20231229在Firefly的AIO-3399J开发板的Android11使用挖掘机的DTS配置单前后摄像头ov13850
20231229在Firefly的AIO-3399J开发板的Android11使用挖掘机的DTS配置单前后摄像头ov13850
2023/12/29 11:10
开发板:Firefly的AIO-3399J【RK3399】
SDK:rk3399-android-11-r20211216.tar.xz【Android11】
Android11.0.tar.bz2.aa【ToyBrick】
Android11.0.tar.bz2.ab
Android11.0.tar.bz2.ac
https://wiki.t-firefly.com/AIO-3399J/prepare_compile_android.html
AIO-3399J产品规格书 立即购买
AIO-3399J 采用 RK3399 六核(A72x2+A53x4) 64 位处理器,主频高达1.8GHz,集成了四核 Mali-T860 GPU,性能优异。
1、简略步骤:
rootroot@rootroot-X99-Turbo:~/3TB$ cat Android11.0.tar.bz2.a* > Android11.0.tar.bz2
rootroot@rootroot-X99-Turbo:~/3TB$ tar jxvf Android11.0.tar.bz2
rootroot@rootroot-X99-Turbo:~/3TB$ mv Android11.0 64rk3399-android-11
rootroot@rootroot-X99-Turbo:~/3TB$ cd 64rk3399-android-11
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ cd u-boot
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11/u-boot$ ./make.sh rk3399
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11/u-boot$ cd ..
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ cd kernel/
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11/kernel$ make ARCH=arm64 rockchip_defconfig android-11.config -j36
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11/kernel$ make ARCH=arm64 BOOT_IMG=../rockdev/Image-rk3399_Android11/boot.img rk3399-sapphire-excavator-edp-avb.img -j36
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ source build/envsetup.sh
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ lunch
36. rk3399_Android11-userdebug
Which would you like? [aosp_arm-eng] 36
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ make -j36
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ ./build.sh -u
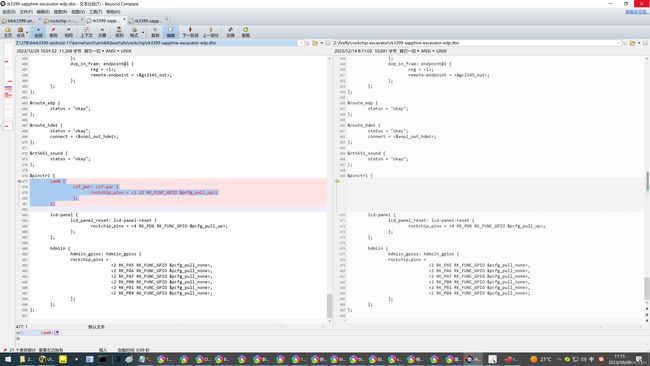
2、挖掘机的DTS修改:
Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip\rk3399-sapphire-excavator-edp.dtsi
/*
* Copyright (c) 2018 Fuzhou Rockchip Electronics Co., Ltd
*
* This file is dual-licensed: you can use it either under the terms
* of the GPL or the X11 license, at your option. Note that this dual
* licensing only applies to this file, and not this project as a
* whole.
*
* a) This file is free software; you can redistribute it and/or
* modify it under the terms of the GNU General Public License as
* published by the Free Software Foundation; either version 2 of the
* License, or (at your option) any later version.
*
* This file is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* Or, alternatively,
*
* b) Permission is hereby granted, free of charge, to any person
* obtaining a copy of this software and associated documentation
* files (the "Software"), to deal in the Software without
* restriction, including without limitation the rights to use,
* copy, modify, merge, publish, distribute, sublicense, and/or
* sell copies of the Software, and to permit persons to whom the
* Software is furnished to do so, subject to the following
* conditions:
*
* The above copyright notice and this permission notice shall be
* included in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES
* OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
* NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
* HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY,
* WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
* FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR
* OTHER DEALINGS IN THE SOFTWARE.
*/
/dts-v1/;
#include "rk3399-excavator-sapphire.dtsi"
#include "rk3399-android.dtsi"
#include "rk3399-vop-clk-set.dtsi"
/ {
vcc_lcd: vcc-lcd {
compatible = "regulator-fixed";
regulator-name = "vcc_lcd";
gpio = <&gpio4 30 GPIO_ACTIVE_HIGH>;
startup-delay-us = <20000>;
enable-active-high;
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-boot-on;
vin-supply = <&vcc5v0_sys>;
};
panel: panel {
compatible = "simple-panel";
backlight = <&backlight>;
power-supply = <&vcc_lcd>;
enable-gpios = <&gpio1 13 GPIO_ACTIVE_HIGH>;
prepare-delay-ms = <20>;
enable-delay-ms = <20>;
display-timings {
native-mode = <&timing0>;
timing0: timing0 {
clock-frequency = <200000000>;
hactive = <1536>;
vactive = <2048>;
hfront-porch = <12>;
hsync-len = <16>;
hback-porch = <48>;
vfront-porch = <8>;
vsync-len = <4>;
vback-porch = <8>;
hsync-active = <0>;
vsync-active = <0>;
de-active = <0>;
pixelclk-active = <0>;
};
};
ports {
panel_in: endpoint {
remote-endpoint = <&edp_out>;
};
};
};
test-power {
status = "okay";
};
hdmiin_sound: hdmiin-sound {
compatible = "rockchip,rockchip-rt5651-sound";
rockchip,cpu = <&i2s0>;
rockchip,codec = <&rt5651 &rt5651>;
status = "okay";
};
vcc_mipi: vcc_mipi {
compatible = "regulator-fixed";
enable-active-high;
gpio = <&gpio1 22 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&cif_pwr>;
regulator-name = "vcc_mipi";
};
};
&backlight {
status = "okay";
enable-gpios = <&gpio4 29 GPIO_ACTIVE_HIGH>;
};
&edp {
status = "okay";
force-hpd;
ports {
port@1 {
reg = <1>;
edp_out: endpoint {
remote-endpoint = <&panel_in>;
};
};
};
};
&edp_in_vopl {
status = "disabled";
};
&hdmi_in_vopb {
status = "disabled";
};
&rt5651 {
status = "okay";
};
&cdn_dp {
status = "disabled";
extcon = <&fusb0>;
phys = <&tcphy0_dp>;
};
&hdmi_dp_sound {
status = "okay";
};
&hdmiin_sound {
status = "disabled";
};
&dp_in_vopb {
status = "disabled";
};
&i2s2 {
status = "okay";
};
&i2c1 {
status = "okay";
gsl3673: gsl3673@40 {
compatible = "GSL,GSL3673";
reg = <0x40>;
screen_max_x = <1536>;
screen_max_y = <2048>;
irq_gpio_number = <&gpio1 20 IRQ_TYPE_LEVEL_LOW>;
rst_gpio_number = <&gpio4 22 GPIO_ACTIVE_HIGH>;
};
sgm3784: sgm3784@30 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "sgmicro,gsm3784";
reg = <0x30>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
enable-gpio = <&gpio2 RK_PB4 GPIO_ACTIVE_HIGH>;
strobe-gpio = <&gpio1 RK_PA3 GPIO_ACTIVE_HIGH>;
status = "okay";
sgm3784_led0: led@0 {
reg = <0x0>;
led-max-microamp = <299200>;
flash-max-microamp = <1122000>;
flash-max-timeout-us = <1600000>;
};
sgm3784_led1: led@1 {
reg = <0x1>;
led-max-microamp = <299200>;
flash-max-microamp = <1122000>;
flash-max-timeout-us = <1600000>;
};
};
tc358749x: tc358749x@0f {
compatible = "toshiba,tc358749x";
reg = <0x0f>;
power-gpios = <&gpio2 6 GPIO_ACTIVE_HIGH>;
power18-gpios = <&gpio2 9 GPIO_ACTIVE_HIGH>;
power33-gpios = <&gpio2 5 GPIO_ACTIVE_HIGH>;
csi-ctl-gpios = <&gpio2 10 GPIO_ACTIVE_HIGH>;
stanby-gpios = <&gpio2 8 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio2 7 GPIO_ACTIVE_HIGH>;
int-gpios = <&gpio2 12 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&hdmiin_gpios>;
status = "disabled";
};
gc2145: gc2145@3c{
status = "okay";
compatible = "galaxycore,gc2145";
reg = <0x3c>;
pinctrl-names = "default";
pinctrl-0 = <&cif_clkout>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
/* avdd-supply = <>; */
/* dvdd-supply = <>; */
/* dovdd-supply = <>; */
pwdn-gpios = <&gpio2 28 GPIO_ACTIVE_HIGH>; //ok
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "CameraKing";
rockchip,camera-module-lens-name = "Largan";
port {
gc2145_out: endpoint {
remote-endpoint = <&dvp_in_fcam>;
};
};
};
vm149c: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
ov13850b: ov13850b@10 {
compatible = "ovti,ov13850";
status = "disabled";
reg = <0x10>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
//avdd-supply = <&vcc_mipi>; /* VCC28_MIPI */
//dovdd-supply = <&vcc_mipi>; /* VCC18_MIPI */
//dvdd-supply = <&dvdd_1v2>; /* DVDD_1V2 */
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio2 2 GPIO_ACTIVE_HIGH>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
firefly,clkout-enabled-index = <0>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-CT0116";
rockchip,camera-module-lens-name = "Largan-50013A1";
lens-focus = <&vm149c>;
port {
ucam_out0: endpoint {
remote-endpoint = <&mipi_in_ucam0>;
data-lanes = <1 2>;
};
};
};
vm149c_front: vm149c_front@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
};
ov13850f: ov13850f@10 {
compatible = "ovti,ov13850";
status = "disabled";
reg = <0x10>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
//avdd-supply = <&vcc_mipi>; /* VCC28_MIPI */
//dovdd-supply = <&vcc_mipi>; /* VCC18_MIPI */
//dvdd-supply = <&dvdd_1v2>; /* DVDD_1V2 */
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio2 3 GPIO_ACTIVE_HIGH>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
firefly,second-enabled-index = <1>;
firefly,clkout-enabled-index = <0>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "CMK-CT0116";
rockchip,camera-module-lens-name = "Largan-50013A1";
lens-focus = <&vm149c_front>;
port {
ucam_out1: endpoint {
remote-endpoint = <&mipi_in_ucam1>;
data-lanes = <1 2>;
};
};
};
};
&i2c6 {
cw2015@62 {
status = "disabled";
compatible = "cw201x";
reg = <0x62>;
bat_config_info = <0x15 0x42 0x60 0x59 0x52 0x58 0x4D 0x48
0x48 0x44 0x44 0x46 0x49 0x48 0x32 0x24
0x20 0x17 0x13 0x0F 0x19 0x3E 0x51 0x45
0x08 0x76 0x0B 0x85 0x0E 0x1C 0x2E 0x3E
0x4D 0x52 0x52 0x57 0x3D 0x1B 0x6A 0x2D
0x25 0x43 0x52 0x87 0x8F 0x91 0x94 0x52
0x82 0x8C 0x92 0x96 0xFF 0x7B 0xBB 0xCB
0x2F 0x7D 0x72 0xA5 0xB5 0xC1 0x46 0xAE>;
monitor_sec = <5>;
virtual_power = <0>;
};
};
&isp0_mmu {
status = "okay";
};
&isp1_mmu {
status = "okay";
};
&mipi_dphy_rx0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out0>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_rx0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp0_mipi_in>;
};
};
};
};
&mipi_dphy_tx1rx1 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam1: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out1>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_tx1rx1_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp1_mipi_in>;
};
};
};
};
&vopb {
status = "okay";
assigned-clocks = <&cru DCLK_VOP0_DIV>;
assigned-clock-parents = <&cru PLL_CPLL>;
};
&vopl {
status = "okay";
assigned-clocks = <&cru DCLK_VOP1_DIV>;
assigned-clock-parents = <&cru PLL_VPLL>;
};
&pcie_phy {
status = "okay";
};
&pcie0 {
status = "okay";
};
&rkisp1_0 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_mipi_in: endpoint@0 {
reg = <0>;
remote-endpoint = <&dphy_rx0_out>;
};
};
};
&rkisp1_1 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp1_mipi_in: endpoint@0 {
reg = <0>;
remote-endpoint = <&dphy_tx1rx1_out>;
};
dvp_in_fcam: endpoint@1 {
reg = <1>;
remote-endpoint = <&gc2145_out>;
};
};
};
&route_edp {
status = "okay";
};
&route_hdmi {
status = "okay";
connect = <&vopl_out_hdmi>;
};
&rt5651_sound {
status = "okay";
};
&pinctrl {
cam0 {
cif_pwr: cif-pwr {
rockchip,pins = <1 22 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
lcd-panel {
lcd_panel_reset: lcd-panel-reset {
rockchip,pins = <4 RK_PD6 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
hdmiin {
hdmiin_gpios: hdmiin_gpios {
rockchip,pins =
<2 RK_PA5 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PA6 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PA7 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PB0 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PB1 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PB4 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};

3、
Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip\rk3399-sapphire-excavator-edp-avb.dts
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2018 Fuzhou Rockchip Electronics Co., Ltd
*/
/dts-v1/;
#include "rk3399-sapphire-excavator-edp.dtsi"
/ {
model = "Rockchip RK3399 Excavator Board edp avb (Android)";
compatible = "rockchip,android", "rockchip,rk3399-excavator-edp-avb", "rockchip,rk3399";
chosen: chosen {
bootargs = "earlycon=uart8250,mmio32,0xff1a0000 console=ttyFIQ0 androidboot.baseband=N/A androidboot.veritymode=enforcing androidboot.hardware=rk30board androidboot.console=ttyFIQ0 init=/init initrd=0x62000001,0x00800000 coherent_pool=1m";
};
ext_cam_clk: external-camera-clock {
compatible = "fixed-clock";
clock-frequency = <27000000>;
clock-output-names = "CLK_CAMERA_27MHZ";
#clock-cells = <0>;
};
};
&i2c1 {
status = "okay";
/delete-node/ tc358749x@0f;
tc35874x: tc35874x@0f {
status = "disabled";
reg = <0x0f>;
compatible = "toshiba,tc358749";
clocks = <&ext_cam_clk>;
clock-names = "refclk";
reset-gpios = <&gpio2 7 GPIO_ACTIVE_LOW>;
/* interrupt-parent = <&gpio2>; */
/* interrupts = <12 IRQ_TYPE_LEVEL_HIGH>; */
pinctrl-names = "default";
pinctrl-0 = <&tc35874x_gpios>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "TC358749XBG";
rockchip,camera-module-lens-name = "NC";
port {
hdmiin_out0: endpoint {
remote-endpoint = <&hdmi_to_mipi_in>;
data-lanes = <1 2 3 4>;
clock-noncontinuous;
link-frequencies =
/bits/ 64 <297000000>;
};
};
};
ov13850b: ov13850b@10 {
status = "okay";
avdd-supply = <&vcc_mipi>;
power-gpios = <&gpio1 23 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio2 1 GPIO_ACTIVE_HIGH>;
};
ov13850f: ov13850f@10 {
status = "okay";
avdd-supply = <&vcc_mipi>;
power-gpios = <&gpio1 23 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio2 28 GPIO_ACTIVE_HIGH>;
};
};
&mipi_dphy_rx0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out0>;
data-lanes = <1 2>;
};
hdmi_to_mipi_in: endpoint@2 {
reg = <2>;
remote-endpoint = <&hdmiin_out0>;
data-lanes = <1 2 3 4>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_rx0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp0_mipi_in>;
};
};
};
};
&mipi_dphy_tx1rx1 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam1: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out1>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_tx1rx1_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp1_mipi_in>;
};
};
};
};
&pinctrl {
hdmiin {
tc35874x_gpios: tc35874x_gpios {
rockchip,pins =
/* PWREN_3.3 */
<2 RK_PA5 RK_FUNC_GPIO &pcfg_output_high>,
/* PWREN_1.2 */
<2 RK_PA6 RK_FUNC_GPIO &pcfg_output_high>,
/* HDMIIN_RST */
<2 RK_PA7 RK_FUNC_GPIO &pcfg_pull_none>,
/* HDMIIN_STBY */
<2 RK_PB0 RK_FUNC_GPIO &pcfg_output_high>,
/* MIPI_RST */
<2 RK_PB1 RK_FUNC_GPIO &pcfg_output_high>,
/* CSI_CTL */
<2 RK_PB2 RK_FUNC_GPIO &pcfg_output_low>,
/* HDMIIN_INT */
<2 RK_PB4 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
&rkisp1_0 {
status = "okay";
};
&rkisp1_1 {
status = "okay";
};
这里【必须】配置mipi_dphy_tx1rx1,如果不配置,出不来/dev/video9,也就是你没有前置摄像头了!

4、摄像头ov13850前后兼容的魔改!
Z:\3TB\64rk3399-android-11\kernel\drivers\media\i2c\ov13850.c
// SPDX-License-Identifier: GPL-2.0
/*
* ov13850 driver
*
* Copyright (C) 2017 Fuzhou Rockchip Electronics Co., Ltd.
*
* V0.0X01.0X01 add poweron function.
* V0.0X01.0X02 fix mclk issue when probe multiple camera.
* V0.0X01.0X03 add enum_frame_interval function.
* V0.0X01.0X04 add quick stream on/off
* V0.0X01.0X05 add function g_mbus_config
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define DRIVER_VERSION KERNEL_VERSION(0, 0x01, 0x05)
#ifndef V4L2_CID_DIGITAL_GAIN
#define V4L2_CID_DIGITAL_GAIN V4L2_CID_GAIN
#endif
#define OV13850_LINK_FREQ_300MHZ 300000000
/* pixel rate = link frequency * 2 * lanes / BITS_PER_SAMPLE */
#define OV13850_PIXEL_RATE (OV13850_LINK_FREQ_300MHZ * 2 * 2 / 10)
#define OV13850_XVCLK_FREQ 24000000
#define CHIP_ID 0x00d850
#define OV13850_REG_CHIP_ID 0x300a
#define OV13850_REG_CTRL_MODE 0x0100
#define OV13850_MODE_SW_STANDBY 0x0
#define OV13850_MODE_STREAMING BIT(0)
#define OV13850_REG_EXPOSURE 0x3500
#define OV13850_EXPOSURE_MIN 4
#define OV13850_EXPOSURE_STEP 1
#define OV13850_VTS_MAX 0x7fff
#define OV13850_REG_GAIN_H 0x350a
#define OV13850_REG_GAIN_L 0x350b
#define OV13850_GAIN_H_MASK 0x07
#define OV13850_GAIN_H_SHIFT 8
#define OV13850_GAIN_L_MASK 0xff
#define OV13850_GAIN_MIN 0x10
#define OV13850_GAIN_MAX 0xf8
#define OV13850_GAIN_STEP 1
#define OV13850_GAIN_DEFAULT 0x10
#define OV13850_REG_TEST_PATTERN 0x5e00
#define OV13850_TEST_PATTERN_ENABLE 0x80
#define OV13850_TEST_PATTERN_DISABLE 0x0
#define OV13850_REG_VTS 0x380e
#define REG_NULL 0xFFFF
#define OV13850_REG_VALUE_08BIT 1
#define OV13850_REG_VALUE_16BIT 2
#define OV13850_REG_VALUE_24BIT 3
#define OV13850_LANES 2
#define OV13850_BITS_PER_SAMPLE 10
#define OV13850_CHIP_REVISION_REG 0x302A
#define OV13850_R1A 0xb1
#define OV13850_R2A 0xb2
#define OF_CAMERA_PINCTRL_STATE_DEFAULT "rockchip,camera_default"
#define OF_CAMERA_PINCTRL_STATE_SLEEP "rockchip,camera_sleep"
#define OV13850_I2C_ADDR0 0x10
#define OV13850_I2C_ADDR1 0x36
#define OV13850_NAME "ov13850"
static const struct regval *ov13850_global_regs;
static u32 clkout_enabled_index;
static const char * const ov13850_supply_names[] = {
"avdd", /* Analog power */
"dovdd", /* Digital I/O power */
"dvdd", /* Digital core power */
};
#define OV13850_NUM_SUPPLIES ARRAY_SIZE(ov13850_supply_names)
struct regval {
u16 addr;
u8 val;
};
struct ov13850_mode {
u32 width;
u32 height;
struct v4l2_fract max_fps;
u32 hts_def;
u32 vts_def;
u32 exp_def;
const struct regval *reg_list;
};
struct ov13850 {
struct i2c_client *client;
struct clk *xvclk;
struct gpio_desc *power_gpio;
struct gpio_desc *reset_gpio;
struct gpio_desc *pwdn_gpio;
struct regulator_bulk_data supplies[OV13850_NUM_SUPPLIES];
struct pinctrl *pinctrl;
struct pinctrl_state *pins_default;
struct pinctrl_state *pins_sleep;
struct v4l2_subdev subdev;
struct media_pad pad;
struct v4l2_ctrl_handler ctrl_handler;
struct v4l2_ctrl *exposure;
struct v4l2_ctrl *anal_gain;
struct v4l2_ctrl *digi_gain;
struct v4l2_ctrl *hblank;
struct v4l2_ctrl *vblank;
struct v4l2_ctrl *test_pattern;
struct mutex mutex;
bool streaming;
bool power_on;
const struct ov13850_mode *cur_mode;
u32 module_index;
const char *module_facing;
const char *module_name;
const char *len_name;
};
#define to_ov13850(sd) container_of(sd, struct ov13850, subdev)
/*
* Xclk 24Mhz
*/
static const struct regval ov13850_global_regs_r1a[] = {
{0x0103, 0x01},
{0x0300, 0x00},
{0x0301, 0x00},
{0x0302, 0x32},
{0x0303, 0x01},
{0x030a, 0x00},
{0x300f, 0x11},
{0x3010, 0x01},
{0x3011, 0x76},
{0x3012, 0x21},
{0x3013, 0x12},
{0x3014, 0x11},
{0x3015, 0xc0},
{0x301f, 0x03},
{0x3106, 0x00},
{0x3210, 0x47},
{0x3500, 0x00},
{0x3501, 0x60},
{0x3502, 0x00},
{0x3506, 0x00},
{0x3507, 0x02},
{0x3508, 0x00},
{0x350a, 0x00},
{0x350b, 0x80},
{0x350e, 0x00},
{0x350f, 0x10},
{0x3600, 0x40},
{0x3601, 0xfc},
{0x3602, 0x02},
{0x3603, 0x48},
{0x3604, 0xa5},
{0x3605, 0x9f},
{0x3607, 0x00},
{0x360a, 0x40},
{0x360b, 0x91},
{0x360c, 0x49},
{0x360f, 0x8a},
{0x3611, 0x10},
{0x3612, 0x27},
{0x3613, 0x33},
{0x3615, 0x08},
{0x3641, 0x02},
{0x3660, 0x82},
{0x3668, 0x54},
{0x3669, 0x40},
{0x3667, 0xa0},
{0x3702, 0x40},
{0x3703, 0x44},
{0x3704, 0x2c},
{0x3705, 0x24},
{0x3706, 0x50},
{0x3707, 0x44},
{0x3708, 0x3c},
{0x3709, 0x1f},
{0x370a, 0x26},
{0x370b, 0x3c},
{0x3720, 0x66},
{0x3722, 0x84},
{0x3728, 0x40},
{0x372a, 0x00},
{0x372f, 0x90},
{0x3710, 0x28},
{0x3716, 0x03},
{0x3718, 0x10},
{0x3719, 0x08},
{0x371c, 0xfc},
{0x3760, 0x13},
{0x3761, 0x34},
{0x3767, 0x24},
{0x3768, 0x06},
{0x3769, 0x45},
{0x376c, 0x23},
{0x3d84, 0x00},
{0x3d85, 0x17},
{0x3d8c, 0x73},
{0x3d8d, 0xbf},
{0x3800, 0x00},
{0x3801, 0x08},
{0x3802, 0x00},
{0x3803, 0x04},
{0x3804, 0x10},
{0x3805, 0x97},
{0x3806, 0x0c},
{0x3807, 0x4b},
{0x3808, 0x08},
{0x3809, 0x40},
{0x380a, 0x06},
{0x380b, 0x20},
{0x380c, 0x12},
{0x380d, 0xc0},
{0x380e, 0x06},
{0x380f, 0x80},
{0x3810, 0x00},
{0x3811, 0x04},
{0x3812, 0x00},
{0x3813, 0x02},
{0x3814, 0x31},
{0x3815, 0x31},
{0x3820, 0x02},
{0x3821, 0x05},
{0x3834, 0x00},
{0x3835, 0x1c},
{0x3836, 0x08},
{0x3837, 0x02},
{0x4000, 0xf1},
{0x4001, 0x00},
{0x400b, 0x0c},
{0x4011, 0x00},
{0x401a, 0x00},
{0x401b, 0x00},
{0x401c, 0x00},
{0x401d, 0x00},
{0x4020, 0x00},
{0x4021, 0xE4},
{0x4022, 0x07},
{0x4023, 0x5F},
{0x4024, 0x08},
{0x4025, 0x44},
{0x4026, 0x08},
{0x4027, 0x47},
{0x4028, 0x00},
{0x4029, 0x02},
{0x402a, 0x04},
{0x402b, 0x08},
{0x402c, 0x02},
{0x402d, 0x02},
{0x402e, 0x0c},
{0x402f, 0x08},
{0x403d, 0x2c},
{0x403f, 0x7f},
{0x4500, 0x82},
{0x4501, 0x38},
{0x4601, 0x04},
{0x4602, 0x22},
{0x4603, 0x01},
{0x4800, 0x24}, //MIPI CLK control
{0x4837, 0x1b},
{0x4d00, 0x04},
{0x4d01, 0x42},
{0x4d02, 0xd1},
{0x4d03, 0x90},
{0x4d04, 0x66},
{0x4d05, 0x65},
{0x5000, 0x0e},
{0x5001, 0x01},
{0x5002, 0x07},
{0x5013, 0x40},
{0x501c, 0x00},
{0x501d, 0x10},
{0x5242, 0x00},
{0x5243, 0xb8},
{0x5244, 0x00},
{0x5245, 0xf9},
{0x5246, 0x00},
{0x5247, 0xf6},
{0x5248, 0x00},
{0x5249, 0xa6},
{0x5300, 0xfc},
{0x5301, 0xdf},
{0x5302, 0x3f},
{0x5303, 0x08},
{0x5304, 0x0c},
{0x5305, 0x10},
{0x5306, 0x20},
{0x5307, 0x40},
{0x5308, 0x08},
{0x5309, 0x08},
{0x530a, 0x02},
{0x530b, 0x01},
{0x530c, 0x01},
{0x530d, 0x0c},
{0x530e, 0x02},
{0x530f, 0x01},
{0x5310, 0x01},
{0x5400, 0x00},
{0x5401, 0x61},
{0x5402, 0x00},
{0x5403, 0x00},
{0x5404, 0x00},
{0x5405, 0x40},
{0x540c, 0x05},
{0x5b00, 0x00},
{0x5b01, 0x00},
{0x5b02, 0x01},
{0x5b03, 0xff},
{0x5b04, 0x02},
{0x5b05, 0x6c},
{0x5b09, 0x02},
{0x5e00, 0x00},
{0x5e10, 0x1c},
{0x0102, 0x01}, //Fast standby enable
{REG_NULL, 0x00},
};
/*
* Xclk 24Mhz
*/
static const struct regval ov13850_global_regs_r2a[] = {
{0x0300, 0x01},
{0x0301, 0x00},
{0x0302, 0x28},
{0x0303, 0x00},
{0x030a, 0x00},
{0x300f, 0x11},
{0x3010, 0x01},
{0x3011, 0x76},
{0x3012, 0x21},
{0x3013, 0x12},
{0x3014, 0x11},
{0x301f, 0x03},
{0x3106, 0x00},
{0x3210, 0x47},
{0x3500, 0x00},
{0x3501, 0x60},
{0x3502, 0x00},
{0x3506, 0x00},
{0x3507, 0x02},
{0x3508, 0x00},
{0x350a, 0x00},
{0x350b, 0x80},
{0x350e, 0x00},
{0x350f, 0x10},
{0x351a, 0x00},
{0x351b, 0x10},
{0x351c, 0x00},
{0x351d, 0x20},
{0x351e, 0x00},
{0x351f, 0x40},
{0x3520, 0x00},
{0x3521, 0x80},
{0x3600, 0xc0},
{0x3601, 0xfc},
{0x3602, 0x02},
{0x3603, 0x78},
{0x3604, 0xb1},
{0x3605, 0xb5},
{0x3606, 0x73},
{0x3607, 0x07},
{0x3609, 0x40},
{0x360a, 0x30},
{0x360b, 0x91},
{0x360c, 0x09},
{0x360f, 0x02},
{0x3611, 0x10},
{0x3612, 0x27},
{0x3613, 0x33},
{0x3615, 0x0c},
{0x3616, 0x0e},
{0x3641, 0x02},
{0x3660, 0x82},
{0x3668, 0x54},
{0x3669, 0x00},
{0x366a, 0x3f},
{0x3667, 0xa0},
{0x3702, 0x40},
{0x3703, 0x44},
{0x3704, 0x2c},
{0x3705, 0x01},
{0x3706, 0x15},
{0x3707, 0x44},
{0x3708, 0x3c},
{0x3709, 0x1f},
{0x370a, 0x27},
{0x370b, 0x3c},
{0x3720, 0x55},
{0x3722, 0x84},
{0x3728, 0x40},
{0x372a, 0x00},
{0x372b, 0x02},
{0x372e, 0x22},
{0x372f, 0x90},
{0x3730, 0x00},
{0x3731, 0x00},
{0x3732, 0x00},
{0x3733, 0x00},
{0x3710, 0x28},
{0x3716, 0x03},
{0x3718, 0x10},
{0x3719, 0x0c},
{0x371a, 0x08},
{0x371c, 0xfc},
{0x3748, 0x00},
{0x3760, 0x13},
{0x3761, 0x33},
{0x3762, 0x86},
{0x3763, 0x16},
{0x3767, 0x24},
{0x3768, 0x06},
{0x3769, 0x45},
{0x376c, 0x23},
{0x376f, 0x80},
{0x3773, 0x06},
{0x3d84, 0x00},
{0x3d85, 0x17},
{0x3d8c, 0x73},
{0x3d8d, 0xbf},
{0x3800, 0x00},
{0x3801, 0x08},
{0x3802, 0x00},
{0x3803, 0x04},
{0x3804, 0x10},
{0x3805, 0x97},
{0x3806, 0x0c},
{0x3807, 0x4b},
{0x3808, 0x08},
{0x3809, 0x40},
{0x380a, 0x06},
{0x380b, 0x20},
{0x380c, 0x12},
{0x380d, 0xc0},
{0x380e, 0x06},
{0x380f, 0x80},
{0x3810, 0x00},
{0x3811, 0x04},
{0x3812, 0x00},
{0x3813, 0x02},
{0x3814, 0x31},
{0x3815, 0x31},
{0x3820, 0x02},
{0x3821, 0x06},
{0x3823, 0x00},
{0x3826, 0x00},
{0x3827, 0x02},
{0x3834, 0x00},
{0x3835, 0x1c},
{0x3836, 0x08},
{0x3837, 0x02},
{0x4000, 0xf1},
{0x4001, 0x00},
{0x4006, 0x04},
{0x4007, 0x04},
{0x400b, 0x0c},
{0x4011, 0x00},
{0x401a, 0x00},
{0x401b, 0x00},
{0x401c, 0x00},
{0x401d, 0x00},
{0x4020, 0x00},
{0x4021, 0xe4},
{0x4022, 0x04},
{0x4023, 0xd7},
{0x4024, 0x05},
{0x4025, 0xbc},
{0x4026, 0x05},
{0x4027, 0xbf},
{0x4028, 0x00},
{0x4029, 0x02},
{0x402a, 0x04},
{0x402b, 0x08},
{0x402c, 0x02},
{0x402d, 0x02},
{0x402e, 0x0c},
{0x402f, 0x08},
{0x403d, 0x2c},
{0x403f, 0x7f},
{0x4041, 0x07},
{0x4500, 0x82},
{0x4501, 0x3c},
{0x458b, 0x00},
{0x459c, 0x00},
{0x459d, 0x00},
{0x459e, 0x00},
{0x4601, 0x83},
{0x4602, 0x22},
{0x4603, 0x01},
{0x4800, 0x24}, //MIPI CLK control
{0x4837, 0x19},
{0x4d00, 0x04},
{0x4d01, 0x42},
{0x4d02, 0xd1},
{0x4d03, 0x90},
{0x4d04, 0x66},
{0x4d05, 0x65},
{0x4d0b, 0x00},
{0x5000, 0x0e},
{0x5001, 0x01},
{0x5002, 0x07},
{0x5013, 0x40},
{0x501c, 0x00},
{0x501d, 0x10},
{0x510f, 0xfc},
{0x5110, 0xf0},
{0x5111, 0x10},
{0x536d, 0x02},
{0x536e, 0x67},
{0x536f, 0x01},
{0x5370, 0x4c},
{0x5400, 0x00},
{0x5400, 0x00},
{0x5401, 0x61},
{0x5402, 0x00},
{0x5403, 0x00},
{0x5404, 0x00},
{0x5405, 0x40},
{0x540c, 0x05},
{0x5501, 0x00},
{0x5b00, 0x00},
{0x5b01, 0x00},
{0x5b02, 0x01},
{0x5b03, 0xff},
{0x5b04, 0x02},
{0x5b05, 0x6c},
{0x5b09, 0x02},
{0x5e00, 0x00},
{0x5e10, 0x1c},
{0x0102, 0x01}, //Fast standby enable
{REG_NULL, 0x00},
};
/*
* Xclk 24Mhz
* max_framerate 30fps
* mipi_datarate per lane 600Mbps
*/
static const struct regval ov13850_2112x1568_regs[] = {
{0x3612, 0x27},
{0x370a, 0x26},
{0x372a, 0x00},
{0x372f, 0x90},
{0x3801, 0x08},
{0x3805, 0x97},
{0x3807, 0x4b},
{0x3808, 0x08},
{0x3809, 0x40},
{0x380a, 0x06},
{0x380b, 0x20},
{0x380c, 0x12},
{0x380d, 0xc0},
{0x380e, 0x06},
{0x380f, 0x80},
{0x3813, 0x02},
{0x3814, 0x31},
{0x3815, 0x31},
{0x3820, 0x02},
{0x3821, 0x05},
{0x3836, 0x08},
{0x3837, 0x02},
{0x4601, 0x04},
{0x4603, 0x00},
{0x4020, 0x00},
{0x4021, 0xE4},
{0x4022, 0x07},
{0x4023, 0x5F},
{0x4024, 0x08},
{0x4025, 0x44},
{0x4026, 0x08},
{0x4027, 0x47},
{0x4603, 0x01},
{0x5401, 0x61},
{0x5405, 0x40},
{REG_NULL, 0x00},
};
/*
* Xclk 24Mhz
* max_framerate 7fps
* mipi_datarate per lane 600Mbps
*/
static const struct regval ov13850_4224x3136_regs[] = {
{0x3612, 0x2f},
{0x370a, 0x24},
{0x372a, 0x04},
{0x372f, 0xa0},
{0x3801, 0x0C},
{0x3805, 0x93},
{0x3807, 0x4B},
{0x3808, 0x10},
{0x3809, 0x80},
{0x380a, 0x0c},
{0x380b, 0x40},
{0x380e, 0x0d},
{0x380f, 0x00},
{0x3813, 0x04},
{0x3814, 0x11},
{0x3815, 0x11},
{0x3820, 0x00},
{0x3821, 0x04},
{0x3836, 0x04},
{0x3837, 0x01},
{0x4601, 0x87},
{0x4603, 0x01},
{0x4020, 0x02},
{0x4021, 0x4C},
{0x4022, 0x0E},
{0x4023, 0x37},
{0x4024, 0x0F},
{0x4025, 0x1C},
{0x4026, 0x0F},
{0x4027, 0x1F},
{0x4603, 0x00},
{0x5401, 0x71},
{0x5405, 0x80},
{REG_NULL, 0x00},
};
static const struct ov13850_mode supported_modes[] = {
{
.width = 2112,
.height = 1568,
.max_fps = {
.numerator = 10000,
.denominator = 300000,
},
.exp_def = 0x0600,
.hts_def = 0x12c0,
.vts_def = 0x0680,
.reg_list = ov13850_2112x1568_regs,
},{
.width = 4224,
.height = 3136,
.max_fps = {
.numerator = 20000,
.denominator = 150000,
},
.exp_def = 0x0600,
.hts_def = 0x12c0,
.vts_def = 0x0d00,
.reg_list = ov13850_4224x3136_regs,
},
};
static const s64 link_freq_menu_items[] = {
OV13850_LINK_FREQ_300MHZ
};
static const char * const ov13850_test_pattern_menu[] = {
"Disabled",
"Vertical Color Bar Type 1",
"Vertical Color Bar Type 2",
"Vertical Color Bar Type 3",
"Vertical Color Bar Type 4"
};
/* Write registers up to 4 at a time */
static int ov13850_write_reg(struct i2c_client *client, u16 reg,
u32 len, u32 val)
{
u32 buf_i, val_i;
u8 buf[6];
u8 *val_p;
__be32 val_be;
dev_dbg(&client->dev, "write reg(0x%x val:0x%x)!\n", reg, val);
if (len > 4)
return -EINVAL;
buf[0] = reg >> 8;
buf[1] = reg & 0xff;
val_be = cpu_to_be32(val);
val_p = (u8 *)&val_be;
buf_i = 2;
val_i = 4 - len;
while (val_i < 4)
buf[buf_i++] = val_p[val_i++];
if (i2c_master_send(client, buf, len + 2) != len + 2)
return -EIO;
return 0;
}
static int ov13850_write_array(struct i2c_client *client,
const struct regval *regs)
{
u32 i;
int ret = 0;
for (i = 0; ret == 0 && regs[i].addr != REG_NULL; i++)
ret = ov13850_write_reg(client, regs[i].addr,
OV13850_REG_VALUE_08BIT,
regs[i].val);
return ret;
}
/* Read registers up to 4 at a time */
static int ov13850_read_reg(struct i2c_client *client, u16 reg,
unsigned int len, u32 *val)
{
struct i2c_msg msgs[2];
u8 *data_be_p;
__be32 data_be = 0;
__be16 reg_addr_be = cpu_to_be16(reg);
int ret;
if (len > 4 || !len)
return -EINVAL;
data_be_p = (u8 *)&data_be;
/* Write register address */
msgs[0].addr = client->addr;
msgs[0].flags = 0;
msgs[0].len = 2;
msgs[0].buf = (u8 *)®_addr_be;
/* Read data from register */
msgs[1].addr = client->addr;
msgs[1].flags = I2C_M_RD;
msgs[1].len = len;
msgs[1].buf = &data_be_p[4 - len];
ret = i2c_transfer(client->adapter, msgs, ARRAY_SIZE(msgs));
if (ret != ARRAY_SIZE(msgs))
return -EIO;
*val = be32_to_cpu(data_be);
return 0;
}
static int ov13850_get_reso_dist(const struct ov13850_mode *mode,
struct v4l2_mbus_framefmt *framefmt)
{
return abs(mode->width - framefmt->width) +
abs(mode->height - framefmt->height);
}
static const struct ov13850_mode *
ov13850_find_best_fit(struct v4l2_subdev_format *fmt)
{
struct v4l2_mbus_framefmt *framefmt = &fmt->format;
int dist;
int cur_best_fit = 0;
int cur_best_fit_dist = -1;
unsigned int i;
for (i = 0; i < ARRAY_SIZE(supported_modes); i++) {
dist = ov13850_get_reso_dist(&supported_modes[i], framefmt);
if (cur_best_fit_dist == -1 || dist < cur_best_fit_dist) {
cur_best_fit_dist = dist;
cur_best_fit = i;
}
}
return &supported_modes[cur_best_fit];
}
static int ov13850_set_fmt(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_format *fmt)
{
struct ov13850 *ov13850 = to_ov13850(sd);
const struct ov13850_mode *mode;
s64 h_blank, vblank_def;
mutex_lock(&ov13850->mutex);
mode = ov13850_find_best_fit(fmt);
fmt->format.code = MEDIA_BUS_FMT_SBGGR10_1X10;
fmt->format.width = mode->width;
fmt->format.height = mode->height;
fmt->format.field = V4L2_FIELD_NONE;
if (fmt->which == V4L2_SUBDEV_FORMAT_TRY) {
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
*v4l2_subdev_get_try_format(sd, cfg, fmt->pad) = fmt->format;
#else
mutex_unlock(&ov13850->mutex);
return -ENOTTY;
#endif
} else {
ov13850->cur_mode = mode;
h_blank = mode->hts_def - mode->width;
__v4l2_ctrl_modify_range(ov13850->hblank, h_blank,
h_blank, 1, h_blank);
vblank_def = mode->vts_def - mode->height;
__v4l2_ctrl_modify_range(ov13850->vblank, vblank_def,
OV13850_VTS_MAX - mode->height,
1, vblank_def);
}
mutex_unlock(&ov13850->mutex);
return 0;
}
static int ov13850_get_fmt(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_format *fmt)
{
struct ov13850 *ov13850 = to_ov13850(sd);
const struct ov13850_mode *mode = ov13850->cur_mode;
mutex_lock(&ov13850->mutex);
if (fmt->which == V4L2_SUBDEV_FORMAT_TRY) {
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
fmt->format = *v4l2_subdev_get_try_format(sd, cfg, fmt->pad);
#else
mutex_unlock(&ov13850->mutex);
return -ENOTTY;
#endif
} else {
fmt->format.width = mode->width;
fmt->format.height = mode->height;
fmt->format.code = MEDIA_BUS_FMT_SBGGR10_1X10;
fmt->format.field = V4L2_FIELD_NONE;
}
mutex_unlock(&ov13850->mutex);
return 0;
}
static int ov13850_enum_mbus_code(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_mbus_code_enum *code)
{
if (code->index != 0)
return -EINVAL;
code->code = MEDIA_BUS_FMT_SBGGR10_1X10;
return 0;
}
static int ov13850_enum_frame_sizes(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_frame_size_enum *fse)
{
if (fse->index >= ARRAY_SIZE(supported_modes))
return -EINVAL;
if (fse->code != MEDIA_BUS_FMT_SBGGR10_1X10)
return -EINVAL;
fse->min_width = supported_modes[fse->index].width;
fse->max_width = supported_modes[fse->index].width;
fse->max_height = supported_modes[fse->index].height;
fse->min_height = supported_modes[fse->index].height;
return 0;
}
static int ov13850_enable_test_pattern(struct ov13850 *ov13850, u32 pattern)
{
u32 val;
if (pattern)
val = (pattern - 1) | OV13850_TEST_PATTERN_ENABLE;
else
val = OV13850_TEST_PATTERN_DISABLE;
return ov13850_write_reg(ov13850->client,
OV13850_REG_TEST_PATTERN,
OV13850_REG_VALUE_08BIT,
val);
}
static int ov13850_g_frame_interval(struct v4l2_subdev *sd,
struct v4l2_subdev_frame_interval *fi)
{
struct ov13850 *ov13850 = to_ov13850(sd);
const struct ov13850_mode *mode = ov13850->cur_mode;
mutex_lock(&ov13850->mutex);
fi->interval = mode->max_fps;
mutex_unlock(&ov13850->mutex);
return 0;
}
static void ov13850_get_module_inf(struct ov13850 *ov13850,
struct rkmodule_inf *inf)
{
memset(inf, 0, sizeof(*inf));
strlcpy(inf->base.sensor, OV13850_NAME, sizeof(inf->base.sensor));
strlcpy(inf->base.module, ov13850->module_name,
sizeof(inf->base.module));
strlcpy(inf->base.lens, ov13850->len_name, sizeof(inf->base.lens));
}
static long ov13850_ioctl(struct v4l2_subdev *sd, unsigned int cmd, void *arg)
{
struct ov13850 *ov13850 = to_ov13850(sd);
long ret = 0;
u32 stream = 0;
switch (cmd) {
case RKMODULE_GET_MODULE_INFO:
ov13850_get_module_inf(ov13850, (struct rkmodule_inf *)arg);
break;
case RKMODULE_SET_QUICK_STREAM:
stream = *((u32 *)arg);
if (stream)
ret = ov13850_write_reg(ov13850->client,
OV13850_REG_CTRL_MODE,
OV13850_REG_VALUE_08BIT,
OV13850_MODE_STREAMING);
else
ret = ov13850_write_reg(ov13850->client,
OV13850_REG_CTRL_MODE,
OV13850_REG_VALUE_08BIT,
OV13850_MODE_SW_STANDBY);
break;
default:
ret = -ENOIOCTLCMD;
break;
}
return ret;
}
#ifdef CONFIG_COMPAT
static long ov13850_compat_ioctl32(struct v4l2_subdev *sd,
unsigned int cmd, unsigned long arg)
{
void __user *up = compat_ptr(arg);
struct rkmodule_inf *inf;
struct rkmodule_awb_cfg *cfg;
long ret;
u32 stream = 0;
switch (cmd) {
case RKMODULE_GET_MODULE_INFO:
inf = kzalloc(sizeof(*inf), GFP_KERNEL);
if (!inf) {
ret = -ENOMEM;
return ret;
}
ret = ov13850_ioctl(sd, cmd, inf);
if (!ret)
ret = copy_to_user(up, inf, sizeof(*inf));
kfree(inf);
break;
case RKMODULE_AWB_CFG:
cfg = kzalloc(sizeof(*cfg), GFP_KERNEL);
if (!cfg) {
ret = -ENOMEM;
return ret;
}
ret = copy_from_user(cfg, up, sizeof(*cfg));
if (!ret)
ret = ov13850_ioctl(sd, cmd, cfg);
kfree(cfg);
break;
case RKMODULE_SET_QUICK_STREAM:
ret = copy_from_user(&stream, up, sizeof(u32));
if (!ret)
ret = ov13850_ioctl(sd, cmd, &stream);
break;
default:
ret = -ENOIOCTLCMD;
break;
}
return ret;
}
#endif
static int __ov13850_start_stream(struct ov13850 *ov13850)
{
int ret;
ret = ov13850_write_array(ov13850->client, ov13850->cur_mode->reg_list);
if (ret)
return ret;
/* In case these controls are set before streaming */
mutex_unlock(&ov13850->mutex);
ret = v4l2_ctrl_handler_setup(&ov13850->ctrl_handler);
mutex_lock(&ov13850->mutex);
if (ret)
return ret;
return ov13850_write_reg(ov13850->client,
OV13850_REG_CTRL_MODE,
OV13850_REG_VALUE_08BIT,
OV13850_MODE_STREAMING);
}
static int __ov13850_stop_stream(struct ov13850 *ov13850)
{
return ov13850_write_reg(ov13850->client,
OV13850_REG_CTRL_MODE,
OV13850_REG_VALUE_08BIT,
OV13850_MODE_SW_STANDBY);
}
static int ov13850_s_stream(struct v4l2_subdev *sd, int on)
{
struct ov13850 *ov13850 = to_ov13850(sd);
struct i2c_client *client = ov13850->client;
int ret = 0;
mutex_lock(&ov13850->mutex);
on = !!on;
if (on == ov13850->streaming)
goto unlock_and_return;
if (on) {
ret = pm_runtime_get_sync(&client->dev);
if (ret < 0) {
pm_runtime_put_noidle(&client->dev);
goto unlock_and_return;
}
ret = __ov13850_start_stream(ov13850);
if (ret) {
v4l2_err(sd, "start stream failed while write regs\n");
pm_runtime_put(&client->dev);
goto unlock_and_return;
}
} else {
__ov13850_stop_stream(ov13850);
pm_runtime_put(&client->dev);
}
ov13850->streaming = on;
unlock_and_return:
mutex_unlock(&ov13850->mutex);
return ret;
}
static int __ov13850_power_on(struct ov13850 *ov13850);
static void __ov13850_power_off(struct ov13850 *ov13850);
static int ov13850_s_power(struct v4l2_subdev *sd, int on)
{
struct ov13850 *ov13850 = to_ov13850(sd);
struct i2c_client *client = ov13850->client;
int ret = 0;
mutex_lock(&ov13850->mutex);
/* If the power state is not modified - no work to do. */
if (ov13850->power_on == !!on)
goto unlock_and_return;
if (on) {
ret = pm_runtime_get_sync(&client->dev);
if (ret < 0) {
pm_runtime_put_noidle(&client->dev);
goto unlock_and_return;
}
__ov13850_power_on(ov13850);
ret = ov13850_write_array(ov13850->client, ov13850_global_regs);
if (ret) {
v4l2_err(sd, "could not set init registers\n");
pm_runtime_put_noidle(&client->dev);
goto unlock_and_return;
}
ov13850->power_on = true;
/* export gpio */
if (!IS_ERR(ov13850->reset_gpio))
gpiod_export(ov13850->reset_gpio, false);
if (!IS_ERR(ov13850->pwdn_gpio))
gpiod_export(ov13850->pwdn_gpio, false);
} else {
pm_runtime_put(&client->dev);
__ov13850_power_off(ov13850);
ov13850->power_on = false;
/* unexport gpio */
if (!IS_ERR(ov13850->reset_gpio))
gpiod_unexport(ov13850->reset_gpio);
if (!IS_ERR(ov13850->pwdn_gpio))
gpiod_unexport(ov13850->pwdn_gpio);
}
unlock_and_return:
mutex_unlock(&ov13850->mutex);
return ret;
}
/* Calculate the delay in us by clock rate and clock cycles */
static inline u32 ov13850_cal_delay(u32 cycles)
{
return DIV_ROUND_UP(cycles, OV13850_XVCLK_FREQ / 1000 / 1000);
}
static int __ov13850_power_on(struct ov13850 *ov13850)
{
int ret;
u32 delay_us;
struct device *dev = &ov13850->client->dev;
if (!IS_ERR_OR_NULL(ov13850->pins_default)) {
ret = pinctrl_select_state(ov13850->pinctrl,
ov13850->pins_default);
if (ret < 0)
dev_err(dev, "could not set pins\n");
}
if (clkout_enabled_index){
ret = clk_set_rate(ov13850->xvclk, OV13850_XVCLK_FREQ);
if (ret < 0)
dev_warn(dev, "Failed to set xvclk rate (24MHz)\n");
if (clk_get_rate(ov13850->xvclk) != OV13850_XVCLK_FREQ)
dev_warn(dev, "xvclk mismatched, modes are based on 24MHz\n");
ret = clk_prepare_enable(ov13850->xvclk);
if (ret < 0) {
dev_err(dev, "Failed to enable xvclk\n");
return ret;
}
}
if (!IS_ERR(ov13850->reset_gpio))
gpiod_set_value_cansleep(ov13850->reset_gpio, 0);
ret = regulator_bulk_enable(OV13850_NUM_SUPPLIES, ov13850->supplies);
if (ret < 0) {
dev_err(dev, "Failed to enable regulators\n");
goto disable_clk;
}
if (!IS_ERR(ov13850->power_gpio))
gpiod_set_value_cansleep(ov13850->power_gpio, 1);
if (!IS_ERR(ov13850->reset_gpio))
gpiod_set_value_cansleep(ov13850->reset_gpio, 1);
usleep_range(500, 1000);
if (!IS_ERR(ov13850->pwdn_gpio))
gpiod_set_value_cansleep(ov13850->pwdn_gpio, 1);
/* 8192 cycles prior to first SCCB transaction */
delay_us = ov13850_cal_delay(8192);
usleep_range(delay_us, delay_us * 2);
return 0;
disable_clk:
if (clkout_enabled_index)
clk_disable_unprepare(ov13850->xvclk);
return ret;
}
static void __ov13850_power_off(struct ov13850 *ov13850)
{
int ret;
struct device *dev = &ov13850->client->dev;
if (!IS_ERR(ov13850->pwdn_gpio))
gpiod_set_value_cansleep(ov13850->pwdn_gpio, 0);
if (clkout_enabled_index)
clk_disable_unprepare(ov13850->xvclk);
//if (!IS_ERR(ov13850->power_gpio))
// gpiod_set_value_cansleep(ov13850->power_gpio, 0);
//if (!IS_ERR(ov13850->reset_gpio))
// gpiod_set_value_cansleep(ov13850->reset_gpio, 0);
if (!IS_ERR_OR_NULL(ov13850->pins_sleep)) {
ret = pinctrl_select_state(ov13850->pinctrl,
ov13850->pins_sleep);
if (ret < 0)
dev_dbg(dev, "could not set pins\n");
}
regulator_bulk_disable(OV13850_NUM_SUPPLIES, ov13850->supplies);
}
static int ov13850_runtime_resume(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct v4l2_subdev *sd = i2c_get_clientdata(client);
struct ov13850 *ov13850 = to_ov13850(sd);
return __ov13850_power_on(ov13850);
}
static int ov13850_runtime_suspend(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct v4l2_subdev *sd = i2c_get_clientdata(client);
struct ov13850 *ov13850 = to_ov13850(sd);
__ov13850_power_off(ov13850);
return 0;
}
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
static int ov13850_open(struct v4l2_subdev *sd, struct v4l2_subdev_fh *fh)
{
struct ov13850 *ov13850 = to_ov13850(sd);
struct v4l2_mbus_framefmt *try_fmt =
v4l2_subdev_get_try_format(sd, fh->pad, 0);
const struct ov13850_mode *def_mode = &supported_modes[0];
mutex_lock(&ov13850->mutex);
/* Initialize try_fmt */
try_fmt->width = def_mode->width;
try_fmt->height = def_mode->height;
try_fmt->code = MEDIA_BUS_FMT_SBGGR10_1X10;
try_fmt->field = V4L2_FIELD_NONE;
mutex_unlock(&ov13850->mutex);
/* No crop or compose */
return 0;
}
#endif
static int ov13850_enum_frame_interval(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_frame_interval_enum *fie)
{
if (fie->index >= ARRAY_SIZE(supported_modes))
return -EINVAL;
if (fie->code != MEDIA_BUS_FMT_SBGGR10_1X10)
return -EINVAL;
fie->width = supported_modes[fie->index].width;
fie->height = supported_modes[fie->index].height;
fie->interval = supported_modes[fie->index].max_fps;
return 0;
}
static int ov13850_g_mbus_config(struct v4l2_subdev *sd,
struct v4l2_mbus_config *config)
{
u32 val = 0;
val = 1 << (OV13850_LANES - 1) |
V4L2_MBUS_CSI2_CHANNEL_0 |
V4L2_MBUS_CSI2_CONTINUOUS_CLOCK;
config->type = V4L2_MBUS_CSI2;
config->flags = val;
return 0;
}
static const struct dev_pm_ops ov13850_pm_ops = {
SET_RUNTIME_PM_OPS(ov13850_runtime_suspend,
ov13850_runtime_resume, NULL)
};
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
static const struct v4l2_subdev_internal_ops ov13850_internal_ops = {
.open = ov13850_open,
};
#endif
static const struct v4l2_subdev_core_ops ov13850_core_ops = {
.s_power = ov13850_s_power,
.ioctl = ov13850_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl32 = ov13850_compat_ioctl32,
#endif
};
static const struct v4l2_subdev_video_ops ov13850_video_ops = {
.s_stream = ov13850_s_stream,
.g_frame_interval = ov13850_g_frame_interval,
.g_mbus_config = ov13850_g_mbus_config,
};
static const struct v4l2_subdev_pad_ops ov13850_pad_ops = {
.enum_mbus_code = ov13850_enum_mbus_code,
.enum_frame_size = ov13850_enum_frame_sizes,
.enum_frame_interval = ov13850_enum_frame_interval,
.get_fmt = ov13850_get_fmt,
.set_fmt = ov13850_set_fmt,
};
static const struct v4l2_subdev_ops ov13850_subdev_ops = {
.core = &ov13850_core_ops,
.video = &ov13850_video_ops,
.pad = &ov13850_pad_ops,
};
static int ov13850_set_ctrl(struct v4l2_ctrl *ctrl)
{
struct ov13850 *ov13850 = container_of(ctrl->handler,
struct ov13850, ctrl_handler);
struct i2c_client *client = ov13850->client;
s64 max;
int ret = 0;
/* Propagate change of current control to all related controls */
switch (ctrl->id) {
case V4L2_CID_VBLANK:
/* Update max exposure while meeting expected vblanking */
max = ov13850->cur_mode->height + ctrl->val - 4;
__v4l2_ctrl_modify_range(ov13850->exposure,
ov13850->exposure->minimum, max,
ov13850->exposure->step,
ov13850->exposure->default_value);
break;
}
if (!pm_runtime_get_if_in_use(&client->dev))
return 0;
switch (ctrl->id) {
case V4L2_CID_EXPOSURE:
/* 4 least significant bits of expsoure are fractional part */
ret = ov13850_write_reg(ov13850->client,
OV13850_REG_EXPOSURE,
OV13850_REG_VALUE_24BIT,
ctrl->val << 4);
break;
case V4L2_CID_ANALOGUE_GAIN:
ret = ov13850_write_reg(ov13850->client,
OV13850_REG_GAIN_H,
OV13850_REG_VALUE_08BIT,
(ctrl->val >> OV13850_GAIN_H_SHIFT) &
OV13850_GAIN_H_MASK);
ret |= ov13850_write_reg(ov13850->client,
OV13850_REG_GAIN_L,
OV13850_REG_VALUE_08BIT,
ctrl->val & OV13850_GAIN_L_MASK);
break;
case V4L2_CID_VBLANK:
ret = ov13850_write_reg(ov13850->client,
OV13850_REG_VTS,
OV13850_REG_VALUE_16BIT,
ctrl->val + ov13850->cur_mode->height);
break;
case V4L2_CID_TEST_PATTERN:
ret = ov13850_enable_test_pattern(ov13850, ctrl->val);
break;
default:
dev_warn(&client->dev, "%s Unhandled id:0x%x, val:0x%x\n",
__func__, ctrl->id, ctrl->val);
break;
}
pm_runtime_put(&client->dev);
return ret;
}
static const struct v4l2_ctrl_ops ov13850_ctrl_ops = {
.s_ctrl = ov13850_set_ctrl,
};
static int ov13850_initialize_controls(struct ov13850 *ov13850)
{
const struct ov13850_mode *mode;
struct v4l2_ctrl_handler *handler;
struct v4l2_ctrl *ctrl;
s64 exposure_max, vblank_def;
u32 h_blank;
int ret;
handler = &ov13850->ctrl_handler;
mode = ov13850->cur_mode;
ret = v4l2_ctrl_handler_init(handler, 8);
if (ret)
return ret;
handler->lock = &ov13850->mutex;
ctrl = v4l2_ctrl_new_int_menu(handler, NULL, V4L2_CID_LINK_FREQ,
0, 0, link_freq_menu_items);
if (ctrl)
ctrl->flags |= V4L2_CTRL_FLAG_READ_ONLY;
v4l2_ctrl_new_std(handler, NULL, V4L2_CID_PIXEL_RATE,
0, OV13850_PIXEL_RATE, 1, OV13850_PIXEL_RATE);
h_blank = mode->hts_def - mode->width;
ov13850->hblank = v4l2_ctrl_new_std(handler, NULL, V4L2_CID_HBLANK,
h_blank, h_blank, 1, h_blank);
if (ov13850->hblank)
ov13850->hblank->flags |= V4L2_CTRL_FLAG_READ_ONLY;
vblank_def = mode->vts_def - mode->height;
ov13850->vblank = v4l2_ctrl_new_std(handler, &ov13850_ctrl_ops,
V4L2_CID_VBLANK, vblank_def,
OV13850_VTS_MAX - mode->height,
1, vblank_def);
exposure_max = mode->vts_def - 4;
ov13850->exposure = v4l2_ctrl_new_std(handler, &ov13850_ctrl_ops,
V4L2_CID_EXPOSURE, OV13850_EXPOSURE_MIN,
exposure_max, OV13850_EXPOSURE_STEP,
mode->exp_def);
ov13850->anal_gain = v4l2_ctrl_new_std(handler, &ov13850_ctrl_ops,
V4L2_CID_ANALOGUE_GAIN, OV13850_GAIN_MIN,
OV13850_GAIN_MAX, OV13850_GAIN_STEP,
OV13850_GAIN_DEFAULT);
ov13850->test_pattern = v4l2_ctrl_new_std_menu_items(handler,
&ov13850_ctrl_ops, V4L2_CID_TEST_PATTERN,
ARRAY_SIZE(ov13850_test_pattern_menu) - 1,
0, 0, ov13850_test_pattern_menu);
if (handler->error) {
ret = handler->error;
dev_err(&ov13850->client->dev,
"Failed to init controls(%d)\n", ret);
goto err_free_handler;
}
ov13850->subdev.ctrl_handler = handler;
return 0;
err_free_handler:
v4l2_ctrl_handler_free(handler);
return ret;
}
static int ov13850_check_sensor_id(struct ov13850 *ov13850,
struct i2c_client *client)
{
struct device *dev = &ov13850->client->dev;
u32 id = 0;
int ret;
int time=5;
while (time--){
ret = ov13850_read_reg(client, OV13850_REG_CHIP_ID,
OV13850_REG_VALUE_16BIT, &id);
if (id != CHIP_ID) {
dev_err(dev, "Unexpected sensor id(%06x), ret(%d)\n", id, ret);
if (time==1){
if(client->addr == OV13850_I2C_ADDR1)
client->addr = OV13850_I2C_ADDR0;
else
client->addr = OV13850_I2C_ADDR1;
}
udelay(10);
}
}
ret = ov13850_read_reg(client, OV13850_CHIP_REVISION_REG,
OV13850_REG_VALUE_08BIT, &id);
if (ret) {
dev_err(dev, "Read chip revision register error\n");
return ret;
}
if (id == OV13850_R2A)
ov13850_global_regs = ov13850_global_regs_r2a;
else
ov13850_global_regs = ov13850_global_regs_r1a;
dev_info(dev, "Detected OV%06x sensor, REVISION 0x%x\n", CHIP_ID, id);
return 0;
}
static int ov13850_configure_regulators(struct ov13850 *ov13850)
{
unsigned int i;
for (i = 0; i < OV13850_NUM_SUPPLIES; i++)
ov13850->supplies[i].supply = ov13850_supply_names[i];
return devm_regulator_bulk_get(&ov13850->client->dev,
OV13850_NUM_SUPPLIES,
ov13850->supplies);
}
static void free_gpio(struct ov13850 *ov13850)
{
dev_info(&ov13850->client->dev, "%s(%d) enter!\n", __func__, __LINE__);
if (IS_ERR(ov13850->pwdn_gpio)){
gpio_free(desc_to_gpio(ov13850->pwdn_gpio));
}
if (IS_ERR(ov13850->reset_gpio)){
gpio_free(desc_to_gpio(ov13850->reset_gpio));
}
}
static int ov13850_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct device *dev = &client->dev;
struct device_node *node = dev->of_node;
struct ov13850 *ov13850;
struct v4l2_subdev *sd;
char facing[2];
int ret;
struct gpio_desc *pwdn_gpios = NULL, *reset_gpios = NULL;
unsigned int pwdn = -1, reset = -1;
enum of_gpio_flags flags;
dev_info(dev, "driver version: %02x.%02x.%02x",
DRIVER_VERSION >> 16,
(DRIVER_VERSION & 0xff00) >> 8,
DRIVER_VERSION & 0x00ff);
ov13850 = devm_kzalloc(dev, sizeof(*ov13850), GFP_KERNEL);
if (!ov13850)
return -ENOMEM;
ret = of_property_read_u32(node, RKMODULE_CAMERA_MODULE_INDEX,
&ov13850->module_index);
ret |= of_property_read_string(node, RKMODULE_CAMERA_MODULE_FACING,
&ov13850->module_facing);
ret |= of_property_read_string(node, RKMODULE_CAMERA_MODULE_NAME,
&ov13850->module_name);
ret |= of_property_read_string(node, RKMODULE_CAMERA_LENS_NAME,
&ov13850->len_name);
if (ret) {
dev_err(dev, "could not get module information!\n");
return -EINVAL;
}
ov13850->client = client;
ov13850->cur_mode = &supported_modes[0];
ret = of_property_read_u32(node, "firefly,clkout-enabled-index", &clkout_enabled_index);
if (ret){
dev_err(dev, "could not get firefly,clkout-enabled-index, default output xvclk .");
clkout_enabled_index = 1;
}
if (clkout_enabled_index){
ov13850->xvclk = devm_clk_get(dev, "xvclk");
if (IS_ERR(ov13850->xvclk)) {
dev_err(dev, "Failed to get xvclk\n");
return -EINVAL;
}
}
ov13850->power_gpio = devm_gpiod_get(dev, "power", GPIOD_OUT_LOW);
if (IS_ERR(ov13850->power_gpio))
dev_warn(dev, "Failed to get power-gpios, maybe no use\n");
ov13850->reset_gpio = devm_gpiod_get(dev, "reset", GPIOD_OUT_LOW);
if (IS_ERR(ov13850->reset_gpio)) {
dev_info(dev, "Failed to get reset-gpios, maybe no use\n");
reset = of_get_named_gpio_flags(node, "reset-gpios", 0, &flags);
reset_gpios = gpio_to_desc(reset);
if (IS_ERR(reset_gpios))
dev_info(dev, "Failed to get reset-gpios again\n");
else
ov13850->reset_gpio = reset_gpios;
}
ov13850->pwdn_gpio = devm_gpiod_get(dev, "pwdn", GPIOD_OUT_LOW);
if (IS_ERR(ov13850->pwdn_gpio)) {
dev_info(dev, "Failed to get pwdn-gpios, maybe no use\n");
pwdn = of_get_named_gpio_flags(node, "pwdn-gpios", 0, &flags);
pwdn_gpios = gpio_to_desc(pwdn);
if (IS_ERR(pwdn_gpios))
dev_info(dev, "Failed to get pwdn-gpios again\n");
else
ov13850->pwdn_gpio = pwdn_gpios;
}
ret = ov13850_configure_regulators(ov13850);
if (ret) {
dev_err(dev, "Failed to get power regulators\n");
return ret;
}
ov13850->pinctrl = devm_pinctrl_get(dev);
if (!IS_ERR(ov13850->pinctrl)) {
ov13850->pins_default =
pinctrl_lookup_state(ov13850->pinctrl,
OF_CAMERA_PINCTRL_STATE_DEFAULT);
if (IS_ERR(ov13850->pins_default))
dev_err(dev, "could not get default pinstate\n");
ov13850->pins_sleep =
pinctrl_lookup_state(ov13850->pinctrl,
OF_CAMERA_PINCTRL_STATE_SLEEP);
if (IS_ERR(ov13850->pins_sleep))
dev_err(dev, "could not get sleep pinstate\n");
}
mutex_init(&ov13850->mutex);
sd = &ov13850->subdev;
v4l2_i2c_subdev_init(sd, client, &ov13850_subdev_ops);
ret = ov13850_initialize_controls(ov13850);
if (ret)
goto err_destroy_mutex;
ret = __ov13850_power_on(ov13850);
if (ret)
goto err_free_handler;
ret = ov13850_check_sensor_id(ov13850, client);
if (ret)
goto err_power_off;
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
sd->internal_ops = &ov13850_internal_ops;
sd->flags |= V4L2_SUBDEV_FL_HAS_DEVNODE;
#endif
#if defined(CONFIG_MEDIA_CONTROLLER)
ov13850->pad.flags = MEDIA_PAD_FL_SOURCE;
sd->entity.function = MEDIA_ENT_F_CAM_SENSOR;
ret = media_entity_pads_init(&sd->entity, 1, &ov13850->pad);
if (ret < 0)
goto err_power_off;
#endif
memset(facing, 0, sizeof(facing));
if (strcmp(ov13850->module_facing, "back") == 0)
facing[0] = 'b';
else
facing[0] = 'f';
snprintf(sd->name, sizeof(sd->name), "m%02d_%s_%s %s",
ov13850->module_index, facing,
OV13850_NAME, dev_name(sd->dev));
ret = v4l2_async_register_subdev_sensor_common(sd);
if (ret) {
dev_err(dev, "v4l2 async register subdev failed\n");
goto err_clean_entity;
}
pm_runtime_set_active(dev);
pm_runtime_enable(dev);
pm_runtime_idle(dev);
return 0;
err_clean_entity:
#if defined(CONFIG_MEDIA_CONTROLLER)
media_entity_cleanup(&sd->entity);
#endif
err_power_off:
__ov13850_power_off(ov13850);
free_gpio(ov13850);
err_free_handler:
v4l2_ctrl_handler_free(&ov13850->ctrl_handler);
err_destroy_mutex:
mutex_destroy(&ov13850->mutex);
return ret;
}
static int ov13850_remove(struct i2c_client *client)
{
struct v4l2_subdev *sd = i2c_get_clientdata(client);
struct ov13850 *ov13850 = to_ov13850(sd);
v4l2_async_unregister_subdev(sd);
#if defined(CONFIG_MEDIA_CONTROLLER)
media_entity_cleanup(&sd->entity);
#endif
v4l2_ctrl_handler_free(&ov13850->ctrl_handler);
mutex_destroy(&ov13850->mutex);
pm_runtime_disable(&client->dev);
if (!pm_runtime_status_suspended(&client->dev))
__ov13850_power_off(ov13850);
pm_runtime_set_suspended(&client->dev);
return 0;
}
#if IS_ENABLED(CONFIG_OF)
static const struct of_device_id ov13850_of_match[] = {
{ .compatible = "ovti,ov13850" },
{},
};
MODULE_DEVICE_TABLE(of, ov13850_of_match);
#endif
static const struct i2c_device_id ov13850_match_id[] = {
{ "ovti,ov13850", 0 },
{ },
};
static struct i2c_driver ov13850_i2c_driver = {
.driver = {
.name = OV13850_NAME,
.pm = &ov13850_pm_ops,
.of_match_table = of_match_ptr(ov13850_of_match),
},
.probe = &ov13850_probe,
.remove = &ov13850_remove,
.id_table = ov13850_match_id,
};
static int __init sensor_mod_init(void)
{
return i2c_add_driver(&ov13850_i2c_driver);
}
static void __exit sensor_mod_exit(void)
{
i2c_del_driver(&ov13850_i2c_driver);
}
device_initcall_sync(sensor_mod_init);
module_exit(sensor_mod_exit);
MODULE_DESCRIPTION("OmniVision ov13850 sensor driver");
MODULE_LICENSE("GPL v2");
参考资料:
http://www.friendlyelec.com.cn/agent.asp
http://www.friendlyelec.com.cn/
https://download.friendlyelec.com/NanoPC-T4
https://wiki.friendlyelec.com/wiki/index.php/NanoPC-T4/zh#.E4.B8.8B.E8.BD.BDAndroid10.E6.BA.90.E4.BB.A3.E7.A0.81
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.37562e8dcotDm6&id=570312633249&_u=7ju3ku004a
友善NanoPC-T4瑞芯微RK3399开发板ROS双摄4K播放开源AI智能安卓10
WiKi维基教程(固件介绍,使用说明,操作步骤等)
http://wiki.friendlyelec.com/wiki/index.php/NanoPC-T4
系统固件下载
https://dl.friendlyelec.com/nanopct4
原理图(pdf格式)
http://wiki.friendlyelec.com/wiki/images/e/e0/NanoPC-T4-1902-Schematic.pdf
尺寸图(dxf格式)
http://wiki.friendlyelec.com/wiki/images/b/bc/NanoPC-T4_1802_Drawing%28dxf%29.zip
http://www.friendlyelec.com.cn/nanopi-m4.asp
NanoPi M4 | NanoPi M4V2
https://wiki.friendlyelec.com/wiki/index.php/NanoPi_M4/zh
15.3 编译Android10源代码
15.3.1 下载Android10源代码
有以下两种途径获取 Android10 的源代码,都需要联网:
使用网盘里的git repo压缩包
网盘下载地址: 点击进入
https://download.friendlyelec.com/NanoPiM4
https://pan.baidu.com/share/init?surl=oBLn9H31hILJKEPQXgrUog
提取码:yn6r