百度Apollo五步入门自动驾驶:Dreamview与离线数据包分析(文末赠送apollo周边)

⛳️ 粉丝福利活动
-
✅参与方式:通过连接报名观看课程,即可免费获取精美周边
-
⛳️活动链接:《自动驾驶新人之旅》
-
活动时间长期有效 | 课程姓名填写
鸽芷咕学号1111
完成后加博主微信填写问卷领取礼品,也可根据《活动步骤》 完成领取
注:可以拉取进度条观看,超过%50即可领取百度周边

⛳️ 文章末尾扫码加入粉丝群,不定期发放粉丝福利,各种专业书籍免费赠送!
文章目录
- ⛳️ 粉丝福利活动
- 前言
-
- 步骤一:安装Apollo
- 步骤二:获取离线数据包
- 步骤三:启动Dreamview
- 步骤四:播放和分析数据包
- 步骤五、在Dreamview中分析数据
- 结语
前言
动驾驶技术正以前所未有的速度发展,而百度Apollo作为自动驾驶领域的先驱之一,为开发者提供了一套全面的工具和框架。本文将介绍如何通过百度Apollo的Dreamview工具,结合播放和分析离线数据包,快速入门自动驾驶开发的第一步。
步骤一:安装Apollo
首先,确保你已成功安装了百度Apollo。可以在官方文档中找到详细的安装指南。安装完成后,确保所有依赖项和环境都已正确配置。
 注:具体安装教程官网有详细教程哦!
注:具体安装教程官网有详细教程哦!
- 官网链接:https://apollo.baidu.com

步骤二:获取离线数据包
进入 Apollo Docker 环境
#输入以下命令进入 Apollo
cd /apollo
继续输入以下命令进入 Apollo Docker 环境:
./apollo.sh
如果您的终端如下面所示,说明您成功进入了 Apollo 的运行容器:
[user@in-runtime-docker:/apollo]$
image.png
启动 DreamView
在同一个终端,输入以下命令,启动 Apollo 的 DreamView 程序。
bash scripts/bootstrap.sh
下载 Apollo 的演示包
Record 是 Apollo 记录数据的一种数据格式,以 .record 为后缀的文件就是我们说的 record 数据包。
- 在命令行中,输入下面的命令,下载 record 数据包。您可以直接用鼠标选择:
wget https://apollo-system.cdn.bcebos.com/dataset/6.0_edu/demo_3.5.record
播放 Apollo 的演示包
cyber_recorder play -f demo_3.5.record --loop
选项 --loop 用于设置循环回放模式。
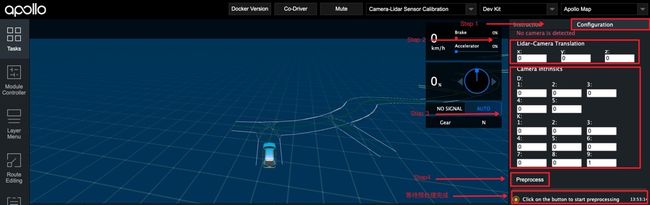
使用 DreamView 查看数据包
在浏览器中输入 http://localhost:8888,访问 Apollo DreamView:
dv_trajectory.png
如果一切正常,可以看到一辆汽车在 DreamView 里移动。

步骤三:启动Dreamview
Dreamview是Apollo的可视化工具,可以用于模拟、可视化和分析自动驾驶系统的运行情况。通过以下命令启动Dreamview:
./scripts/bootstrap.sh
./scripts/dreamview.sh
等待Dreamview启动完成,并确保浏览器中能够访问Dreamview的Web界面。

步骤四:播放和分析数据包
成功导入数据包后,你可以点击“Start Playback”按钮开始播放离线数据。Dreamview将模拟自动驾驶系统的运行,并在地图上显示车辆轨迹、传感器数据等信息。
使用以下命令播放离线数据包:
./bazel-bin/modules/tools/playback/play
确保你已将数据包的路径传递给播放器。Dreamview将开始模拟播放传感器数据。
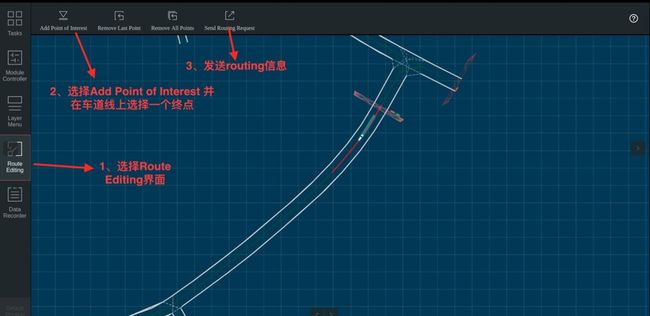
步骤五、在Dreamview中分析数据
现在,回到Dreamview的控制面板,你将看到模拟的车辆在地图上移动。利用Dreamview的分析工具,你可以查看传感器数据、车辆轨迹、感知模块的输出等。
结语
通过Dreamview提供的各种工具和界面,你可以深入分析离线数据,包括车辆行为、传感器反馈、路径规划等方面的信息。
通过以上五个简单步骤,你已经成功使用Dreamview播放并分析了离线数据包。这是进入百度Apollo自动驾驶开发的第一步,为后续的开发和调试奠定了基础。在接下来的学习过程中,你将有机会深入了解更多自动驾驶技术,并逐步应用到实际项目中。祝你在自动驾驶领域取得成功!