I.MX8QM flexcan移植
Android SDK:imx8_13.0.0_1.2.0(android 13 + u-boot 2022.04 + kernel 5.15.74)
一、kernel
内核配置:
# 相应的defconfig中添加使能下面两个宏。
# 官方默认的配置可能是以模块的方式编译,这里直接将can驱动编译到内核中
CONFIG_CAN=y
CONFIG_CAN_FLEXCAN=y
设备树修改:
# 因为板子未用到"xceiver-supply",所以注释掉了
&flexcan1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_flexcan1>;
status = "okay";
};
&flexcan2 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_flexcan2>;
status = "okay";
};
&flexcan3 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_flexcan3>;
status = "okay";
};
编译重新烧写镜像后,通过“ifconfig -a”查不到can0~can2,can未正常驱动。uboot中打印如下log:
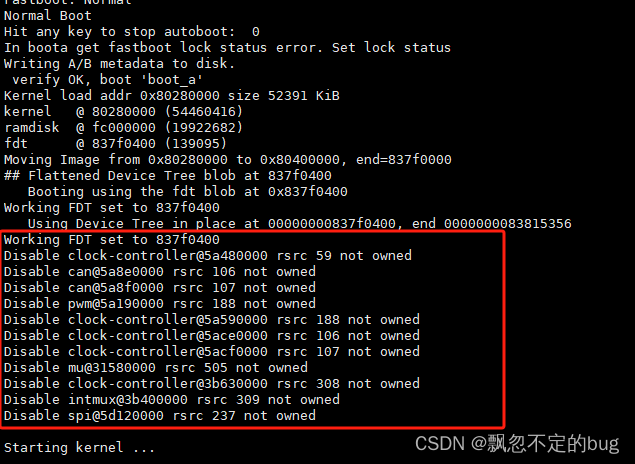
进入内核读取下面的节点信息,可以看到“status”被设置成了“disabled”。
cat /sys/firmware/devicetree/base/bus@5a000000/can@5a8d0000/status
cat /sys/firmware/devicetree/base/bus@5a000000/can@5a8e0000/status
cat /sys/firmware/devicetree/base/bus@5a000000/can@5a8f0000/status
二、u-boot
通过上面uboot的log可以在uboot的源码中查找到如下代码:
arch/arm/mach-imx/imx8/fdt.c的update_fdt_with_owned_resources函数。

先尝试跳过这段代码(暴力注释掉或者定义“CONFIG_SKIP_RESOURCE_CHECKING”宏)看看问题是否能解决,结果虽然dts节点的"status"都是"okay",但是can已然有问题,内核中也会打印如下错误:
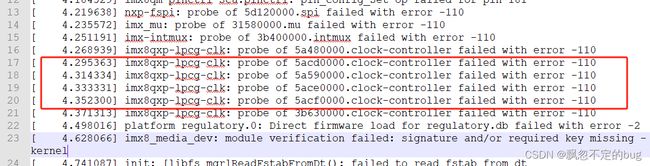
这里5acd0000地址对应can0_lpcg,5ace0000地址对应can1_lpcg,5acf0000地址对应can2_lpcg(dts中可以找到),看来上面的暴力修改行不通。
通过对u-boot的代码分析,可以看到主要原因就在"check_owned_resource(rsrc_id)"中,这个函数实际调用的是“sc_rm_is_resource_owned(-1, rsrc_id)”。至于为什么要移除有些资源呢,那是因为imx8qm包含m4核,而这些资源被设置成M4核使用。所以我们需要从M4核中将这些资源释放,以供linux内核使用。
三.SCU(System Control Unit)
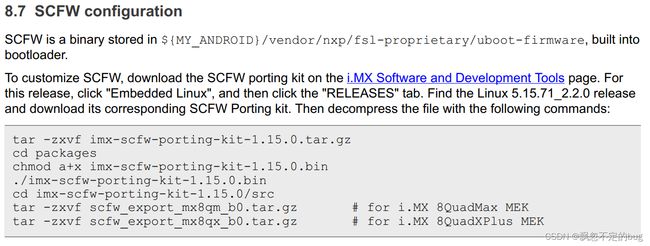
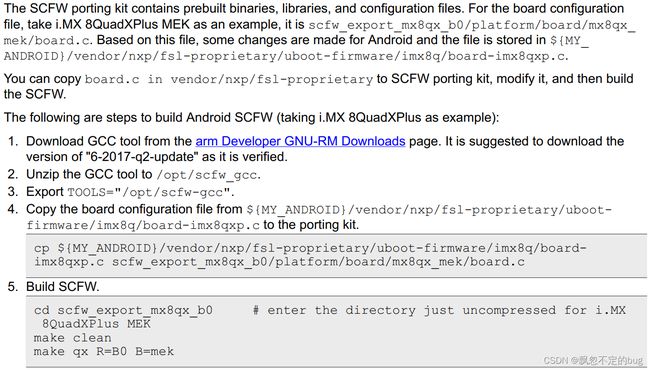
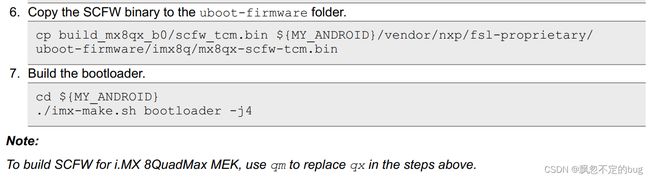
上面已经分析到是因为M4核的影响,导致can无法正常驱动。下面就看看can在什么地方被分配给我m4核,通过“sc_rm_is_resource_owned” 名称看出肯定和sc(System Control)有关。sc的设置是在“scfw_tcm.bin”这个程序中进行的,另外对于pmic的配置也是在这个程序中完成的。“scfw_tcm.bin”是一个二进制程序文件,系统编译时被打包到flash.bin的32K字节位置。源码可以在NXP的官网上找到,其下载编译过程可参考参考《Android_User’s_Guide.pdf》中“8.7 SCFW configure”章节的步骤进行操作。
i.MX Software and Development Tools:https://www.nxp.com/design/design-center/software/embedded-software/i-mx-software/android-os-for-i-mx-applications-processors:IMXANDROID
arm Developer GNU-RM Downloads:https://developer.arm.com/downloads/-/gnu-rm
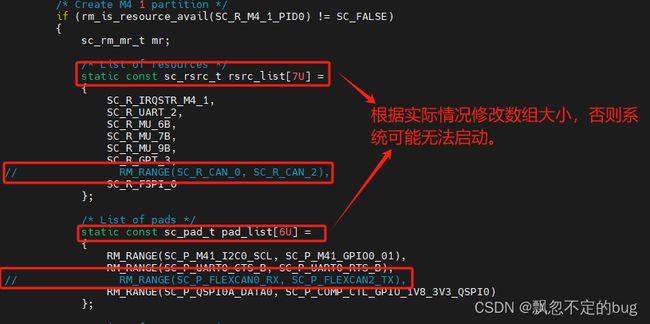
scfw修改:
在“platform/board/mx8qm_mek/board.c”中找到“board_system_config”函数,注释掉“RM_RANGE(SC_R_CAN_0, SC_R_CAN_2)”和“RM_RANGE(SC_P_FLEXCAN0_RX, SC_P_FLEXCAN2_TX)”并修改相应数组的大小。
接下来重新编译,将scfw编译生成的“scfw_tcm.bin”替换SDK目录下的“vendor/nxp/fsl-proprietary/uboot-firmware/imx8q/mx8qm-scfw-tcm.bin”。在重新编译bootloader,烧写后“ifconfig -a”就可以看到can0~can2了。uboot的log中看到也不在“disabled”掉can了。
四.CAN应用程序编译
下载软件包
libsocketcan:https://public.pengutronix.de/software/libsocketcan/
canutils:https://public.pengutronix.de/software/socket-can/canutils/
解压‘libsocketcan-0.0.12.tar.bz2’和‘canutils-4.0.6.tar.bz2’到sdk的’external/'目录下。
在解压的libsocketcan-0.0.12下创建Android.bp,内容如下:
cc_library_static {
name: "libsocketcan",
host_supported: true,
target: {
darwin: {
enabled: false,
},
},
local_include_dirs: ["include"],
cflags: [
"-Werror",
"-Wno-pointer-arith",
"-Wno-pointer-sign",
],
srcs: [
"src/libsocketcan.c",
],
export_include_dirs: ["include"],
}
在解压的canutils-4.0.6下创建Android.bp,内容如下:
cc_defaults {
name: "canutils_common_defaults",
cflags: [
"-Wall",
"-Werror",
"-Wno-unused-parameter",
"-Wno-unused-value",
"-Wno-sign-compare",
],
local_include_dirs: ["include"],
}
cc_binary {
name: "candump",
defaults: ["canutils_common_defaults"],
srcs: [
"src/candump.c",
],
static_libs: ["libsocketcan"],
}
cc_binary {
name: "cansend",
defaults: ["canutils_common_defaults"],
srcs: [
"src/cansend.c",
],
static_libs: ["libsocketcan"],
}
cc_binary {
name: "cansequence",
defaults: ["canutils_common_defaults"],
srcs: [
"src/cansequence.c",
],
static_libs: ["libsocketcan"],
}
cc_binary {
name: "canecho",
defaults: ["canutils_common_defaults"],
srcs: [
"src/canecho.c",
],
static_libs: ["libsocketcan"],
}
cc_binary {
name: "canconfig",
defaults: ["canutils_common_defaults"],
srcs: [
"src/canconfig.c",
],
static_libs: ["libsocketcan"],
}
说明:Android.bp中添加注释用’//'。
重新编译系统这时可能会报“fatal error: ‘can_config.h’ file not found”错误,如下:

“can_config.h”文件是Cmake工程执行编译配置后生成一个配置文件,因为这里并没有用到Cmake去编译所以,没有生成这个文件,可以把canutils-4.0.6源码复制到其它主机上,执行一下Cmake的配置过程就会生成这个文件,然后复制这个文件到canutils-4.0.6源码下的include目录就行。
五.FlexCan通信测试
这里通过can0和can1对发来测试CAN通信。
接线:
CAN0_L -> CAN1_L
CAN0_H -> CAN1_H
ip link set can0 up type can bitrate 125000 #配置can波特率,如果有错误可以先 ifconfig can0 down
ifconfig can0 up
candump can0 &
ip link set can1 up type can bitrate 125000 #配置can波特率
ifconfig can1 up
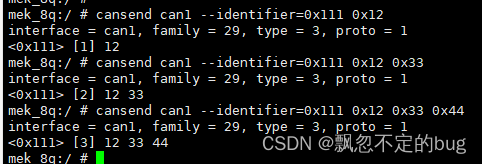
cansend can1 --identifier=0x111 0x12 0x23 0x56 0x78
测试结果:
参考:
https://www.wpgdadatong.com.cn/blog/detail/43922
https://blog.csdn.net/liteblue/article/details/123061488