NXP应用随记(六):S32K3xx的时钟与PIN简介
目录
1、S32K3基础时钟
1.1、关键功能
1.2、时钟产生模块
1.3、系统时钟
1.4、模式输入模块
1.5、时钟监控模块
2、S32DS时钟与外设配置工具
2.1、创建一个PIT模块
3、IO配置
3.1、IO资源分析
3.2、IO配置工具
1、S32K3基础时钟

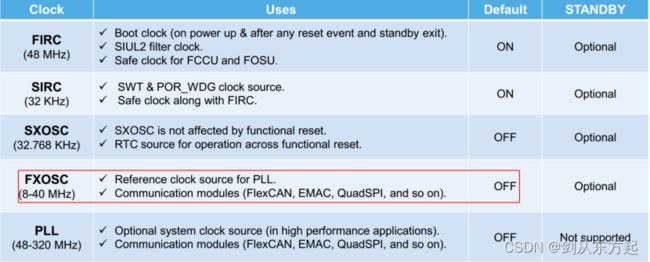
S32K3有五个时钟源
1、快速内部 RC 晶振 (FIRC) – Default. (S32K312 -- 48M)
2、慢速内部 RC 晶振 (SIRC)(S32K312 -- 32M)
3、快速外部晶体振荡器(FXOSC)(S32K312 -- 32M)
4、慢速外部晶体振荡器(SXOSC)(S32K312 -- 32.768K)
5、锁相环(S32K312 --120M)
时钟监控单元
1、频率检查(CMU_FC)。
2、频率计算(CMU_FM)。

各个时钟的用途、是否开启、低功耗模式时候开启如下
1.1、关键功能
FIRC & SIRC
-在RUN模式下始终启用
-状态寄存器提供当前的运行状态
-安全时钟用于安全相关应用的模块,负责检测和响应不正确的芯片操作。
FXOSC & SXOSC
-时钟门控由MC_ME。
-显示当前状态的状态寄存器(提供稳定的时钟、关或其输出时钟不稳定。)
-支持(晶体输入方式、Bypass 模式)
-可配置稳定计数器值。
-FXOSC:可配置的放大器跨导。
控制 PLL 的用户界面系统。
-可编程调频。
-锁相环输出上的多个整数分频器。
-锁检测电路报告当锁相环达到频率锁定。
-持续监控锁状态,报告锁丢失(LOL)状况。

1.2、时钟产生模块

为所有芯片块生成参考时钟。
功能点:
-片上资源的sw可配置多路复用器和分频器。
-渐进式时钟频率切换 (PCFS),可最大限度地降低时钟源切换时功耗突变的影响。
-在同一时间更新MUX内所有时钟分频器的公共触发器
-当改变时钟多路复用器的时钟选择时,无故障时钟转换。

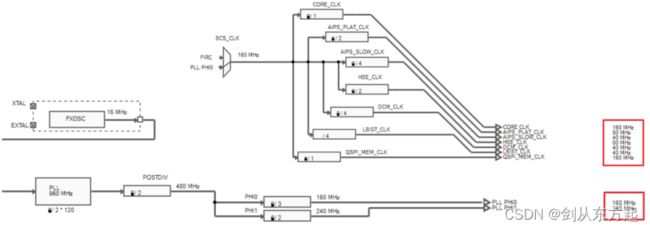
1.3、系统时钟


1.4、模式输入模块

提供核心和外围时钟门控。
每个IP分配给a
•分区(PRTN)和a
•收集功能块(COFB)。
并且有自己的时钟启用器(CLKEN)。
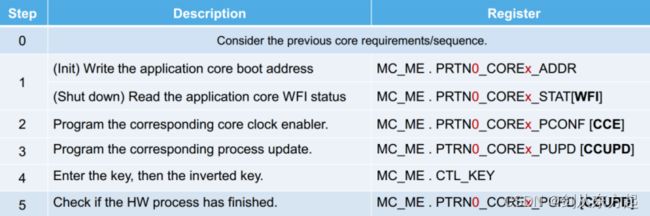
MC_ME模块支持一种机制,通过简单的键写入序列启动预配置的硬件进程
在使用外设之前,请打开其时钟。

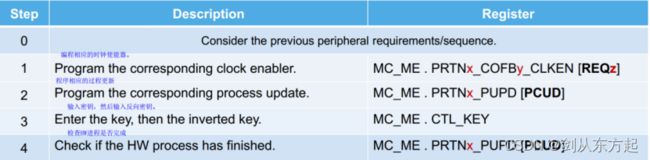

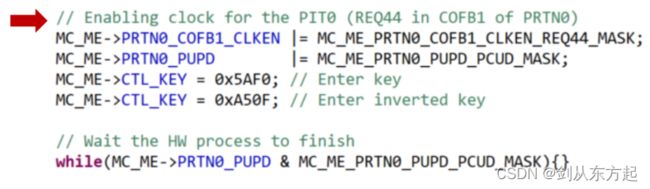
可以在同一个硬件进程中启用/禁用多个外设/内核。
应用程序核心时钟由单个MC_ME核心时钟使能位进行门控。
对于HSE核心,没有时钟控制。
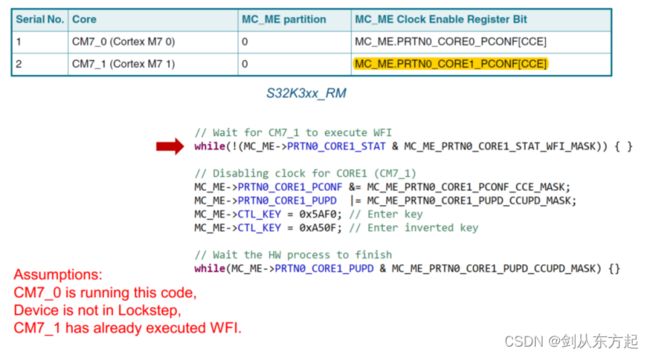
禁止CM7_1时钟
1.5、时钟监控模块
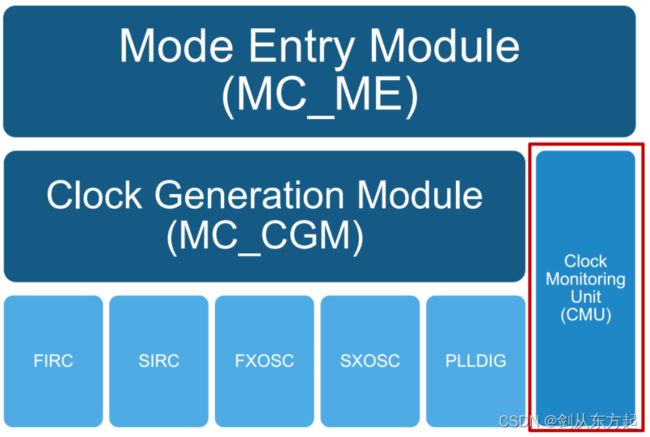
该块由六个监视器组成,报告时钟系统中的故障。

2、S32DS时钟与外设配置工具
2.1、创建一个PIT模块
创建一个应用程序,其中PIT_0 (CH0)每秒产生一个中断(由AIPS_SLOW_CLK @ 40 MHz时钟)。

-启动S32DS所需的工作空间。
-File -> New -> S32DS Application Project.
-输入项目名称,选择目标处理器(S32K344)。单击Next。
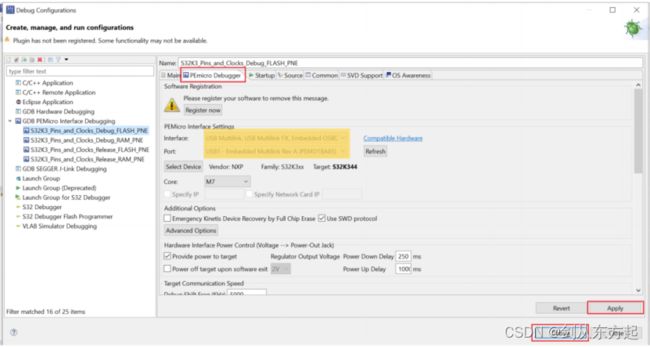
-选择要使用的调试器(pemmicro)和最新的SDK。
-点击完成


请注意,SDK可能会根据RTD版本而更改。选择最新版本。
-展开、双击
-或者点击顶部栏的“打开S32配置”,选择“打开时钟”。

如下配置点

让我们像参考手册(RM)一样配置选项A(高性能模式),使用来自EVB的16 MHz晶体。
-在关系图视图中向下滚动并启用PIT0_CLK(由AIPS_SLOW_CLK计时)
-打开功能组属性
-并检查调用默认…选项。

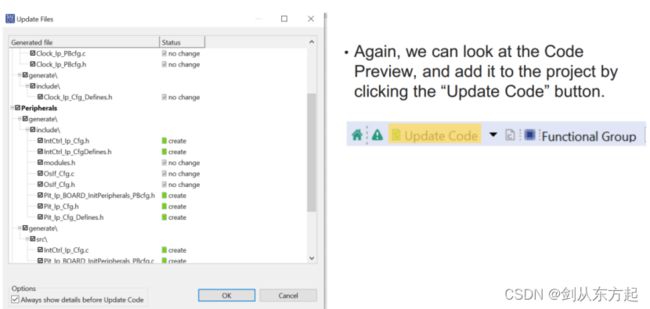
在代码预览选项卡中,您可以看到这些文件
要将它们添加到应用程序项目中,请单击Update Code按钮。
![]()
回到C/ c++透视图。

代码将在board文件夹下提供。
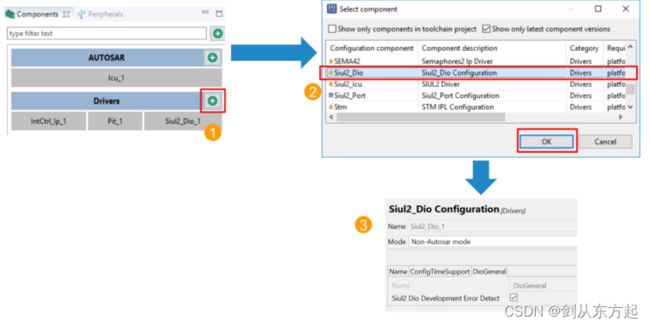
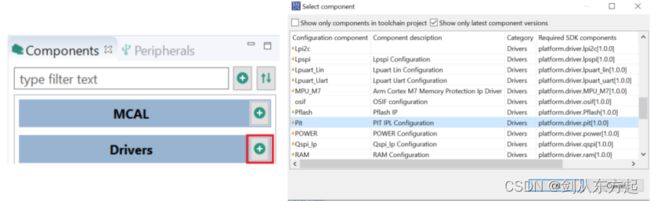
-PIT配置需要一个类似的过程。
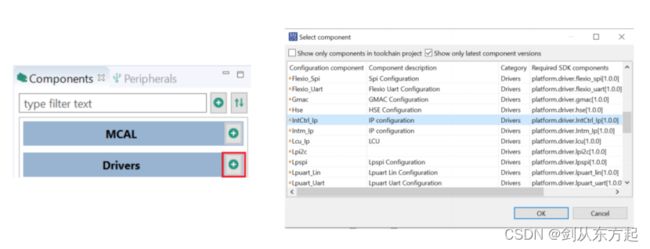
-打开外围设备配置工具并添加一个新的组件。
-向下滚动并选择PIT驱动程序

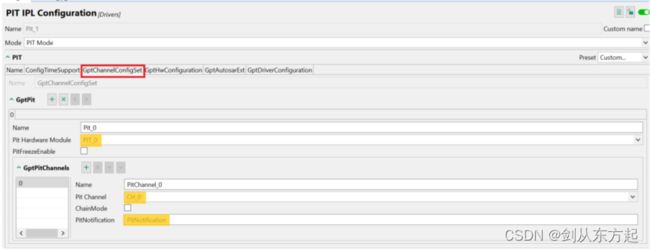
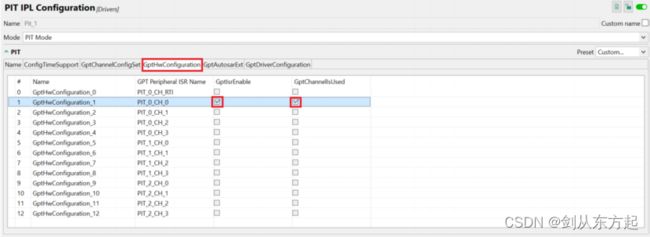
使用“+”图标添加一个新的PIT实例和通道,然后选择PIT_0实例,通道0,启用中断并命名您的PIT回调。
使用“+”图标添加一个新的PIT实例和通道,然后选择PIT_0实例,通道0,启用中断并命名您的PIT回调。
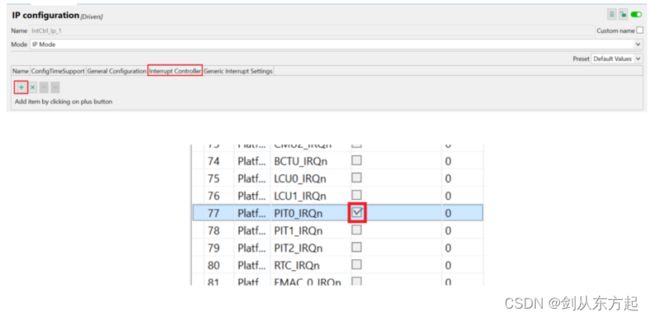
我们还需要为这个项目添加“IntCtrl_Ip”组件。
然后,向下滚动并启用PIT0_IRQn
打开main.c文件,包含必要的头文件。
#include "Mcal.h"
#include "Clock_Ip.h"
#include "Pit_Ip.h"
#include "IntCtrl_Ip.h"
下面是宏/全局变量
extern ISR(PIT_0_ISR);
#define CH_0 ((uint8)0) /*!< PIT channel used - 0 */
#define PIT_INST 0U /*!< PIT instance used - 0 */
#define PIT_PERIOD 40E6 /*!< PIT timeout period - equivalent to 1sec */
volatile uint32 PitCounter;
写PIT的回调函数
void PitNotification (void)
{
PitCounter++;
}
并具有时钟、中断、PIT配置在内的主要功能
volatile int exit_code = 0;
int main (void)
{
/* Clocks Configuration */
Clock_Ip_Init(&Mcu_aClockConfigPB[0]);
/* Interrupt Configuration */
IntCtrl_Ip_InstallHandler(PIT0_IRQn, PIT_0_ISR, NULL_PTR);
IntCtrl_Ip_Init(&IntCtrlConfig_0);
/* PIT0 (CH0) Configuration */
Pit_Ip_Init(PIT_INST, &PIT_0_InitConfig_PB);
Pit_Ip_InitChannel(PIT_INST, PIT_0_CH_0);
Pit_Ip_EnableChannelInterrupt(PIT_INST, CH_0);
Pit_Ip_StartChannel(PIT_INST, CH_0, PIT_PERIOD);
for(;;) {}
return exit_code;
}构建应用程序(单击锤子图标)。
调试应用程序(单击bug图标)。

在调试应用程序之前,请记住连接板(EVB)
在PitNotification回调中放置一个断点。
在Expression选项卡下,添加PitCounter变量,这样您就可以看到它的值变化。
运行应用程序(单击播放图标)。

3、IO配置
3.1、IO资源分析
S32K3x4最多有220个gpio,分为7个端口组(PTA、PTB、PTC、PTD、PTE、PTF和PTG),分配到一个I/O电源域(VDD_HV_A或VDD_HV_B)。
pad有四种类型:

各pad的属性请参见RM附带的S32K3xx_IOMUX.xlsx的“IO信号表”页签。

S32K3xx_IOMUX.xlsx列描述如下:
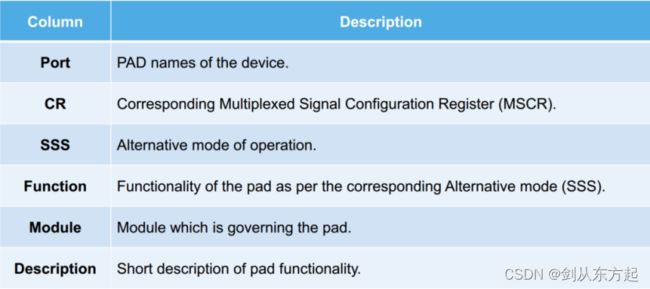
S32K3xx_IOMUX.xlsx列描述如下:

32K3xx端口分配如下所示

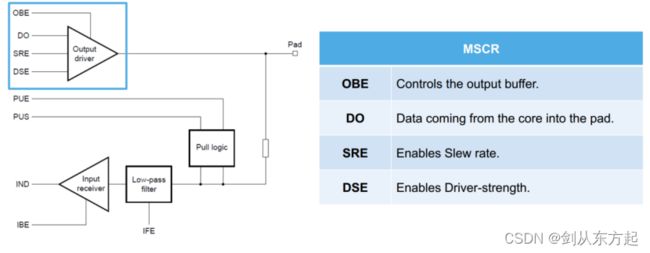
MSCR:多路信号控制寄存器
系统有四个可能的中断向量可用于SIUL2中的REQ引脚,32个中断请求源映射如下所示。
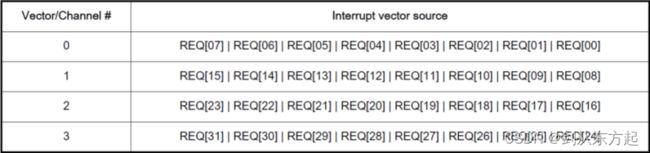
设备上的REQ引脚映射到独立的DMA请求通道。
32个IRQ输入路由到4个Int向量。
每个IRQ输入可以检测上升/下降沿或两个边。
每个IRQ输入包括可配置的故障滤波器。

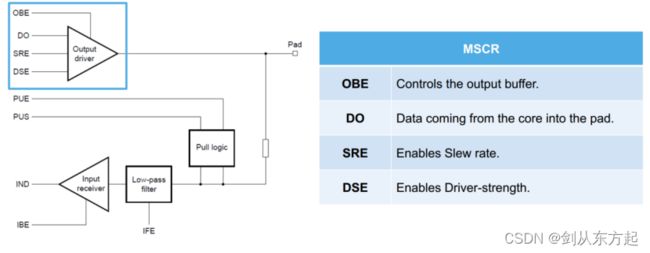
启用/禁用内部拉电阻。
选择下拉或上拉。

对于输入选择,有另一个专用寄存器:IMCR,其中SSS字段必须根据S32K3xx_IOMUX.xlsx配置。
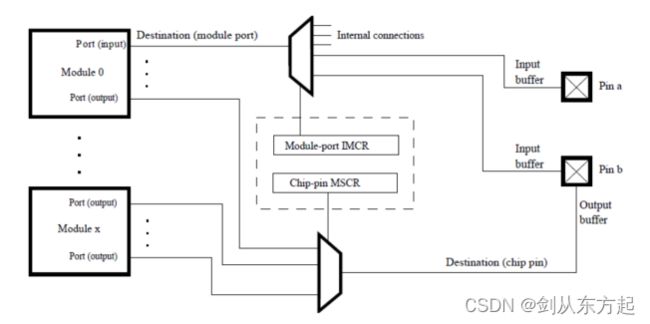
“CR”编号0到511对应于MSCR寄存器实例。
“CR”编号512 ~ 1023对应于IMCR寄存器实例。

SIUL2为所有焊盘提供单独的数据输入和数据输出寄存器。
数据输出寄存器支持读和写操作。
数据输入寄存器只支持读访问。
当将pad配置为使用其备选功能之一时,数据输入值反映pad的相应值,写入操作不影响pad状态。

3.2、IO配置工具
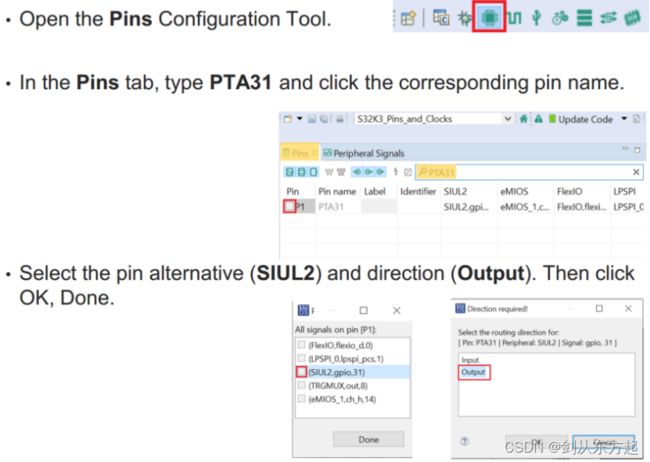
在路由引脚选项卡中,您可以继续配置引脚的电气特性,例如拉电阻,驱动强度或焊盘保持。
建议使用标识符字段为每个引脚提供有意义的ID。

配置所有所需引脚后。转到外设视图并添加Siul2_Port驱动程序。
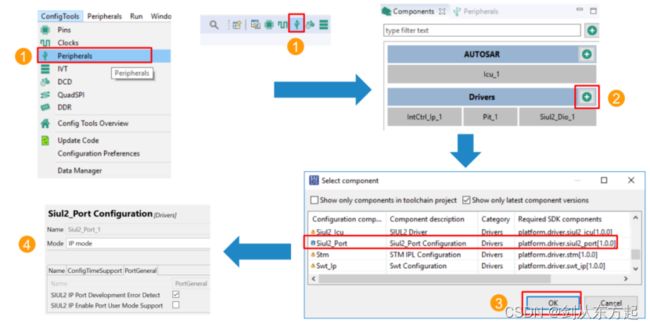
Siul2_Dio驱动程序具有数字输入/输出引脚的必要功能