异步通知
文章目录
- 一、异步通知
-
- 1、应用场景
- 2、执行流程(基于读取按键值的情景)
-
- 2.1、应用程序具体做什么?
- 2.2、驱动程序具体做什么?
- 三、程序
-
- 1、驱动程序
- 2、测试应用程序
- 三、总结
一、异步通知
1、应用场景
当应用程序不想休眠时,可以使用异步通知的方式;当驱动程序有数据时主动通知应用程序,应用程序收到信号后执行信息处理函数。
2、执行流程(基于读取按键值的情景)
大致思想:驱动程序会发送信号给应用程序,应用程序收到信号会执行指定函数;
应用程序使用的关键函数:
- sighandler_t signal(int signum, sighandler_t handler)
- int fcntl(int fd, int cmd, … /* arg */ )
驱动程序使用的关键函数:
- int fasync_helper(int fd, struct file * filp, int on, struct fasync_struct **fapp)
- void kill_fasync(struct fasync_struct **fp, int sig, int band)
2.1、应用程序具体做什么?
以下涉及的函数并不是函数原型,而是从实际程序里复制出来的;以下步骤序号和上图序号无关联;
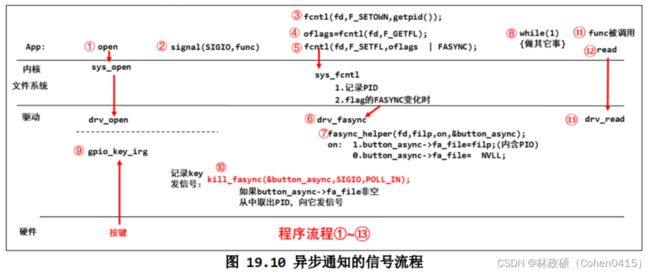
①、应用程序需要使用 signal(SIGIO, func) 函数绑定信号与函数,这样收到驱动程序发送的信号后func()函数会自动执行,读按键操作就在func()函数里完成;
②、那驱动程序到底发送信号给谁是由 fcntl(fd, F_SETOWN, getpid()) 函数决定,这个函数是把应用程序的pid告诉驱动程序;
③、随后使用 flags = fcntl(fd, F_GETFL) 来获取标志位;再通过 fcntl(fd, F_SETFL, flags | FASYNC) 启动fasync功能,启用fasync功能实际上就会调用驱动层的drv_fasync()函数,下面介绍drv_fasync();
2.2、驱动程序具体做什么?
以下涉及的函数并不是函数原型,而是从实际程序里复制出来的;以下步骤序号和上图序号无关联;
①、驱动程序里需要实现drv_fasync()函数,而该函数里只需要调用 fasync_helper(fd, file, on, &button_fasync) 函数,button_fasync是一个fasync_struct类型的结构体,里面会存放应用程序的pid,后续发送信号时也会用到button_fasync;
②、信号的发送在按键中断程序里,调用 kill_fasync(&button_fasync, SIGIO, POLL_IN) 发送信号;
三、程序
1、驱动程序
#include 2、测试应用程序
#include \n" , argv[0]);
return -1;
}
signal(SIGIO, sig_func); //绑定信号与函数
/* 2. 打开文件 */
fd = open(argv[1], O_RDWR);
if (fd == -1)
{
printf("can not open file %s\n", argv[1]);
return -1;
}
fcntl(fd, F_SETOWN, getpid()); //传入应用程序pid
flags = fcntl(fd, F_GETFL); //获取flags
fcntl(fd, F_SETFL, flags | FASYNC); //启动fasync功能,驱动程序的key_drv_fasync()会被调用
/* 3. 写文件 */
while(1)
{
printf("asyn button test\n");
sleep(2);
}
close(fd);
return 0;
}
三、总结
1、以上专业术语或名词解释有个人理解,感谢指点纠错!
2、视频学习B站韦东山:【第5篇】嵌入式Linux驱动开发基础知识 - 异步通知