE_1 |
| 36 | Measured value, short floating point value with time tag CP56Time2a | M_ME_TF_1 |
| 37 | Integrated totals with time tag CP56Time2a | M_IT_TB_1 |
| 38 | Event or protection equipment with time tag CP56Time2a | M_EP_TD_1 |
| 39 | Packed start events of protection equipment with time tag CP56time2a | M_EP_TE_1 |
| 40 | Packed output circuit information of protection equipment with time tag CP56Time2a | M_EP_TF_1 |
控制方向的过程信息:
| value | describe | symbol |
|---|---|---|
| 45 | Single command | C_SC_NA_1 |
| 46 | Double command | C_DC_NA_1 |
| 47 | Regulating step command | C_RC_NA_1 |
| 48 | Set point command, normalized value | C_SE_NA_1 |
| 49 | Set point command, scaled value | C_SE_NB_1 |
| 50 | Set point command, short floating point value | C_SE_NC_1 |
| 51 | Bitstring 32 bit | C_BO_NA_1 |
带长时间标签的命令电报(7个八位字节):
| value | describe | symbol |
|---|---|---|
| 58 | ( IEC 104 ) Single command with time tag CP56Time2a | C_SC_TA_1 |
| 59 | ( IEC 104 ) Double command with time tag CP56Time2a | C_DC_TA_1 |
| 60 | ( IEC 104 ) Regulating step command with time tag CP56Time2a | C_RC_TA_1 |
| 61 | ( IEC 104 ) Set point command, normalized value with time tag CP56Time2a | C_SE_TA_1 |
| 62 | ( IEC 104 ) Set point command, scaled value with time tag CP56Time2a | C_SE_TB_1 |
| 63 | ( IEC 104 ) Set point command, short floating point value with time tag CP56Time2a | C_SE_TC_1 |
| 64 | ( IEC 104 ) Bitstring 32 bit with time tag CP56Time2a | C_BO_TA_1 |
监控方向的系统信息:
| value | describe | symbol |
|---|---|---|
| 70 | End if initialization | M_EI_NA_1 |
控制方向的系统信息:
| value | describe | symbol |
|---|---|---|
| 100 | (General-) interrogation command | C_IC_NA_1 |
| 101 | Counter interrogation command | C_CI_NA_1 |
| 102 | Read command | C_RD_NA_1 |
| 103 | Clock synchronization command | C_CS_NA_1 |
| 104 | Test command | C_TS_NB_1 |
| 105 | Reset process command | C_RP_NC_1 |
| 106 | Delay acquisition command | C_CD_NA_1 |
| 107 | ( IEC 104 ) Test command with time tag CP56Time2a | C_TS_TA_1 |
控制方向上的参数:
| value | describe | symbol |
|---|---|---|
| 110 | Parameter of measured value, normalized value | P_ME_NA_1 |
| 111 | Parameter of measured value, scaled value | P_ME_NB_1 |
| 112 | Parameter of measured value, short floating point value | P_ME_NC_1 |
| 113 | Parameter activation | P_AC_NA_1 |
文件传输:
| value | describe | symbol |
|---|---|---|
| 120 | File ready | F_FR_NA_1 |
| 121 | Section ready | F_SR_NA_1 |
| 122 | Call directory, select file, call file, call section | F_SC_NA_1 |
| 123 | Last section, last segment | F_LS_NA_1 |
| 124 | Ack file, ack section | F_AF_NA_1 |
| 125 | Segment | F_SG_NA_1 |
| 126 | Directory | F_DR_TA_1 |
| 127 | ( IEC 104 ) QueryLog – Request archive file | F_SC_NB_1 |
可变结构限定词(VSQ):
| Bit7 | Bit6 | Bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
|---|---|---|---|---|---|---|---|
| SQ |
SQ位为0时,表示每个信息元素都给出信息体地址,即地址不连续方式。SQ位为1时,表示应用数据服务单元内有类似的顺序信息元素,例如同一格式的遥测量。在针对元素寻址时只需要根据第一个信息元素的地址,加上后续元素的偏移量即可。
bit0 ~ bit6为信息体对象数目。
传送原因(COT):
| Bit7 | Bit6 | Bit5 | Bit4 | Bit3 | Bit2 | Bit1 | Bit0 |
|---|---|---|---|---|---|---|---|
| T | P/N |
T位为0时表示非测试;T位为1时表示测试。测试位定义了在测试条件下生成的asdu,用于测试传输和设备,而无需控制过程。
P/N 位表示主应用程序功能请求的激活,0为肯定确认,1为否定确认。在不相关的情况下,P/N位为零。
| code | describe | res |
|---|---|---|
| … | ||
| 1 | periodic, cyclic | |
| 2 | background interrogation | |
| 3 | spontaneous | |
| 4 | initialized | init |
| 5 | interrogation or interrogated | req |
| 6 | activation | act |
| 7 | confirmation activation | actcon |
| 8 | deactivation | deact |
| 9 | confirmation deactivation | deactcon |
| 10 | termination activation | actterm |
| 11 | feedback, caused by distant command | |
| 12 | feedback, caused by local command | |
| 13 | data transmission | |
| … | ||
| 20 | interrogated by general interrogation | inrogen |
| 21 | interrogated by interrogation group 1 | |
| 22 | interrogated by interrogation group 2 | |
| 23 | interrogated by interrogation group 3 | |
| 24 | interrogated by interrogation group 4 | |
| 25 | interrogated by interrogation group 5 | |
| 26 | interrogated by interrogation group 6 | |
| 27 | interrogated by interrogation group 7 | |
| 28 | interrogated by interrogation group 8 | |
| 29 | interrogated by interrogation group 9 | |
| 30 | interrogated by interrogation group 10 | |
| 31 | interrogated by interrogation group 11 | |
| 32 | interrogated by interrogation group 12 | |
| 33 | interrogated by interrogation group 13 | |
| 34 | interrogated by interrogation group 14 | |
| 35 | interrogated by interrogation group 15 | |
| 36 | interrogated by interrogation group 16 | |
| 37 | interrogated by counter general interrogation | |
| 38 | interrogated by interrogation counter group 1 | |
| 39 | interrogated by interrogation counter group 2 | |
| 40 | interrogated by interrogation counter group 3 | |
| 41 | interrogated by interrogation counter group 4 | |
| … | ||
| 44 | type-Identification unknown | |
| 45 | cause unknown | |
| 46 | ASDU address unknown | |
| 47 | information object address unknown | |
| … |
远程终端单元
远程终端单元( Remote Terminal Unit,RTU),一种针对通信距离较长和工业现场环境恶劣而设计的具有模块化结构的、特殊的计算机测控单元,它将末端检测仪表和执行机构与远程调控中心的主计算机连接起来,具有远程数据采集、控制和通信功能,能接收主计算机的操作指令,控制末端的执行机构动作。按照国标CB/T 14429 - 93《远动设备及系统术语》中的定义,远动指应用通信技术,完成遥测、遥信、遥控和遥调等功能的总称,简称“四遥”。
传输内容
四遥(遥测、遥信、遥控、遥调)功能是由远动系统终端 RTU(电网调度自动化系统中安装在发电厂、变电站的一种具有四遥远动功能的自动化设备)实现的。
以下是四遥的简单概括:
- 遥测:远程测量传送参数数据;
- 遥信:远程开关量信号测量;
- 遥控:远程对开关控制设备进行控制;
- 遥调:远程对控制量设备进行调试;
遥测
远程测量,被动获得远程信号,测量其数值采集并传送运行参数,包括各种电气量(线路上的电压,电流,功率等量值)和负荷潮流等。远距离对模拟信号进行测量,如测量电压、电流和温度等;分为重要遥测,次要遥测,一般遥测和总加遥测等。遥测功能常用于变压器的有功和无功采集,线路的有功功率采集,母线电压和线路电流采集,温度,压力,流量(流速)等采集,频率采集和其他模拟信号采集。RTU将采集到的厂站运行参数按规约传送给调度中心,如厂站端的功率,电压,电流等。
遥信
远程信号,远距离对开关量信号进行测量,如测量门开关状态、空调是否开机等;遥信信号要求采用无源接点方式,即某一路遥信量的输入应是一对继电器的触点,是闭合或者是断开。通过遥信端子板将继电器触点的闭合或断开转换成为低电平或高电平信号送入RTU 的YX模块,(通常用于测量下列信号,开关的位置信号,变压器内部故障综合信号,保护装置的动作信号,通信设备运行状况信号,调压变压器抽头位置信号,自动调节装置的运行状态信号和其他可提供继电器方式输出的信号,事故总信号及装置主电源停电信号等。)RTU将采集到的厂站设备运行状态按规约传送给调度中心。
遥控
远程控制(远方控制操作),是从调度或监控中心发出命令以实现远方操作和切换。主动发出信号,控制远端操作,接受并执行遥控命令,主要是分合闸,对远程的一些开关控制设备进行远程控制。远距离对设备的开关操作,如开启油机、开关空调等;采用无源接点方式,要求正确动作率不小于99.99%。遥控的正确动作率:不误动的概率,一般拒动不认为是不正确,遥控功能常用于断路器的合、分和电容器以及其它可以采用继电器控制的场合。
遥调
远程调节,接受并执行遥调命令,对远程的控制量设备进行远程调试,如调节发电机输出功率。远距离对模拟量信号值进行设定,如设置空调温度、智能开关电源的均充电压等。 采用无源接点方式,要求其正确率大于99.99%。遥调常用于有载调压变压器抽头的升、降调节和其它可采用一组继电器控制具有分级升降功能的场合。
传输过程
传输之前需要进行初始化:分别有控制站初始化,被控制站初始化和被控制站远方初始化。
初始化过程
- 控制站初始化;
- 被控制站初始化;
- 被控制站被远方初始化;
过程如下:
召唤链路状态 -> 复位RTU -> 召唤链路状态 -> 召唤一级数据
数据级别:
比较重要的为一级数据,各厂家略有不同,一般是指遥信变位,保护动作,召唤数据,遥控等。二级数据一般为循环发送的遥信遥测等。
报文分析
以下报文格式均为16进制。
当通信中断后,主站发出“请求链路状态”,等待与子站建立通信联系。
M->R: 10 49 01 4A 16
M->R: 10 49 01 4A 16
这是请求链路状态,所以是固定帧。
- 启动字符为1个字节:10H
- 控制域为1个字节:49H,二进制为 01001001,PRM=1 表示是由主站向子站传输的报文。FCB位无效。FCV位无效。功能码为9,是请求链路状态。
- 链路地址为1个字节:01H
- 校验码为1个字节:4AH
- 结束字符为1个字节:16H
主站与子站建立通信状态,开始初始化过程,共4个报文。
初始化过程第一步是请求链路状态,并得到子站的响应。
M->R: 10 49 01 4A 16
R->M: 10 0B 01 0C 16
- 控制域:49H,二进制为 01001001,PRM=1 表示是由主站向子站传输的报文。FCB位无效。FCV位无效。功能码为9,是请求链路状态。
- 控制域:0BH,二进制为 00001011,PRM=0 表示是由子站向主站传输的报文。ACD=0表示子站无1级用户数据要求传输。DFC=0表示从动站可以接收后续报文。功能码为B,是响应链路状态。
初始化过程第二步是复位远方链路,并得到子站响应。
M->R 10 40 01 41 16
R->M 10 20 01 21 16
- 控制域:40H,PRM=1 表示是由主站向子站传输的报文。FCB位无效。FCV位无效。功能码为0,是复位远方链路。
- 控制域:20H,PRM=0 表示是由子站向主站传输的报文。ACD=1表示子站要求传输1级用户数据。功能码为0,表示确认。
初始化过程第三部是请求1级数据。
M->R 10 7A 01 7B 16
R->M
- 控制域:7A,二进制为 01111010,PRM=1 表示是由主站向子站传输的报文。FCB=1,主站向同一子站发送新一轮的发送(确认)或请求(响应)传输服务时,将帧计数位取相反值。FCV=1表示帧计数位(FCB)的变化有效。功能码为A,表示召唤一级数据。
- 应答报文:应答报文有3种,否定的单字节报文;子站初始化结束的可变帧报文;无所应答的固定帧报文。
应用报文及数据结构
在进行正常传输前,链路会进行一次初始化,通常来说,初始化过程分为3步进行:初始化,总召和对时。
初始化
非平衡链路中初始化过程:

平衡链路中初始化过程:
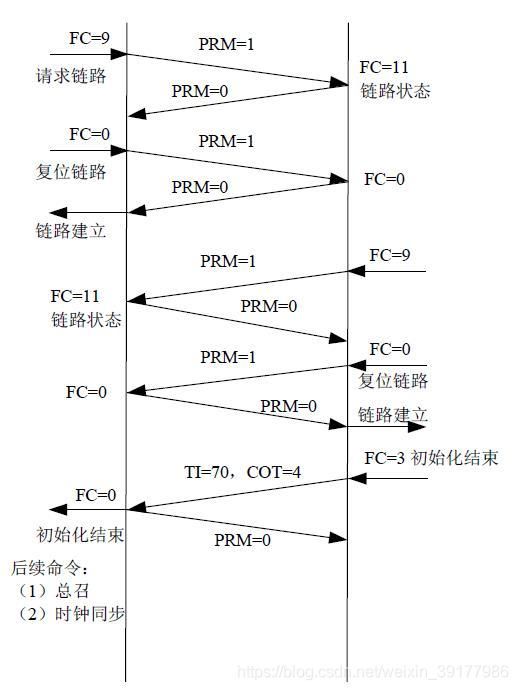
初始化的目的是将传输帧的相关位状态值重置。
总召
非平衡链路传输模式中总召唤过程:
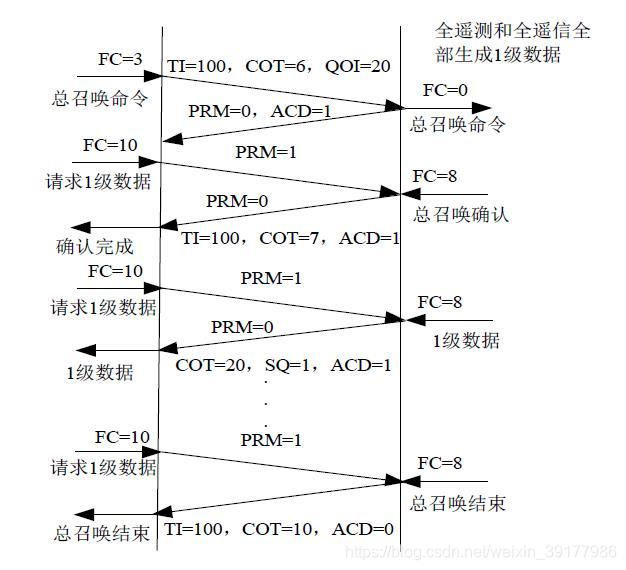
平衡链路传输模式中总召唤过程:

总召的目的是获取从动站的点表与初始化数值。
对时
非平衡链路传输模式中时钟同步过程:
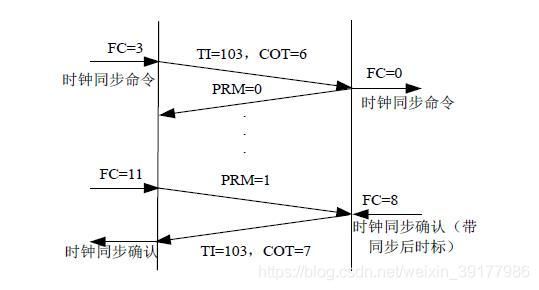
非平衡链路传输模式中时钟读取过程:

对时的目的是将主站本地时间发送到子站进行同步,或者是获取子站时间同步到本地。
信息体地址重用
在监视方向不同的应用服务数据单元可以使用相同信息体地址,即带时标和不带时标两种情况。在信息点的单个状态改变的情况下,具有同样信息对象地址的信息对象可以传输两次,一次不带时标,一次带时标。不带时标的信息对象通常尽可能地优先传输,对于控制站能尽快地反应过程控制是非常有用的。
带时标的信息对象传输优先级比较低,时候用以对时间系列校核。所有信息对象以传送原因3(自发)传送两次。这种模式成为“双传输”。
但在监视方向和控制方向上没有特定组合可以携带同样信息体地址。
限定词
初始化原因:
0:当地电源合上;
1:当地手动复位;
2:远方复位。
召唤限定词:
-
20:站召唤(全局);
-
21:第1组召唤;
-
22:第2组召唤;
…
-
36:第16组召唤。
平衡传输方式报文分析
平衡链路控制域
平衡方式传输控制域与非平衡模式有一些不同:
| bit | bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
|---|---|---|---|---|---|---|---|---|
| 下行 | DIR | PRM | FCB | FCV | FUN | FUN | FUN | FUN |
| 上行 | DIR | PRM | RES | DFC | FUN | FUN | FUN | FUN |
-
DIR=0:表示此帧报文是由主站发出的下行报文
-
DIR=1:表示此帧报文是由终端发出的上行报文。
-
PRM=1 表示此帧报文来自启动站;
-
PRM=0 表示此帧报文来自从动站。
-
DFC=1:表示从动站不能接收后续报文;
-
DFC=0:表示从动站可以接收后续报文。
平衡链路功能码
| 启动方向的功能码和服务 | 启动方向的FCV位状态 | 从动方向所允许的功能码和服务 |
|---|---|---|
| <0>复位远方链路 | 0 | <0>确认:认可;<1>确认:否定认可 |
| <1>复位用户进程 | 0 | <0>确认:认可;<1>确认:否定认可 |
| <2>发送/确认链路测试功能 | 1 | <0>确认:认可;<1>确认:否定认可 |
| <3>发送/确认用户数据 | 1 | <0>确认:认可;<1>确认:否定认可 |
| <4>发送/无回答用户数据 | 0 | 无回答 |
| <9>请求/响应请求链路状态 | 0 | <11>响应:链路状态 |
以下为IEC101平衡方式传输的服务器端的报文,COT长度为1Byte,IOA长度为2Byte,CA长度为2Byte。
//定时向客户端传输请求召唤链路状态报文
2021/3/29 14:21:40: Serial Port 14 : T -> 10 49 01 00 4a 16
2021/3/29 14:21:41: Serial Port 14 : T -> 10 49 01 00 4a 16
2021/3/29 14:21:42: Serial Port 14 : T -> 10 49 01 00 4a 16
2021/3/29 14:21:43: Serial Port 14 : T -> 10 49 01 00 4a 16
//主站发出的下行报文,来自启动站,请求/响应请求链路状态
2021/3/29 14:21:44: Serial Port 14 : T -> 10 49 01 00 4a 16
//终端发出的上行报文,来自从动站,响应:链路状态
2021/3/29 14:21:44: Serial Port 14 : R <- 10 8b 01 00 8c 16
//主站发出的下行报文,来自启动站,复位远方链路
2021/3/29 14:21:45: Serial Port 14 : T -> 10 40 01 00 41 16
//终端发出的上行报文,来自启动站,复位远方链路
2021/3/29 14:21:45: Serial Port 14 : R <- 10 c0 01 00 c1 16
//主站发出的下行报文,来自从动站,确认
2021/3/29 14:21:45: Serial Port 14 : T -> 10 00 01 00 01 16
//主站发出的下行报文,来自启动站,请求复位远方链路
2021/3/29 14:21:45: Serial Port 14 : T -> 10 40 01 00 41 16
//终端发出的上行报文,来自从动站,确认
2021/3/29 14:21:45: Serial Port 14 : R <- 10 80 01 00 81 16
//主站发出的下行报文,来自启动站,发送/确认用户数据,链路地址为1,初始化结束,地址不连续方式,非测试,初始化,CA为1,IOA为0。
2021/3/29 14:21:45: Serial Port 14 : T -> 68 0b 0b 68 73 01 00 46 01 04 01 00 00 00 00 c0 16
//终端发出的上行报文,来自启动站,请求/响应请求链路状态
2021/3/29 14:21:45: Serial Port 14 : R <- 10 c9 01 00 ca 16
//主站发出的下行报文,来自从动站,响应:链路状态
2021/3/29 14:21:45: Serial Port 14 : T -> 10 0b 01 00 0c 16
//终端发出的上行报文,来自启动站,发送/确认用户数据,TI=100(召唤命令),COT=6,QOI=20,CA为0xff,IOA为0
2021/3/29 14:21:45: Serial Port 14 : R <- 68 0b 0b 68 f3 01 00 64 01 06 ff ff 00 00 14 71 16
//主站发出的下行报文,来自从动站,确认
2021/3/29 14:21:45: Serial Port 14 : T -> 10 00 01 00 01 16
//终端发出的上行报文,来自从动站,确认
2021/3/29 14:21:45: Serial Port 14 : R <- 10 80 01 00 81 16
//主站发出的下行报文,来自启动站,发送/确认用户数据,TI=1(单点信息),COT=3(突发/自发),CA=1,IOA=1,信息为1
2021/3/29 14:21:45: Serial Port 14 : T -> 68 0b 0b 68 53 01 00 01 01 03 01 00 01 00 01 5c 16
///终端发出的上行报文,来自启动站,发送/确认用户数据,TI=101(反询问命令),COT=6(激活),CA=0XFF,IOA=0,
2021/3/29 14:21:45: Serial Port 14 : R <- 68 0b 0b 68 f3 01 00 65 01 06 ff ff 00 00 05 63 16
//主站发出的下行报文,来自从动站,确认
2021/3/29 14:21:45: Serial Port 14 : T -> 10 00 01 00 01 16
//终端发出的上行报文,来自从动站,确认
2021/3/29 14:21:45: Serial Port 14 : R <- 10 80 01 00 81 16
//主站发出的下行报文,来自启动站,发送/确认用户数据,TI=100(召唤命令),COT=7(激活确认),QOI=20,CA为1,IOA为0
2021/3/29 14:21:45: Serial Port 14 : T -> 68 0b 0b 68 73 01 00 64 01 07 01 00 00 00 14 f5 16
///终端发出的上行报文,来自启动站,DFC=1,发送/确认用户数据,TI=103(时钟同步及读取命令),COT=6(激活),CA为0xff,IOA为0,信息为:e5 b0 15 0e 1d 03 15
2021/3/29 14:21:45: Serial Port 14 : R <- 68 11 11 68 d3 01 00 67 01 06 ff ff 00 00 e5 b0 15 0e 1d 03 15 2d 16
解析:
b0 e5: -> 45,285毫秒
15 -> 21分
0e -> 14时
1d -> 29日
03 -> 3月
15 -> 21年
//主站发出的下行报文,来自从动站,确认
2021/3/29 14:21:45: Serial Port 14 : T -> 10 00 01 00 01 16
//终端发出的上行报文,来自从动站,确认
2021/3/29 14:21:46: Serial Port 14 : R <- 10 80 01 00 81 16
//主站发出的下行报文,来自启动站,DFC=1,发送/确认用户数据,TI=103(时钟同步及读取命令),COT=7(激活确认)CA为0x01,IOA为0
2021/3/29 14:21:46: Serial Port 14 : T -> 68 11 11 68 53 01 00 67 01 07 01 00 00 00 e5 b0 15 0e 1d 03 15 b1 16
//终端发出的上行报文,来自从动站,确认
2021/3/29 14:21:46: Serial Port 14 : R <- 10 80 01 00 81 16
///主站发出的下行报文,发送/确认用户数据,TI=1(单点信息),COT=20(一般讯问)CA为0x01,IOA为0x01,信息元素为1
2021/3/29 14:21:46: Serial Port 14 : T -> 68 0b 0b 68 73 01 00 01 01 14 01 00 01 00 01 8d 16
//终端发出的上行报文,来自从动站,确认
2021/3/29 14:21:46: Serial Port 14 : R <- 10 80 01 00 81 16
//主站发出的下行报文,发送/确认用户数据,TI=100(召唤命令),COT=7(激活确认),QOI=20
2021/3/29 14:21:46: Serial Port 14 : T -> 68 0b 0b 68 53 01 00 64 01 0a 01 00 00 00 14 d8 16
//终端发出的上行报文,来自从动站,确认
2021/3/29 14:21:46: Serial Port 14 : R <- 10 80 01 00 81 16
//主站发出的下行报文,发送/确认用户数据,TI=101(反询问命令)COT=7(激活确认)
2021/3/29 14:21:46: Serial Port 14 : T -> 68 0b 0b 68 73 01 00 65 01 07 01 00 00 00 05 e7 16
//终端发出的上行报文,来自从动站,确认
2021/3/29 14:21:46: Serial Port 14 : R <- 10 80 01 00 81 16
//主站发出的下行报文,发送/确认用户数据,TI=101(反询问命令),COT=10(激活终止)
2021/3/29 14:21:46: Serial Port 14 : T -> 68 0b 0b 68 53 01 00 65 01 0a 01 00 00 00 05 ca 16
//终端发出的上行报文,来自从动站,确认
2021/3/29 14:21:46: Serial Port 14 : R <- 10 80 01 00 81 16
2021/3/29 14:21:46: Serial Port 14 : R <- 10 80 01 00 81 16
//主站发出的下行报文,发送/确认链路测试功能
2021/3/29 14:22:46: Serial Port 14 : T -> 10 72 01 00 73 16
///因为连接断开,所以没有应答报文
//定时向客户端传输请求召唤链路状态报文
2021/3/29 14:22:49: Serial Port 14 : T -> 10 49 01 00 4a 16
2021/3/29 14:22:51: Serial Port 14 : T -> 10 49 01 00 4a 16
2021/3/29 14:22:52: Serial Port 14 : T -> 10 49 01 00 4a 16
2021/3/29 14:22:53: Serial Port 14 : T -> 10 49 01 00 4a 16
2021/3/29 14:22:54: Serial Port 14 : T -> 10 49 01 00 4a 16
2021/3/29 14:22:55: Serial Port 14 : T -> 10 49 01 00 4a 16
2021/3/29 14:22:56: Serial Port 14 : T -> 10 49 01 00 4a 16
以上报文没有按照平衡式报文原理图显示的收发顺序打印,是因为两边的设备是并行处理所收到的报文的,所以除了前两包报文遵循阻塞规则外,其他报文都是在接收到对方所发送的报文后,设备自身处理完后直接发送出去,没有阻塞关系。
信息体元素
带品质描述词的单点信息(SIQ)
- SIQ占一个字节
- bit1表示遥信状态,bit5-bit8表示品质描述。
- 用于带品质描述不带时标的单点遥信。
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
|---|---|---|---|---|---|---|---|
| IV | NT | SB | BL | RES | RES | RES | SPI |
- SPI为单点遥信状态(0->分,1->合)
- RES为保留位(0)
- BL为封锁标志(0->未封锁,1->封锁)
- SB取代标志(0->未被取代,1->被取代)
- NT为刷新标志(0当前值,1->非当前值)
- IV为有效标志(0->有效,1->无效)
带品质描述词的双点信息(DIO)
- SIQ占一个字节
- bit1、bit2 表示遥信状态,bit5-bit8表示品质描述。
- 用于带品质描述不带时标的双点遥信。
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
|---|---|---|---|---|---|---|---|
| IV | NT | SB | BL | RES | RES | DPI | DPI |
- DPI为双点遥信状态(1->分,2->合,0/3->不确定)
- RES为保留位(0)
- BL为封锁标志(0->未封锁,1->封锁)
- SB取代标志(0->未被取代,1->被取代)
- NT为刷新标志(0当前值,1->非当前值)
- IV为有效标志(0->有效,1->无效)
带变位检索信息的单点遥信变位信息(SCD)
- 每组5个字节
- 字节1-2是连续的16位遥信状态
- 字节3-4是对应的变位标志,1表示变位,0表示未变位
- 字节5保留不用,默认为0
遥测信息
品质描述词(QDS)
- QDS占1个字节
- bit1,bit5-8品质描述
- 用于遥测信息的品质描述
| bit7 | bit6 | bit5 | bit4 | bit3 | bit2 | bit1 | bit0 |
|---|---|---|---|---|---|---|---|
| IV | NT | SB | BL | RES | RES | RES | OV |
- OV为溢出标志(0->未溢出,1->溢出)
- RES为保留位(0)
- BL为封锁标志(0->未封锁,1->封锁)
- SB取代标志(0->未被取代,1->被取代)
- NT为刷新标志(0当前值,1->非当前值)
- IV为有效标志(0->有效,1->无效)
遥测信息体元素
归一化值(NVA)
标度化值
短浮点数
标准为:R32-IEEE STAD 754