树莓派4B-Python-控制TB6612FNG
文章目录
- 前言
- 一、TB6612FNG模块介绍
- 二、接线图
- 三、代码
-
- 1.使用的一代程序(仅针对本人小车)
- 2.使用的二代程序(仅针对本人小车)
- 总结(可跳过的废话)
前言
毕业工作后比较无聊,就给自己找了点事情做:做一辆比之前毕设时功能更强大的智能小车。所以呢买了一个车架与12V的电机,因此用到了TB6612FNG模块,现在想想,其实继续用L298N好像也不是不可以,但就怕L298N承受不住3A的峰值电流。
一、TB6612FNG模块介绍
- VCC == 2.7V~5.5V
- VM == 4.5V~15V
- 电流 == 1.2A恒流 / 3.2A峰值
- PWMA、PWMB接入GPIO中使用PWM控制
- AIN1、AIN2、BIN1、BIN2通过“一端高电平一端低电平”来控制电机正反转或停止
(例如,假设AIN1输入1,AIN2输入0,那么AO1则输出正电压,AO2输出负电压,所以电机1正转) - STBY可以理解为TB6612FNG模块的总开关。当STBY置于高电平时,AIN1、AIN2、BIN1、BIN2才可以控制电机正反转;当STBY置于低电平时,电机全部停止。一般将其常置于高电平即可(端口直接接到3.3V上)
TB6612FNG模块与L298N模块类似,都是可用于控制直流电机的速度和方向,但TB6612FNG可流过的恒定电流为1.2A,峰值3.2A,并比大多数的L298N更迷你,虽然需要接入的引脚更多了,共16个。
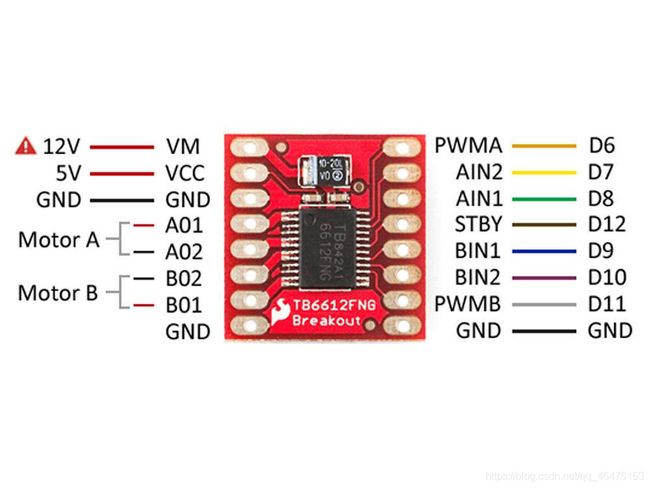
二、接线图

(上图中最下面的两个GND其实在内部是相连的,但与上面单独的GND是不相连的,外部12V电源接到最下面两个GND中任意一个都可以)

三、代码
代码如下(示例):
1.使用的一代程序(仅针对本人小车)
import RPi.GPIO as GPIO
import time
P1_PWMA = 16
P1_AIN1 = 21
P1_AIN2 = 20
P1_PWMB = 26
P1_BIN1 = 13
P1_BIN2 = 19
P1 = [P1_PWMA, P1_AIN1, P1_AIN2,
P1_PWMB, P1_BIN1, P1_BIN2]
P2_PWMA = 10
P2_AIN1 = 11
P2_AIN2 = 9
P2_PWMB = 12
P2_BIN1 = 5
P2_BIN2 = 6
P2 = [P2_PWMA, P2_AIN1, P2_AIN2,
P2_PWMB, P2_BIN1, P2_BIN2]
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(P1,GPIO.OUT)
GPIO.setup(P2,GPIO.OUT)
L_Up_Motor= GPIO.PWM(P2_PWMA,10000)
L_Up_Motor.start(0)
L_Down_Motor = GPIO.PWM(P2_PWMB,10000)
L_Down_Motor.start(0)
R_Up_Motor= GPIO.PWM(P1_PWMA,10000)
R_Up_Motor.start(0)
R_Down_Motor = GPIO.PWM(P1_PWMB,10000)
R_Down_Motor.start(0)
#停止
def t_stop(t_time):
GPIO.output(P2_AIN2,0) #AIN2 AIN为左后轮
GPIO.output(P2_AIN1,0) #AIN1
GPIO.output(P2_BIN2,0) #BIN2 BIN为左前轮
GPIO.output(P2_BIN1,0) #BIN1
GPIO.output(P1_AIN2,0) #AIN2 AIN为右前轮
GPIO.output(P1_AIN1,0) #AIN1
GPIO.output(P1_BIN2,0) #BIN2 BIN为右后轮
GPIO.output(P1_BIN1,0) #BIN1
L_Up_Motor.ChangeDutyCycle(0)
L_Down_Motor.ChangeDutyCycle(0)
R_Up_Motor.ChangeDutyCycle(0)
R_Down_Motor.ChangeDutyCycle(0)
time.sleep(t_time)
#前进
def t_up(speed,t_time):
GPIO.output(P2_AIN2,0) #AIN2 AIN为左后轮
GPIO.output(P2_AIN1,1) #AIN1
GPIO.output(P2_BIN2,1) #BIN2 BIN为左前轮
GPIO.output(P2_BIN1,0) #BIN1
GPIO.output(P1_AIN2,1) #AIN2 AIN为右前轮
GPIO.output(P1_AIN1,0) #AIN1
GPIO.output(P1_BIN2,0) #BIN2 BIN为右后轮
GPIO.output(P1_BIN1,1) #BIN1
L_Up_Motor.ChangeDutyCycle(speed)
L_Down_Motor.ChangeDutyCycle(speed)
R_Up_Motor.ChangeDutyCycle(speed)
R_Down_Motor.ChangeDutyCycle(speed)
time.sleep(t_time)
#后退
def t_down(speed,t_time):
GPIO.output(P2_AIN2,1) #AIN2 AIN为左后轮
GPIO.output(P2_AIN1,0) #AIN1
GPIO.output(P2_BIN2,0) #BIN2 BIN为左前轮
GPIO.output(P2_BIN1,1) #BIN1
GPIO.output(P1_AIN2,0) #AIN2 AIN为右前轮
GPIO.output(P1_AIN1,1) #AIN1
GPIO.output(P1_BIN2,1) #BIN2 BIN为右后轮
GPIO.output(P1_BIN1,0) #BIN1
L_Up_Motor.ChangeDutyCycle(speed)
L_Down_Motor.ChangeDutyCycle(speed)
R_Up_Motor.ChangeDutyCycle(speed)
R_Down_Motor.ChangeDutyCycle(speed)
time.sleep(t_time)
#左转
def t_left(speed,t_time):
GPIO.output(P2_AIN2,0) #AIN2 AIN为左后轮
GPIO.output(P2_AIN1,0) #AIN1
GPIO.output(P2_BIN2,0) #BIN2 BIN为左前轮
GPIO.output(P2_BIN1,0) #BIN1
GPIO.output(P1_AIN2,1) #AIN2 AIN为右前轮
GPIO.output(P1_AIN1,0) #AIN1
GPIO.output(P1_BIN2,0) #BIN2 BIN为右后轮
GPIO.output(P1_BIN1,1) #BIN1
L_Up_Motor.ChangeDutyCycle(speed)
L_Down_Motor.ChangeDutyCycle(speed)
R_Up_Motor.ChangeDutyCycle(speed)
R_Down_Motor.ChangeDutyCycle(speed)
time.sleep(t_time)
#右转
def t_right(speed,t_time):
GPIO.output(P2_AIN2,0) #AIN2 AIN为左后轮
GPIO.output(P2_AIN1,1) #AIN1
GPIO.output(P2_BIN2,1) #BIN2 BIN为左前轮
GPIO.output(P2_BIN1,0) #BIN1
GPIO.output(P1_AIN2,0) #AIN2 AIN为右前轮
GPIO.output(P1_AIN1,0) #AIN1
GPIO.output(P1_BIN2,0) #BIN2 BIN为右后轮
GPIO.output(P1_BIN1,0) #BIN1
L_Up_Motor.ChangeDutyCycle(speed)
L_Down_Motor.ChangeDutyCycle(speed)
R_Up_Motor.ChangeDutyCycle(speed)
R_Down_Motor.ChangeDutyCycle(speed)
time.sleep(t_time)
try:
while True:
t_up(50,3)
t_down(50,3)
t_left(50,3)
t_right(50,3)
t_stop(3)
except KeyboardInterrupt:
GPIO.cleanup()
2.使用的二代程序(仅针对本人小车)
import RPi.GPIO as GPIO
import time
# AIN为右前轮
P1_PWMA, P1_AIN1, P1_AIN2 = 16, 21, 20
# BIN为右后轮
P1_PWMB, P1_BIN1, P1_BIN2 = 26, 13, 19
# AIN为左后轮
P2_PWMA, P2_AIN1, P2_AIN2 = 10, 11, 9
# BIN为左前轮
P2_PWMB, P2_BIN1, P2_BIN2 = 12, 5, 6
P1 = [P1_PWMA, P1_AIN1, P1_AIN2,
P1_PWMB, P1_BIN1, P1_BIN2]
P2 = [P2_PWMA, P2_AIN1, P2_AIN2,
P2_PWMB, P2_BIN1, P2_BIN2]
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(P1,GPIO.OUT)
GPIO.setup(P2,GPIO.OUT)
#PWM使用10000Hz的频率效果较好,输入的调速区间为0~100,但调速为5左右时也是可以移动的
L_Up_Motor= GPIO.PWM(P2_PWMA,10000)
L_Up_Motor.start(0)
L_Down_Motor = GPIO.PWM(P2_PWMB,10000)
L_Down_Motor.start(0)
R_Up_Motor= GPIO.PWM(P1_PWMA,10000)
R_Up_Motor.start(0)
R_Down_Motor = GPIO.PWM(P1_PWMB,10000)
R_Down_Motor.start(0)
Diretion = [
[0,0, 0,0, 0,0, 0,0],
[0,1, 1,0, 1,0, 0,1],
[1,0, 0,1, 0,1, 1,0],
[0,0, 0,0, 1,0, 0,1],
[1,0, 0,1, 0,0, 0,0]
]
def DIRETION(diretion, speed, t_time):
GPIO.output(P2_AIN2,diretion[0]) #AIN2 AIN为左后轮
GPIO.output(P2_AIN1,diretion[1]) #AIN1
GPIO.output(P2_BIN2,diretion[2]) #BIN2 BIN为左前轮
GPIO.output(P2_BIN1,diretion[3]) #BIN1
GPIO.output(P1_AIN2,diretion[4]) #AIN2 AIN为右前轮
GPIO.output(P1_AIN1,diretion[5]) #AIN1
GPIO.output(P1_BIN2,diretion[6]) #BIN2 BIN为右后轮
GPIO.output(P1_BIN1,diretion[7]) #BIN1
afga(0,51,t_time,1)
# time.sleep(8)
afga(50,-1,t_time,-1)# 用于逐渐减速
def afga(minn, maxx, t_time, sleepp):
for p in range(minn, maxx, sleepp):
print(p)
L_Up_Motor.ChangeDutyCycle(p)
L_Down_Motor.ChangeDutyCycle(p)
R_Up_Motor.ChangeDutyCycle(p)
R_Down_Motor.ChangeDutyCycle(p)
time.sleep(t_time)
try:
while True:
cmd = input("按以下键后回车(w,前进;x,后退;s,停止):")
A = {'t': 0, 'w':1, 's':2, 'a':3,'d':4}
if cmd in ['w','s','a','d','q','e','t']:
a = A[cmd]
DIRETION(Diretion[a],10,0.1) # 这里的10(即控制的速度speed)已经没了作用,已被取代
afga(50,-1,0.1,-10)
else:
break
except KeyboardInterrupt:
GPIO.cleanup()
except KeyError:
print('KeyError')
总结(可跳过的废话)
曾经本人写的代码太太太过于简单,甚至可以说是简陋。虽然也可以实现这些功能,但代码是又臭又长反反复复,现经“高人”指点一二后,代码勉强可以直视了,对伐?
同时记录一下为这应该不会太智障的小车莫名其妙辛苦奋斗的日子,期待着它的诞生,赋其名曰——V4 car。
2021.01.20————今年年前购买各种材料;
2021.02.11————过年期间研究车架组装与各个部位该摆放什么功能配件;
2021.03.01————之后设计电源选型、布线、布局、主控摆放等;
2021.03.15————第一次将驱动程序写好,因思路卡壳没了灵感颓废了差不多一个月,转去研究OpenCV的书籍;
2021.04.15————心血来潮的又重新去研究这“破”车,嘿嘿,把避障的部分功能实现的程序搞出来了,期间用到了OpenMV来实现超声波测距,结果卡在了OpenMV与树莓派4B通信上,再接着试着通信的问题然后一个重启树莓派…这张SD卡装的系统就这么废了,试多少遍也开不了机,一夜之间除了超声波测距的程序其他全没了,连装好的环境、库也没了。这个事件再次告诉我:程序不备份 == 给自己找事做;
2021.04.25————经两天晚上那有待提升的努力,终于又把驱动程序弄出来了,其中的BUG还是有一些的,在优化的方面比较花时间;
2021.05.08————突发奇想想搞一搞最近买的但又总被遗忘的小玩意:温度传感器、人体红外感应模块、OLED 屏幕。于是它们的研究与成果就诞生了;树莓派4B-Python-控制DS18B20(温度传感器)
2021.05.09————树莓派4B-Python-控制HC_SR501(微型人体红外感应模块)
2021.05.09————树莓派4B-Python-使用SSD1306 OLED
2021.05.10————树莓派4B-Python-使用SSD1306 OLED与DS18B20温度传感器-增强版
今后————…
但愿今年能够把它给全部完成…
##2021.5.02 希望以上代码对大家有所帮助!