控制网平差(C++实现)
目录
一、需求分析
二、系统设计
三、原理
1、坐标概算
2、最小二乘平差
四、代码
类设计:
CAngle:
CCTRLPOINT:
CMatrix:
CErrorElipseDrow:
ControlNet:
CPP文件:
CAngle.cpp
CMatrix.cpp
CErrorElipseDrow.cpp
ControlNet.cpp
五、界面设计
六、总结
一、需求分析
导线网平差计算步骤十分繁琐且计算量大,人工计算不仅耗时长而且还容易运算错误,并且对于一些较为复杂的控制网,随着未知数的个数增多,误差方程的系数阵和常数阵也随之增大,此时人工计算就很难进行下去了。
随着计算机技术的普及和发展,人们把计算机的强大算力运用到我们的测绘学科里边,推动了测绘行业的飞速发展。为解决人工平差计算耗时长,计算量大,计算准确度不高的问题,平差程序也就随之孕育而生。
麻雀虽小,五脏俱全,作为一个简易的平差小程序,它仍应该具有以下功能:
1、平差计算:即通过输入边角观测数据列立误差方程,计算待定点坐标;
2、精度评定:评定观测精度以及待定点的点位精度;
3、控制网和误差椭圆绘制:根据输入数据的边角关系,绘制相应的控制网,让使用者明确导线网的布设形状及点位误差的分布规律。
二、系统设计

三、原理
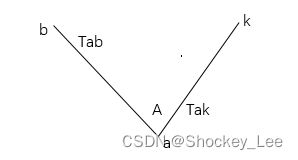
1、坐标概算
![]()
![]()
其中k为待定点,a为与k有距离和角度观测关系的已知点,b为与a有角度观测的另一已知点。
![]() 的计算为:
的计算为:
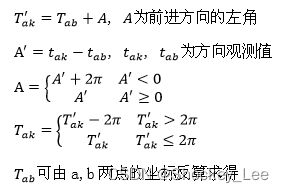
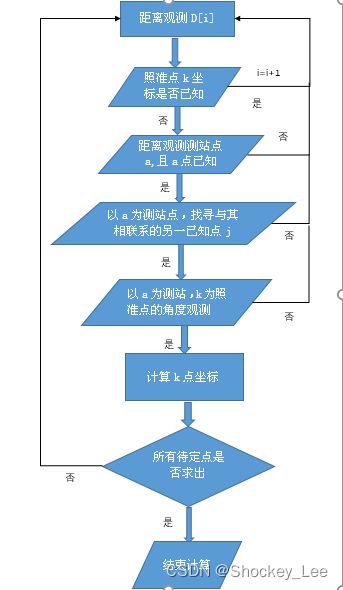
逐点解算法:选择已知点或已计算出坐标的点作为起算点,根据具体的图形,逐个推算出各点的坐标。
计算步骤:
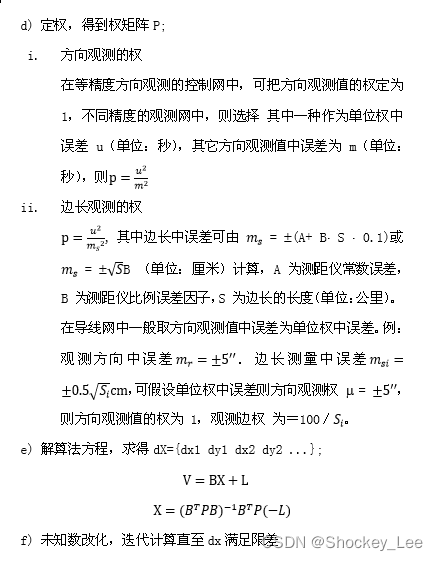
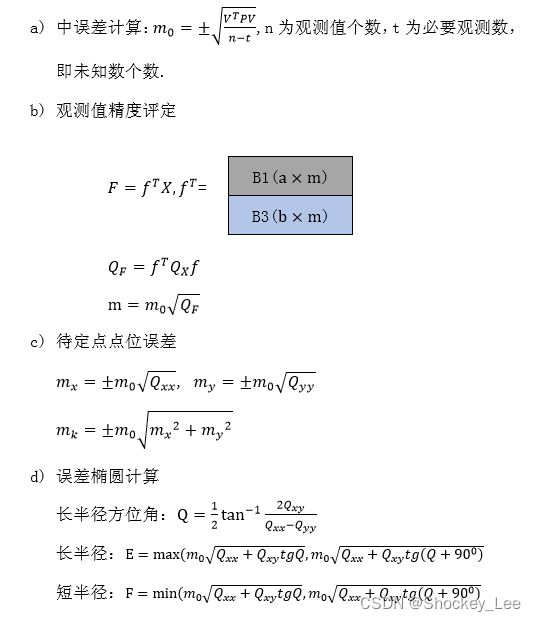
2、最小二乘平差

四、代码
类设计:

CAngle:
角度类,用于角度的DEG\RAD\DMS转换
#pragma once
//枚举数据类型,用于代表角度形式
enum AngleStyle
{
DEG,
DMS,
RAD
};
//角度类,可用于角度不同类型的转换
class CAngle
{
public:
CAngle(double value = 0, AngleStyle style = DMS);
~CAngle(void);
private:
double dValue;//角度值
AngleStyle nCurStyle;//当前角度值类型
private:
//设置常成员函数的作用:1.类成员不会被改变
//2.可以被常类变量调用
double Deg(double dDms) const;
double Dms(double dDeg) const;
public:
//获取指定的类型获取角度值,
//由于返回的是dValue的引用,所以该值大小可以改变,即可以进行赋值
double& operator() (AngleStyle style);
//重载,获取指定的类型获取角度值,该值不可改变,const CAngle类型变量调用
double operator() (AngleStyle style) const;
//重载运算符+/-
friend CAngle operator + (const CAngle& m1, const CAngle& m2);
friend CAngle operator - (const CAngle& m1, const CAngle& m2);
};
CCTRLPOINT:
观测边、观测角、测站、控制点的数据结构设计类
数据类的设计关系到后续程序编写的难易程度,各位读者可以在此类的基础上加以优化,好的数据结构可以达到事半功倍的的效果。推荐使用指针进行数据操作,避免后续对坐标进行修改时出现部分修改的情形。
#pragma once
#include "Angle.h"
#include"CErrorElipseDrow.h"
//控制点类,主要包括观测角度类、观测边长类及控制点类
class CCTRLPOINT
{
public:
double X, Y;//控制点坐标
CString strID;//控制点编号
bool type=FALSE;//点的类型,若为已知点则为true,若为未知点则为FALSE
bool tag = FALSE;//标识符,如果已经经过坐标概算得到了近似坐标,则tag值为真
double dE, dF;//误差椭圆的长短半轴
double dAlfa;//误差椭圆长半轴方位角
double dP;//点位误差
CErrorElipseDrow EDRAW;//误差椭圆绘制
//构造函数
CCTRLPOINT()
{
X = Y = 0;
strID = _T("");
dE = dF = dAlfa = 0;
dP = 0;
}
~CCTRLPOINT() {};//析构函数
};
//方向观测类
class CObsDirection
{
public:
CObsDirection() { ObsAngle = 0; cpST = NULL; cpOB = NULL; m = 0; };
~CObsDirection()
{
if (cpST != NULL)
cpST = NULL;
if (cpOB != NULL)
cpOB = NULL;
};
public:
CCTRLPOINT* cpST;//测站点
CCTRLPOINT* cpOB;//照准点
CAngle ObsAngle;//方向观测角度
double m;
};
//距离观测类
class CObsDist
{
public:
CObsDist() { Dist = 0; cpBG = NULL; cpEND = NULL; m = 0; };
~CObsDist()
{
if (cpBG != NULL)
cpBG = NULL;
if (cpEND != NULL)
cpEND = NULL;
};
public:
CCTRLPOINT* cpBG;//起始点
CCTRLPOINT* cpEND;//终点
double Dist;//观测距离
double m;//中误差
};
//测站类(储存站点信息,以及初始方向角)
class STATION
{
public:
CCTRLPOINT* station;//观测测站
CCTRLPOINT* start;//定向边所在的照准站
CAngle st_;
STATION()
{
station = NULL;
start = NULL;
};
~STATION()
{
if (station != NULL)
station = NULL;
if (start != NULL)
start = NULL;
};
};CMatrix:
矩阵类,包括矩阵的转置、乘法、求逆计算
#pragma once
//矩阵类,用于矩阵运算(加、减、乘、求逆)
class CMatrix
{
public:
CMatrix(int row = 3, int col = 3);
// copy constructor
CMatrix(const CMatrix& m);
~CMatrix(void);
private:
double** dMatData;//保存矩阵元素数据的二维数组
int iRow;//矩阵的行
int iCol;//矩阵的列
public:
int Row() const { return iRow; }//返回行
int Col() const { return iCol; }//返回列
void SetSize(int row, int col);//调整数组的大小,原有数据不变(未测试)
void ReSize(int row, int col);//调整数组大小,清空数据
double& operator () (int row, int col);//获取矩阵元素
double operator () (int row, int col) const;//重载获取矩阵元素函数,只有const对象能访问
CMatrix& operator = (const CMatrix& m);
//注意:友元函数并不是类自己的成员函数
friend CMatrix operator + (const CMatrix& m1, const CMatrix& m2);
friend CMatrix operator - (const CMatrix& m1, const CMatrix& m2);
friend CMatrix operator * (const CMatrix& m1, const CMatrix& m2);
friend CMatrix operator * (const double& num, const CMatrix& m1);
friend CMatrix operator * (const CMatrix& m1, const double& num);
friend CMatrix operator ~ (const CMatrix& m);//矩阵转置
CMatrix Inv();//矩阵求逆
void Unit();//生成单位矩阵
void Zero();//生成零矩阵
CString Look();//矩阵元素查看
};
CErrorElipseDrow:
误差椭圆绘制类
#pragma once
//控制网和误差椭圆绘制
class CErrorElipseDrow
{
private:
double dOrgX, dOrgY;//误差椭圆中心位置,即控制点平面坐标
double dScale;//绘图比例
public:
void SETORG(double X, double Y);
void SETScale(double scale);
void Draw(CDC* pDC, CRect& rect,double dAlfa,double dE,double dF);//dAlfa为长半轴方位角、dE为短半径,dF为长半径
};
ControlNet:
程序数据处理类,核心
#pragma once
#include "CTRLPOINT.h"
#include"Matrix.h"
//程序功能主要实现类
class ControlNet
{
public:
ControlNet();
~ControlNet();
private:
int kpt_num;//已知点个数
CCTRLPOINT* KPT;//已知点数组
int ukpt_num;//已知点个数
CCTRLPOINT* UKPT;//已知点数组
int obsDirect_count;//方向观测数
CObsDirection* OBSDIRECT;//方向观测数组
int obsDist_count;//距离观测数
CObsDist* OBSDIST;//距离观测数组
int station_num;//测站数
STATION *STA;//观测站
CMatrix B;//系数矩阵
CMatrix X;//未知数矩阵
CMatrix P;//权矩阵
CMatrix L;//常数项矩阵
CMatrix Nbb;//法方程矩阵
CMatrix Qxx;//协因数矩阵
CMatrix V;//观测值改正数矩阵
CMatrix QF;//观测值协因数矩阵
double m0;//单位权中误差
public:int times;//迭代次数
public:
bool LOADFILE(CString FileName,CString&strIn);//文件导入函数
void Adjust();//平差计算函数
void Estimate();//精度评定
int SPILTSTRINF(const CString strLine, char split, CStringArray& strArray);//字符串分割函数
void MainDraw(CDC* pDC, CRect& rect);//主绘图函数
void OutPut(CString& result);//结果输出函数
private:
bool SETKPT(int size);//给已知点数赋值并开辟存储空间
bool SETUNKPT(int size);//给未知点数赋值并开辟存储空间
bool SETDIRECT(int size);//给方向观测数赋值并开辟存储空间
bool SETDIST(int size);//给距离观测赋值并开辟存储空间
CCTRLPOINT* SearchPointUsingStrID(CString&strID);//按点编号查找点
int SearchUKPosUsingID(CString ID);//按点编号查找未知数点号
int SearchSTPosUsingID(CString ID);//按点编号查找测站点序号
double AzimuthCal(const double x1, const double y1, const double x2, const double y2);//坐标方位角计算
double DistCal(const double x1, const double y1, const double x2, const double y2);//距离计算函数
void MAX_(double& minx, double& miny, double& maxx, double& maxy);//计算绘图区范围(经测试可用)
void DrawFrame(CDC* pDC, CRect& rect,double &orgx,double &orgy,double &scalex,double&scaley);//框架绘制函数
void checkspace();//当程序再次运行时进行空间检查,避免出现内存未释放的情况
void RoughCal();//坐标概算函数
};
CPP文件:
CAngle.cpp
#include "pch.h"
#include "CAngle.h"
#include "math.h"
const double EPSILON = 1.0E-12;
const double PI = 4.0 * atan(1.0);
//重载构造函数,有缺省值
CAngle::CAngle(double value, AngleStyle style)
{
dValue = value;
nCurStyle = style;
}
CAngle::~CAngle(void)
{
}
//重载()函数
double& CAngle::operator() (AngleStyle style) //指定的类型获取角度值
{
//double dAngleValue;
if (style == DMS)
{
if (nCurStyle == DEG)
{
dValue = Dms(dValue);
}
else if (nCurStyle == RAD)
{
dValue = Dms(dValue * 180.0 / PI);
}
nCurStyle = DMS;
}
else if (style == DEG)
{
if (nCurStyle == DMS)
{
dValue = Deg(dValue);
}
else if (nCurStyle == RAD)
{
dValue = dValue * 180.0 / PI;
}
nCurStyle = DEG;
}
else
{
if (nCurStyle == DMS)
{
dValue = Deg(dValue) * PI / 180;
}
else if (nCurStyle == DEG)
{
dValue = dValue * PI / 180;
}
nCurStyle = RAD;
}
return dValue;
}
//重载()函数,该函数是常函数,只能被常CAngle对象使用
double CAngle::operator() (AngleStyle style) const //指定的类型获取角度值
{
double dAngleValue;
if (style == DMS)
{
if (nCurStyle == DEG)
{
dAngleValue = Dms(dValue);
}
else if (nCurStyle == RAD)
{
dAngleValue = Dms(dValue * 180.0 / PI);
}
else
{
dAngleValue = dValue;
}
}
else if (style == DEG)
{
if (nCurStyle == DMS)
{
dAngleValue = Deg(dValue);
}
else if (nCurStyle == RAD)
{
dAngleValue = dValue * 180.0 / PI;
}
else
{
dAngleValue = dValue;
}
}
else
{
if (nCurStyle == DMS)
{
dAngleValue = Deg(dValue) * PI / 180;
}
else if (nCurStyle == DEG)
{
dAngleValue = dValue * PI / 180;
}
else
{
dAngleValue = dValue;
}
}
return dAngleValue;
}
//私有成员,度分秒向十进制度转换
double CAngle::Deg(double dDms) const
{
int iDeg, iMin;
double dSec;
iDeg = int(dDms + EPSILON);//度//加一个很小的数,以防止取整时的出错
iMin = int((dDms - iDeg) * 100 + EPSILON);//分
dSec = ((dDms - iDeg) * 100 - iMin) * 100;//秒
return iDeg + (double)iMin / 60 + dSec / 3600;
}
//私有成员,十进制度向度分秒转换
double CAngle::Dms(double dDeg) const
{
int iDeg, iMin;
double dSec;
double dTmp;
iDeg = int(dDeg + EPSILON);//整数部分度
dTmp = (dDeg - iDeg) * 60;//小数部分转换成分
iMin = int(dTmp + EPSILON);//取分的整数部分
dSec = (dTmp - iMin) * 60;//截取秒
return iDeg + (double)iMin / 100 + dSec / 10000;
}
//友元重载+函数
CAngle operator + (const CAngle& m1, const CAngle& m2)
{
CAngle addAngle(0, RAD);
addAngle(RAD) = m1(RAD) + m2(RAD);
return addAngle;
}
//友元重载-函数
CAngle operator - (const CAngle& m1, const CAngle& m2)
{
CAngle subAngle(0, RAD);
subAngle(RAD) = m1(RAD) - m2(RAD);
return subAngle;
}CMatrix.cpp
#include "pch.h"
#include "Matrix.h"
#include "math.h"
CMatrix::CMatrix(int row, int col)
{
iRow = row;
iCol = col;
dMatData = new double* [row];
for (int i = 0; i < row; i++)
{
dMatData[i] = new double[col];
for (int j = 0; j < col; j++)
{
dMatData[i][j] = 0;
}
}
}
// copy constructor,
//拷贝构造函数的作用:
//(1)以类对象作为函数参数传值调用时;
//(2)函数返回值为类对象;
//(3)用一个已定义的对象去初始化一个新对象时;
CMatrix::CMatrix(const CMatrix& m)
{
iRow = m.Row();
iCol = m.Col();
dMatData = new double* [iRow];
for (int i = 0; i < iRow; i++)
{
dMatData[i] = new double[iCol];
// for(int j=0;j= iRow || col >= iCol)
{
throw("CMatrix::operator(): Index out of range!");
}
return dMatData[row][col];
}
返回数组元素(重载)
double CMatrix::operator () (int row, int col) const
{
if (row >= iRow || col >= iCol)
{
throw("CMatrix::operator(): Index out of range!");
}
return dMatData[row][col];
}
//重载预算符+
CMatrix operator + (const CMatrix& m1, const CMatrix& m2)
{
if ((m1.Col() != m2.Col()) || (m1.Row() != m2.Row()))
{
throw("CMatrix::operator+: The two matrix have different size!");
}
CMatrix matTmp(m1.Row(), m1.Col());
for (int i = 0; i < m1.Row(); i++)
{
for (int j = 0; j < m1.Col(); j++)
{
matTmp(i, j) = m1(i, j) + m2(i, j);
}
}
return matTmp;
}
//重载赋值运算符=,当左右两边矩阵的大小不相等时,
//以右边的大小为基准,调整左边矩阵的大小
CMatrix& CMatrix::operator = (const CMatrix& m)
{
//revised in 2011-4-1, by Daiwujiao
// if(iRow!=m.Row()||iCol!=m.Col())
//{
// throw( "CMatrix::operator=: The two matrix have different size!");
//}
if (iRow != m.Row() || iCol != m.Col())
{
SetSize(m.Row(), m.Col());
}
for (int i = 0; i < iRow; i++)
{
for (int j = 0; j < iCol; j++)
{
dMatData[i][j] = m(i, j);
}
}
return *this;
}
//调整矩阵大小,原有值不变
void CMatrix::SetSize(int row, int col)
{
if (row == iRow && col == iCol)
{
return;
}
double** rsData = new double* [row];
for (int i = 0; i < row; i++)
{
rsData[i] = new double[col];
for (int j = 0; j < col; j++)
{
rsData[i][j] = 0;
}
}
int minRow = (iRow > row) ? row : iRow;
int minCol = (iCol > col) ? col : iCol;
int colSize = minCol * sizeof(double);
for (int i = 0; i < minRow; i++)
{
memcpy(rsData[i], dMatData[i], colSize);
}
for (int i = 0; i < minRow; i++)
{
delete[] dMatData[i];
}
delete[] dMatData;
dMatData = rsData;
iRow = row;
iCol = col;
return;
}
void CMatrix::ReSize(int row, int col)
{
for (int i = 0; i < iRow; i++)
{
delete[] dMatData[i];
}
delete[] dMatData;
double** rsData = new double* [row];
for (int i = 0; i < row; i++)
{
rsData[i] = new double[col];
for (int j = 0; j < col; j++)
{
rsData[i][j] = 0;
}
}
dMatData = rsData;
iRow = row;
iCol = col;
return;
}
//重载预算符-
CMatrix operator - (const CMatrix& m1, const CMatrix& m2)
{
if ((m1.Col() != m2.Col()) || (m1.Row() != m2.Row()))
{
throw("CMatrix::operator-: The two matrix have different size!");
}
CMatrix matTmp(m1.Row(), m1.Col());
for (int i = 0; i < m1.Row(); i++)
{
for (int j = 0; j < m1.Col(); j++)
{
matTmp(i, j) = m1(i, j) - m2(i, j);
}
}
return matTmp;
}
//重载预算符*,两个矩阵相乘,m1的列要等于m2的行
CMatrix operator * (const CMatrix& m1, const CMatrix& m2)
{
if ((m1.Col() != m2.Row()))
{
throw("CMatrix::operator*: The col of matrix m1 doesn't equ to row of m2 !");
}
CMatrix matTmp(m1.Row(), m2.Col());
for (int i = 0; i < m1.Row(); i++)
{
for (int j = 0; j < m2.Col(); j++)
{
for (int k = 0; k < m2.Row(); k++)
{
matTmp(i, j) += m1(i, k) * m2(k, j);
}
}
}
return matTmp;
}
//重载预算符*,矩阵右乘一个数
CMatrix operator * (const CMatrix& m1, const double& num)
{
CMatrix matTmp(m1.Row(), m1.Col());
for (int i = 0; i < m1.Row(); i++)
{
for (int j = 0; j < m1.Col(); j++)
{
matTmp(i, j) = m1(i, j) * num;
}
}
return matTmp;
}
//重载预算符*,矩阵左乘一个数
CMatrix operator * (const double& num, const CMatrix& m1)
{
CMatrix matTmp(m1.Row(), m1.Col());
for (int i = 0; i < m1.Row(); i++)
{
for (int j = 0; j < m1.Col(); j++)
{
matTmp(i, j) = m1(i, j) * num;
}
}
return matTmp;
}
//矩阵转置
CMatrix operator ~ (const CMatrix& m)
{
CMatrix matTmp(m.Col(), m.Row());
for (int i = 0; i < m.Row(); i++)
for (int j = 0; j < m.Col(); j++)
{
matTmp(j, i) = m(i, j);
}
return matTmp;
}
//矩阵求逆
//采用选全主元法
CMatrix CMatrix::Inv()
{
if (iRow != iCol)
{
throw("待求逆的矩阵行列不相等!");
}
int i, j, k, vv;
CMatrix InvMat(iRow, iRow);
//复制矩阵
InvMat = *this;
int* MainRow = new int[iRow];
int* MainCol = new int[iRow];//用于记录主元素的行和列
double dMainCell;//主元元素的值
double dTemp;//临时变量
for (k = 0; k < iRow; k++)
{
dMainCell = 0;
//选全主元
for (i = k; i < iRow; i++)
{
for (j = k; j < iRow; j++)
{
dTemp = fabs(InvMat(i, j));
if (dTemp > dMainCell)
{
dMainCell = dTemp;
MainRow[k] = i;
MainCol[k] = j;
}
}
}
if (fabs(dMainCell) < 0.0000000000001)//矩阵秩亏,不能求逆
{
throw("矩阵秩亏");
}
if (MainRow[k] != k)//交换行
{
for (j = 0; j < iRow; j++)
{
vv = MainRow[k];
dTemp = InvMat(k, j);
InvMat(k, j) = InvMat(vv, j);
InvMat(vv, j) = dTemp;
}
}
if (MainCol[k] != k)//交换列
{
for (i = 0; i < iRow; i++)
{
vv = MainCol[k];
dTemp = InvMat(i, k);
InvMat(i, k) = InvMat(i, vv);
InvMat(i, vv) = dTemp;
}
}
InvMat(k, k) = 1.0 / InvMat(k, k);//计算乘数
for (j = 0; j < iRow; j++) //计算主行
{
if (j != k)
{
InvMat(k, j) = InvMat(k, j) * InvMat(k, k);
}
}
for (i = 0; i < iRow; i++)//消元
{
if (i != k)
{
for (j = 0; j < iRow; j++)
{
if (j != k)
{
InvMat(i, j) -= InvMat(i, k) * InvMat(k, j);
}
}
}
}
for (i = 0; i < iRow; i++)//计算主列
{
if (i != k)
{
InvMat(i, k) = -InvMat(i, k) * InvMat(k, k);
}
}
}
for (k = iRow - 1; k >= 0; k--)
{
if (MainCol[k] != k)// 交换行
{
for (j = 0; j < iRow; j++)
{
vv = MainCol[k];
dTemp = InvMat(k, j);
InvMat(k, j) = InvMat(vv, j);
InvMat(vv, j) = dTemp;
}
}
if (MainRow[k] != k)//交换列
{
for (i = 0; i < iRow; i++)
{
vv = MainRow[k];
dTemp = InvMat(i, k);
InvMat(i, k) = InvMat(i, vv);
InvMat(i, vv) = dTemp;
}
}
}
delete[] MainRow;
delete[] MainCol;
return InvMat;
}
//单位化矩阵
void CMatrix::Unit()
{
for (int i = 0; i < iRow; i++)
{
for (int j = 0; j < iCol; j++)
{
dMatData[i][j] = (i == j) ? 1 : 0;
}
}
}
void CMatrix::Zero()
{
for (int i = 0; i < iRow; i++)
{
for (int j = 0; j < iCol; j++)
{
dMatData[i][j] = 0;
}
}
}
CString CMatrix::Look()
{
CString result, temp;
result.Empty();
for (int i = 0; i < iRow; i++)
{
for (int j = 0; j < iCol; j++)
{
temp.Empty();
temp.Format(_T("%.4f\t"), dMatData[i][j]);
result += temp;
if (j == iCol - 1)
result += "\r\n";
}
}
return result;
}
CErrorElipseDrow.cpp
#include "pch.h"
#include "CErrorElipseDrow.h"
const double PI = 3.1415926535;
//设置椭圆中心坐标
void CErrorElipseDrow::SETORG(double X, double Y)
{
dOrgX = X;
dOrgY = Y;
}
//设置椭圆绘图比例
void CErrorElipseDrow::SETScale(double scale)
{
dScale = scale;
}
void CErrorElipseDrow::Draw(CDC* pDC, CRect& rect, double dAlfa, double dE, double dF)
{
double dStartX, dStartY, dEndX, dEndY;
//绘制短半轴
dAlfa += PI / 2;
dStartX = (dF * sin(dAlfa)) * dScale + dOrgX;
dStartY = (-dF * cos(dAlfa)) * dScale + dOrgY;
dEndX = (-dF * sin(dAlfa)) * dScale + dOrgX;
dEndY = (dF * cos(dAlfa)) * dScale + dOrgY;
CPen pen(PS_SOLID, 0, RGB(215, 0, 64));
CPen* pOldPen = pDC->SelectObject(&pen);
pDC->MoveTo(dStartX, dStartY);
pDC->LineTo(dEndX, dEndY);
//绘制长半轴
dStartX = (-dE * cos(dAlfa)) * dScale + dOrgX;
dStartY = (-dE * sin(dAlfa)) * dScale + dOrgY;
dEndX = (dE * cos(dAlfa)) * dScale + dOrgX;
dEndY = (dE * sin(dAlfa)) * dScale + dOrgY;
pDC->MoveTo(dStartX, dStartY);
pDC->LineTo(dEndX, dEndY);
double ex, fy;
ex = dE;
fy = 0;
//转换到长半轴方向上
dStartX = (ex * cos(dAlfa)- fy * sin(dAlfa))* dScale + dOrgX;
dStartY = (fy * cos(dAlfa)+ ex * sin(dAlfa)) * dScale + dOrgY;
pDC->MoveTo(dStartX, dStartY);
for (int i = 30; i <= 360; i += 30)
{
//在坐标轴方向的坐标
ex = dE * cos((i / 180.0) * PI);
fy = dF * sin((i / 180.0) * PI);
//转换到长半轴方向上
dEndX = (ex * cos(dAlfa)- fy * sin(dAlfa)) * dScale + dOrgX;
dEndY = (fy * cos(dAlfa)+ ex * sin(dAlfa)) * dScale + dOrgY;
pDC->LineTo(dEndX, dEndY);
}
pDC->SelectObject(pOldPen);
pen.DeleteObject();
}
ControlNet.cpp
控制网平差主要实现类,代码很多,结合头文件来看,理解每个函数的作用
#include "pch.h"
#include "ControlNet.h"
#include"Angle.h"
const double Ro = 206264.806247;
const double EPSION = 1E-5;
const double PI = acos(-1);
ControlNet::ControlNet()
{
kpt_num = ukpt_num = obsDirect_count = obsDist_count = station_num = times=0;
m0 = 0;
KPT = NULL;
UKPT = NULL;
OBSDIRECT = NULL;
OBSDIST = NULL;
STA = NULL;
}
ControlNet::~ControlNet()
{
if (KPT != NULL)
{
delete[]KPT;
KPT = NULL;
}
if (UKPT != NULL)
{
delete[]UKPT;
UKPT = NULL;
}
if (OBSDIRECT != NULL)
{
delete[]OBSDIRECT;
OBSDIRECT = NULL;
}
if (OBSDIST != NULL)
{
delete[]OBSDIST;
OBSDIST = NULL;
}
}
bool ControlNet::SETKPT(int size)
{
kpt_num = size;
KPT = new CCTRLPOINT[kpt_num];
return true;
}
bool ControlNet::SETUNKPT(int size)
{
ukpt_num = size;
UKPT = new CCTRLPOINT[ukpt_num];
return true;
}
bool ControlNet::SETDIRECT(int size)
{
obsDirect_count = size;
OBSDIRECT = new CObsDirection[obsDirect_count];
return true;
}
bool ControlNet::SETDIST(int size)
{
obsDist_count = size;
OBSDIST = new CObsDist[obsDist_count];
return true;
}
//文件读取
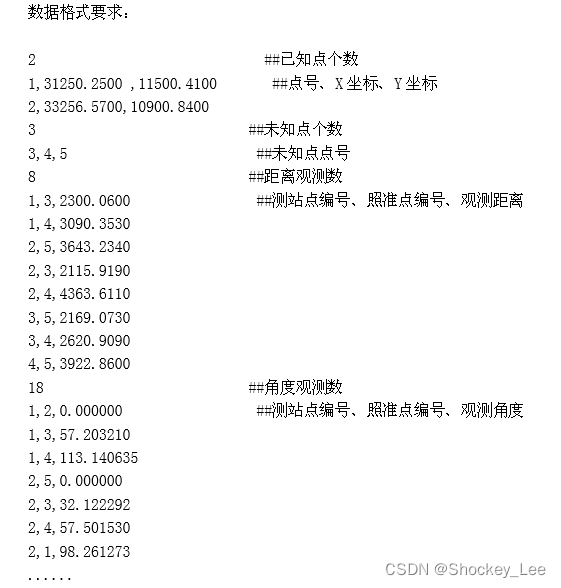
bool ControlNet::LOADFILE(CString FileName, CString& strIn)
{
CStdioFile sf;
if (!sf.Open(FileName, CFile::modeRead))
return false;
checkspace();//再次运行程序时由于析构函数还未调用,所以需要释放内存空间,读入文件后重新开辟
//读取已知点数据
CString strLine;
bool beof = sf.ReadString(strLine);
strIn += strLine;
strIn += "\r\n";
//
CString abc = _T("ABC2");
int a = _ttoi(abc);//对于非数字,利用_ttoi会变为0
//
//数据格式检验
if (_ttoi(strLine) == 0)
{
return false;
}
else
{
SETKPT(_ttoi(strLine));
for (int i = 0; i < kpt_num; i++)
{
beof = sf.ReadString(strLine);
strIn += strLine;
strIn += "\r\n";
CStringArray TEMP;
int n = SPILTSTRINF(strLine, ',', TEMP);
KPT[i].strID = TEMP[0];
KPT[i].X = _ttof(TEMP[1]);
KPT[i].Y = _ttof(TEMP[2]);
KPT[i].tag = TRUE;
KPT[i].type = TRUE;
}
}
//读取未知点数据
beof = sf.ReadString(strLine);
strIn += strLine;
strIn += "\r\n";
if (_ttoi(strLine) == 0)
{
return false;
}
else
{
SETUNKPT(_ttoi(strLine));
beof = sf.ReadString(strLine);
strIn += strLine;
strIn += "\r\n";
CStringArray TEMP;
int n = SPILTSTRINF(strLine, ',', TEMP);
for (int i = 0; i < ukpt_num; i++)
{
UKPT[i].strID = TEMP[i];
UKPT[i].tag = FALSE;
UKPT[i].type = FALSE;
}
}
//读取距离观测数据
beof = sf.ReadString(strLine);
if (_ttoi(strLine) == 0)
{
return false;
}
else
{
SETDIST(_ttoi(strLine));
for (int i = 0; i < obsDist_count; i++)
{
beof = sf.ReadString(strLine);
strIn += strLine;
strIn += "\r\n";
CStringArray TEMP;
int n = SPILTSTRINF(strLine, ',', TEMP);
OBSDIST[i].cpBG = SearchPointUsingStrID(TEMP[0]);
OBSDIST[i].cpEND = SearchPointUsingStrID(TEMP[1]);
OBSDIST[i].Dist = _ttof(TEMP[2]);
}
}
//读取方位角观测数据
beof = sf.ReadString(strLine);
strIn += strLine;
strIn += "\r\n";
if (_ttoi(strLine) == 0)
{
return false;
}
else
{
SETDIRECT(_ttoi(strLine));
station_num = 0;
for (int i = 0; i < obsDirect_count; i++)
{
beof = sf.ReadString(strLine);
strIn += strLine;
strIn += "\r\n";
CStringArray TEMP;
int n = SPILTSTRINF(strLine, ',', TEMP);
OBSDIRECT[i].cpST = SearchPointUsingStrID(TEMP[0]);
OBSDIRECT[i].cpOB = SearchPointUsingStrID(TEMP[1]);
OBSDIRECT[i].ObsAngle(DMS) = _ttof(TEMP[2]);
if (OBSDIRECT[i].ObsAngle(RAD) == 0)
station_num++;
}
}
sf.Close();
return true;
}
//字符串分割
int ControlNet::SPILTSTRINF(const CString strLine, char split, CStringArray& strArray)
{
strArray.RemoveAll();//自带清空属性
CString temp = strLine;
int tag = 0;
while (1)
{
tag = temp.Find(split);
if (tag >= 0)
{
strArray.Add(temp.Left(tag));
temp = temp.Right(temp.GetLength() - tag - 1);
}
else { break; }
}
strArray.Add(temp);
return strArray.GetSize();
}
//按点编号查找点
CCTRLPOINT* ControlNet::SearchPointUsingStrID(CString& strID)
{
for (int i = 0; i < kpt_num; i++)
{
if (strID == KPT[i].strID)
{
return &KPT[i];
}
}
for (int i = 0; i < ukpt_num; i++)
{
if (strID == UKPT[i].strID)
{
return &UKPT[i];
}
}
return NULL;
}
//按编号查找点的序号
int ControlNet::SearchUKPosUsingID(CString ID)
{
for (int i = 0; i < ukpt_num; i++)
{
if (UKPT[i].strID == ID)
return i;
}
return -1;
}
int ControlNet::SearchSTPosUsingID(CString ID)
{
for (int i = 0; i < station_num; i++)
{
if (STA[i].station->strID == ID)
return i;
}
return -1;
}
//方位角计算函数
double ControlNet::AzimuthCal(const double x1, const double y1, const double x2, const double y2)
{
double dx, dy;
dx = x2 - x1;
dy = y2 - y1 + EPSION;
if (dy >= 0)
return PI - PI / 2 - atan(dx / dy);
else
return PI + PI / 2 - atan(dx / dy);
}
//距离计算函数
double ControlNet::DistCal(const double x1, const double y1, const double x2, const double y2)
{
return sqrt((x1 - x2) * (x1 - x2) + (y1 - y2) * (y1 - y2));
}
//控制网区域范围
void ControlNet::MAX_(double& minx, double& miny, double& maxx, double& maxy)
{
minx = maxx = KPT[0].X;
miny = miny = KPT[0].Y;
for (int i = 0; i < ukpt_num + kpt_num; i++)
{
if (i < ukpt_num)
{
if (minx > UKPT[i].X)
minx = UKPT[i].X;
if (miny > UKPT[i].Y)
miny = UKPT[i].Y;
if (maxx < UKPT[i].X)
maxx = UKPT[i].X;
if (maxy < UKPT[i].Y)
maxy = UKPT[i].Y;
}
else
{
if (minx > KPT[i-ukpt_num].X)
minx = KPT[i - ukpt_num].X;
if (miny > KPT[i - ukpt_num].Y)
miny = KPT[i - ukpt_num].Y;
if (maxx < KPT[i - ukpt_num].X)
maxx = KPT[i - ukpt_num].X;
if (maxy < KPT[i - ukpt_num].Y)
maxy = KPT[i - ukpt_num].Y;
}
}
}
//控制网框架绘制
void ControlNet::DrawFrame(CDC*pDC,CRect&rect, double& orgx, double& orgy, double& scalex,double&scaley)
{
double lowx, lowy, highx, highy;
MAX_(lowx, lowy, highx, highy);//求得测图区的范围
rect.DeflateRect(rect.Width()*0.1, rect.Height()*0.1);
int num = 5;
int dx = rect.Width() / (num);
int dy = rect.Height() / (num);
int tx = (highx - lowx) / num;
int ty = (highy - lowy) / num;
scalex = double(dy) / tx;//x方向的比例系数
scaley = double(dx) / ty;//y方向的比例系数
CRect grideRect(rect.left, rect.top, rect.left + dx * num, rect.top + dy * num);//调整矩形大小,以便于格网的绘制
orgx = grideRect.bottom;
orgy = grideRect.left;
CPen gridpen(PS_DASH, 0, RGB(0, 100, 200));//创建格网画笔
CPen* pOldPen = pDC->SelectObject(&gridpen);
//绘制垂直线
for (int i = 0; i <= num; i++)
{
pDC->MoveTo(grideRect.left + i * dx, grideRect.bottom);
pDC->LineTo(grideRect.left + i * dx, grideRect.top);
CString str;
str.Format(_T("%d"), int(lowy)+i*ty);
pDC->TextOutW(grideRect.left + i * dx-10, grideRect.bottom + 10, str);
if (i == 0)
{
pDC->MoveTo(grideRect.left, grideRect.top);
pDC->LineTo(grideRect.left, grideRect.top - 30);
pDC->MoveTo(grideRect.left-10, grideRect.top - 20);
pDC->LineTo(grideRect.left, grideRect.top - 30);
pDC->LineTo(grideRect.left + 10, grideRect.top - 20);
}
}
//绘制水平线
for (int i = 0; i <= num; i++)
{
pDC->MoveTo(grideRect.left, grideRect.top+i*dy);
pDC->LineTo(grideRect.right , grideRect.top + i * dy);
CString str;
str.Format(_T("%d"), int(lowx) + i * tx);
pDC->TextOutW(grideRect.left-60, grideRect.bottom-i*dy-5, str);
if (i == 0)
{
pDC->MoveTo(grideRect.right, grideRect.bottom);
pDC->LineTo(grideRect.right+30, grideRect.bottom);
pDC->MoveTo(grideRect.right+20, grideRect.bottom- 10);
pDC->LineTo(grideRect.right+30, grideRect.bottom);
pDC->LineTo(grideRect.right+20, grideRect.bottom+10);
}
}
//绘制比例尺
pDC->SelectObject(pOldPen);
pDC->MoveTo(grideRect.left + grideRect.Width() / 2, grideRect.bottom + 40);
pDC->LineTo(grideRect.left + grideRect.Width() / 2 + 30, grideRect.bottom + 40);
CString sca;
sca.Format(_T("1:%d"), tx / dx);
pDC->TextOutW(grideRect.left + grideRect.Width() / 2 + 40, grideRect.bottom + 30, sca);
pDC->TextOutW(grideRect.right+45, grideRect.bottom-5, _T("Y"));
pDC->TextOutW(grideRect.left-5, grideRect.top-45, _T("X"));
}
void ControlNet::checkspace()
{
if (UKPT != NULL)
{
delete[]UKPT;
UKPT = NULL;
}
if (KPT != NULL)
{
delete[]KPT;
KPT = NULL;
}
if (OBSDIRECT != NULL)
{
delete[]OBSDIRECT;
OBSDIRECT = NULL;
}
if (OBSDIST != NULL)
{
delete[]OBSDIST;
OBSDIST = NULL;
}
}
//绘图主函数,绘制控制网以及误差椭圆
void ControlNet::MainDraw(CDC* pDC, CRect& rect)
{
double scalex, scaley, orgx, orgy;
double minx, miny, maxx, maxy;
MAX_(minx, miny, maxx, maxy);//求得测图区的范围
DrawFrame(pDC, rect,orgx,orgy,scalex,scaley);
/*scalex = scalex * DScale;
scaley= scaley * DScale;*/
CBrush BTri;
BTri.CreateSolidBrush(RGB(0, 100, 100));
//绘制控制网
for (int i = 0; i < obsDirect_count; i++)
{
int drx1, dry1;
drx1 = int((OBSDIRECT[i].cpST->Y - miny) * scaley + orgy);
dry1 =int(- (OBSDIRECT[i].cpST->X - minx) * scalex + orgx);
int drx2, dry2;
drx2 =int( (OBSDIRECT[i].cpOB->Y - miny) * scaley + orgy);
dry2 =int( - (OBSDIRECT[i].cpOB->X - minx) * scalex + orgx);
if (OBSDIRECT[i].cpST->type == true && OBSDIRECT[i].cpOB->type == true)//两点均为已知点
{
pDC->MoveTo(drx1,dry1);
pDC->LineTo(drx2, dry2);
pDC->MoveTo(drx1+5, dry1+5);
pDC->LineTo(drx2+5, dry2+5);
//已知边绘制双线
//已知点绘制三角形
pDC->SelectObject(BTri);
CPoint P1[3],P2[3];
P1[0].SetPoint(drx1, dry1 - 10);
P1[1].SetPoint(drx1 + 10, dry1 + 10);
P1[2].SetPoint(drx1-10, dry1 + 10);
P2[0].SetPoint(drx2, dry2 - 10);
P2[1].SetPoint(drx2 + 10, dry2 + 10);
P2[2].SetPoint(drx2-10, dry2 + 10);
pDC->Polygon(P1,3);
pDC->Polygon(P2, 3);
BTri.DeleteObject();
}
else
{
pDC->MoveTo(drx1, dry1);
pDC->LineTo(drx2, dry2);
}
}
for (int i = 0; i < kpt_num; i++)
{
pDC->TextOutW((KPT[i].Y - miny) * scaley + orgy+15, -(KPT[i].X - minx) * scalex + orgx -15, KPT[i].strID);
}
//绘制误差椭圆
for (int i = 0; i < ukpt_num; i++)
{
UKPT[i].EDRAW.SETORG((UKPT[i].Y - miny) * scaley + orgy, -(UKPT[i].X - minx) * scalex + orgx);
UKPT[i].EDRAW.SETScale(30);
UKPT[i].EDRAW.Draw(pDC,rect,UKPT[i].dAlfa,UKPT[i].dE,UKPT[i].dF);
pDC->TextOutW((UKPT[i].Y - miny) * scaley + orgy+15, -(UKPT[i].X - minx) * scalex + orgx-15, UKPT[i].strID);
}
}
//结果可视化输出
void ControlNet::OutPut(CString& result)
{
CString AResult,DResult,PResult,temp;
AResult.Format(_T("------------------------方向观测成果------------------------\r\n"));
temp.Format(_T("测站\t照准\t方向值(dms)\t改正数(s)\t平差后值(dms)\t观测精度(″)\r\n"));
AResult += temp;
for (int i = 0; i < obsDirect_count; i++)
{
temp.Empty();
CAngle pg;
pg(RAD) = OBSDIRECT[i].ObsAngle(RAD) + V(i, 0) / Ro;
temp.Format(_T("%s\t%s\t%.6f\t%.2f\t%.6f\t%.2f\r\n"), OBSDIRECT[i].cpST->strID, OBSDIRECT[i].cpOB->strID, OBSDIRECT[i].ObsAngle(DMS), V(i, 0), pg(DMS),OBSDIRECT[i].m);
AResult += temp;
}
DResult.Format(_T("------------------------距离观测成果------------------------\r\n"));
temp.Format(_T("测站\t照准\t距离(m)\t改正数(m)\t平差后值(m)\t观测精度(cm)\r\n"));
DResult += temp;
for (int i = 0; i < obsDist_count; i++)
{
temp.Empty();
temp.Format(_T("%s\t%s\t%.4f\t%.4f\t%.4f\t%.2f\r\n"), OBSDIST[i].cpBG->strID, OBSDIST[i].cpEND->strID, OBSDIST[i].Dist, V(i + obsDirect_count, 0) / 100, OBSDIST[i].Dist + V(i + obsDirect_count, 0) / 100,OBSDIST[i].m);
DResult += temp;
}
PResult.Format(_T("------------------------控制点平差成果------------------------\r\n"));
temp.Format(_T("点名\tX(m)\tY(m)\t长轴(m)\t短轴(m)\t长轴方位(dms)\t点位中误差(m)\t备注\r\n"));
PResult += temp;
for (int i = 0; i < kpt_num; i++)
{
temp.Empty();
CAngle pq;
pq(RAD) = KPT[i].dAlfa;
temp.Format(_T("%s\t%.4f\t%.4f\t\t\t\t\t已知点\r\n"), KPT[i].strID, KPT[i].X, KPT[i].Y, pq(DMS));
PResult += temp;
}
for (int i = 0; i < ukpt_num; i++)
{
temp.Empty();
CAngle pq;
pq(RAD) = UKPT[i].dAlfa;
temp.Format(_T("%s\t%.4f\t%.4f\t%.4f\t%.4f\t%.6f\t%.4f\r\n"), UKPT[i].strID, UKPT[i].X, UKPT[i].Y, UKPT[i].dE / 100, UKPT[i].dF / 100, pq(DMS),UKPT[i].dP);
PResult += temp;
}
result.Format(_T("--------------------------平差成果--------------------------\r\n"));
temp.Empty();
temp.Format(_T("迭代次数:%d\r\n单位权中误差(″):%.4f\r\n"), times,m0);
result += temp + AResult + DResult + PResult;
}
//概算函数,逐点计算法,需要递归计算
void ControlNet::RoughCal()
{
for (int i = 0; i < ukpt_num; i++)
{
if (UKPT[i].tag == FALSE)//首先判断该点是否已经完成概算
{
for (int j = 0; j < obsDist_count; j++)
{
if (OBSDIST[j].cpEND->strID == UKPT[i].strID && OBSDIST[j].cpBG->tag == TRUE && UKPT[i].tag == FALSE)//寻找和该点有距离观测关系的已知点
{
for (int k = 0; k < obsDirect_count; k++)
{
if (OBSDIRECT[k].cpST == OBSDIST[j].cpBG && OBSDIRECT[k].cpOB->tag == TRUE)//寻找另一已知点
{
double T0 = AzimuthCal(OBSDIRECT[k].cpOB->X, OBSDIRECT[k].cpOB->Y, OBSDIRECT[k].cpST->X, OBSDIRECT[k].cpST->Y);//已知边的方位角
for (int l = 0; l < obsDirect_count; l++)
{
if (OBSDIRECT[l].cpST == OBSDIRECT[k].cpST && OBSDIRECT[l].cpOB->strID == UKPT[i].strID)//寻找观测角度
{
double A;
double T1 = OBSDIRECT[l].ObsAngle(RAD) - OBSDIRECT[k].ObsAngle(RAD);//两方向的夹角
if (T1 >= 0)
A = T1 + T0 - PI;
else
A = PI + T1 + T0;
UKPT[i].X = OBSDIST[j].cpBG->X + OBSDIST[j].Dist * cos(A);
UKPT[i].Y = OBSDIST[j].cpBG->Y + OBSDIST[j].Dist * sin(A);
UKPT[i].tag = TRUE;
break;
}
}
break;
}
}
}
}
}
}
for (int n = 0; n < ukpt_num; n++)
{
if (UKPT[n].tag == FALSE)
{
RoughCal();
}
}
}
//平差函数
void ControlNet::Adjust()
{
RoughCal();
//计算定向边的近似方位角
//概算检查
CString checkg,tempg;
for (int i = 0; i < kpt_num+ukpt_num; i++)
{
if (i < kpt_num)
{
tempg.Format(_T("%.6f\t%.6f\r\n"), KPT[i].X, KPT[i].Y);
checkg += tempg;
}
else
{
tempg.Format(_T("%.6f\t%.6f\r\n"), UKPT[i-kpt_num].X, UKPT[i-kpt_num].Y);
checkg += tempg;
}
}
STA = new STATION[station_num];//为测站开辟空间,未释放
B.ReSize(obsDirect_count + obsDist_count, 2 * ukpt_num + station_num);
X.ReSize(2 * ukpt_num + station_num, 1);
L.ReSize(obsDirect_count + obsDist_count, 1);
P.ReSize(obsDirect_count + obsDist_count, obsDirect_count + obsDist_count);
Nbb.ReSize(2 * ukpt_num + station_num, 2 * ukpt_num + station_num);
//定权
for (int i = 0; i < obsDirect_count + obsDist_count; i++)
{
if (i < obsDirect_count)
P(i, i) = 1;
else
P(i, i) = 1E5 / (OBSDIST[i - obsDirect_count].Dist);//!!!如何定权存疑,单位cm
}
//迭代次数
times = 0;
double max_ = 0.0;//限差判断变量
do
{
//构造B、L矩阵
max_ = 0;
int k = 0;
//计算测站定向边的方位角
for (int i = 0; i < obsDirect_count; i++)
{
if (OBSDIRECT[i].ObsAngle(RAD) == 0)
{
STA[k].station = OBSDIRECT[i].cpST;
STA[k].start = OBSDIRECT[i].cpOB;
STA[k].st_(RAD) = AzimuthCal(OBSDIRECT[i].cpST->X, OBSDIRECT[i].cpST->Y, OBSDIRECT[i].cpOB->X, OBSDIRECT[i].cpOB->Y);
k++;
}
}
//方向角观测误差方程
for (int i = 0; i < obsDirect_count; i++)
{
//需要修改,按照测站点计算方位角
double Tij = AzimuthCal(OBSDIRECT[i].cpST->X, OBSDIRECT[i].cpST->Y, OBSDIRECT[i].cpOB->X, OBSDIRECT[i].cpOB->Y);
double Dij = (DistCal(OBSDIRECT[i].cpOB->X, OBSDIRECT[i].cpOB->Y, OBSDIRECT[i].cpST->X, OBSDIRECT[i].cpST->Y));
int s = SearchSTPosUsingID(OBSDIRECT[i].cpST->strID);
if (OBSDIRECT[i].cpOB->type == FALSE && OBSDIRECT[i].cpST->type == FALSE)//如果两点均是未知点
{
int n = SearchUKPosUsingID(OBSDIRECT[i].cpOB->strID);
int m = SearchUKPosUsingID(OBSDIRECT[i].cpST->strID);
B(i, 2 * m) = Ro * sin(Tij) / (Dij * 100);//单位要统一,定权的单位分别是秒和厘米
B(i, 2 * m + 1) = -Ro * cos(Tij) / (Dij * 100);
B(i, 2 * n) = -Ro * sin(Tij) / (Dij * 100);
B(i, 2 * n + 1) = Ro * cos(Tij) / (Dij * 100);
B(i, 2 * ukpt_num + s) = -1;
}
else if (OBSDIRECT[i].cpOB->type == FALSE && OBSDIRECT[i].cpST->type == TRUE)//如果测站点为已知点
{
int n = SearchUKPosUsingID(OBSDIRECT[i].cpOB->strID);
B(i, 2 * n) = -Ro * sin(Tij) / (Dij * 100);
B(i, 2 * n + 1) = Ro * cos(Tij) / (Dij * 100);
B(i, 2 * ukpt_num + s) = -1;
}
else if (OBSDIRECT[i].cpOB->type == TRUE && OBSDIRECT[i].cpST->type == FALSE)
{
int m = SearchUKPosUsingID(OBSDIRECT[i].cpST->strID);
B(i, 2 * m) = Ro * sin(Tij) / (Dij * 100);
B(i, 2 * m + 1) = -Ro * cos(Tij) / (Dij * 100);
B(i, 2 * ukpt_num + s) = -1;
}
else
{
B(i, 2 * ukpt_num + s) = -1;
}
//L矩阵
double dA = -STA[s].st_(RAD) + Tij;
if (dA < 0)
{
L(i, 0) = -OBSDIRECT[i].ObsAngle(RAD) + 2 * PI + dA;
}
else if (dA > 0)
{
L(i, 0) = -OBSDIRECT[i].ObsAngle(RAD) + dA;
}
else
{
L(i, 0) = 0;
}
}
for (int i = 0; i < obsDirect_count; i++)
{
L(i, 0) = Ro * L(i, 0);//弧度转为秒
}
//边长观测误差方程
for (int i = 0; i < obsDist_count; i++)
{
double TT = AzimuthCal(OBSDIST[i].cpBG->X, OBSDIST[i].cpBG->Y, OBSDIST[i].cpEND->X, OBSDIST[i].cpEND->Y);
L(obsDirect_count + i, 0) = (DistCal(OBSDIST[i].cpBG->X, OBSDIST[i].cpBG->Y, OBSDIST[i].cpEND->X, OBSDIST[i].cpEND->Y) - OBSDIST[i].Dist) * 100;
if (OBSDIST[i].cpBG->type == FALSE && OBSDIST[i].cpEND->type == FALSE)//如果起始点和终点均为未知点
{
int n = SearchUKPosUsingID(OBSDIST[i].cpEND->strID);
int m = SearchUKPosUsingID(OBSDIST[i].cpBG->strID);
B(obsDirect_count + i, 2 * m) = -cos(TT);
B(obsDirect_count + i, 2 * m + 1) = -sin(TT);
B(obsDirect_count + i, 2 * n) = cos(TT);
B(obsDirect_count + i, 2 * n + 1) = sin(TT);
}
else if (OBSDIST[i].cpBG->type == TRUE && OBSDIST[i].cpEND->type == FALSE)
{
int n = SearchUKPosUsingID(OBSDIST[i].cpEND->strID);
B(obsDirect_count + i, 2 * n) = cos(TT);
B(obsDirect_count + i, 2 * n + 1) = sin(TT);
}
else if (OBSDIST[i].cpBG->type == FALSE && OBSDIST[i].cpEND->type == TRUE)
{
int m = SearchUKPosUsingID(OBSDIST[i].cpBG->strID);
B(obsDirect_count + i, 2 * m) = -cos(TT);
B(obsDirect_count + i, 2 * m + 1) = -sin(TT);
}
}
//解算法方程
Nbb = (~B * P * B);
X = Nbb.Inv() * ~B * P * (-1 * L);
for (int i = 0; i < ukpt_num; i++)
{
UKPT[i].X += X(2 * i, 0) / 100;//改正未知数
UKPT[i].Y += X(2 * i + 1, 0) / 100;
}
for (int i = 0; i < 2 * ukpt_num; i++)
{
if (max_ < fabs(X(i, 0)))
max_ = fabs(X(i, 0));
}
times++;
} while (max_ > 0.001);//当dX满足限差时结束迭代
delete[]STA;
STA = NULL;
}
//精度评定函数
void ControlNet::Estimate()
{
V.ReSize(obsDirect_count + obsDist_count, 1);
Qxx.ReSize(ukpt_num * 2 + station_num, ukpt_num * 2 + station_num);
V = B * X + L;
m0 = sqrt((~V * P * V)(0, 0) / (obsDirect_count + obsDist_count - ukpt_num * 2 - station_num));//单位权中误差
Qxx = Nbb.Inv();//协因数矩阵
//计算点位精度以及误差椭圆参数
for (int i = 0; i < ukpt_num; i++)
{
double mx = m0 * sqrt(Qxx(i * 2, i * 2));
double my = m0 * sqrt(Qxx(i * 2 + 1, i * 2 + 1));
UKPT[i].dP = m0 * sqrt(mx * mx + my * my);//点位误差
UKPT[i].dAlfa = 0.5 * atan(2 * Qxx(i * 2, i * 2 + 1) / (Qxx(i * 2, i * 2) - Qxx(i * 2 + 1, i * 2 + 1)));//误差椭圆元素赋值
UKPT[i].dE = m0 * sqrt(Qxx(i * 2, i * 2) + Qxx(i * 2, i * 2 + 1) * tan(UKPT[i].dAlfa));//长轴
UKPT[i].dF = m0 * sqrt(Qxx(i * 2, i * 2) + Qxx(i * 2, i * 2 + 1) * tan(UKPT[i].dAlfa + 0.5 * PI));//短轴
double temp;//所求的E,F均为极值,需要判断大小
if (UKPT[i].dF > UKPT[i].dE)
{
temp = UKPT[i].dE;
UKPT[i].dE = UKPT[i].dF;
UKPT[i].dF = temp;
UKPT[i].dAlfa += 0.5 * PI;
}
}
//计算观测精度
CMatrix fT;
fT.ReSize(obsDirect_count + obsDist_count, 2 * ukpt_num);//截取B矩阵
for (int i = 0; i < obsDirect_count + obsDist_count; i++)
{
for (int j = 0; j < 2 * ukpt_num; j++)
fT(i, j) = B(i, j);
}
CMatrix Qx;//矩阵维数不一致
Qx.ReSize(2 * ukpt_num, 2 * ukpt_num);
for (int i = 0; i < 2 * ukpt_num; i++)
{
for (int j = 0; j < 2 * ukpt_num; j++)
Qx(i, j) = Qxx(i, j);
}
QF.ReSize(obsDirect_count + obsDist_count, obsDirect_count + obsDist_count);
QF = fT * Qx * ~fT;
for (int i = 0; i < obsDirect_count + obsDist_count; i++)
{
if (i < obsDirect_count)
OBSDIRECT[i].m = m0 * sqrt(QF(i, i));//角度观测精度
else
OBSDIST[i - obsDirect_count].m = m0 * sqrt(QF(i, i));//距离观测精度
}
}
至此,导线网平差的主要代码就已经编写完毕了,然后就是界面设计了,由于对MFC较为熟练,所以我采用了基于MFC的模板,各位读者也可以使用基于单个文档来写。这一部分代码我就不展示了(这部分写的不太行(* /ω\*) )。
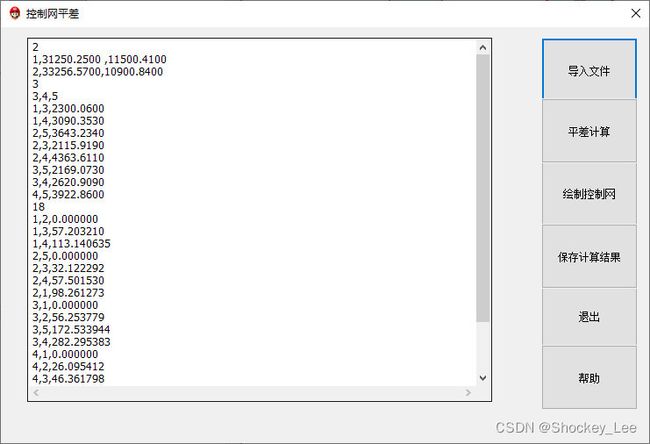
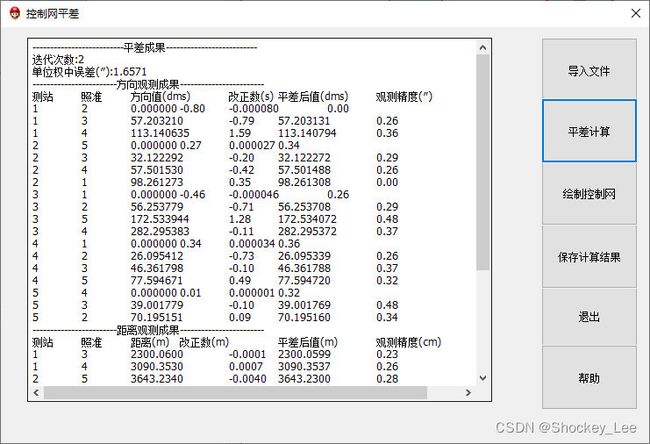
五、界面设计
界面设计依个人的喜好而设计,尽量要大气美观,对使用者友好。
以下是我设计的界面,比较简单,仅供参考(* /ω\*)


数据格式说明:
六、总结
概算和平差是本次实习的两大难点,概算的关键在于找到与其匹配的计算元(V型结构),一次算不完就进行递归,直至所有待定点解算出来为止;平差部分是整个程序的核心,这一部分需要理解平差原理,列立误差方程,从而得到B,P,L三个矩阵,再利用平差公式解算。
以下是我编写程序时所遇见的一些bug及解决办法:
1、坐标概算无法跳出循环或得不到正确的计算结果
检查方位角的角度类型,计算过程需要使用DMS形式;
是否在循环嵌套里面忘记了加上break,跳不出循环,导致重复计算;
完成概算后是否修改状态,设为已知。
2、平差部分迭代次数过大甚至跳不出循环
检查是否改化了未知数;
检查判断条件;
检查坐标概算;
检查单位是否统一,P矩阵是有量纲的,角度和距离单位需要全程保持一致(统一化成″和cm);
利用Look函数检查B、L矩阵的结构。
3、图像刷新问题
这里推荐http://t.csdn.cn/iWiPN,里面介绍了几种解决办法。
4、内存泄漏问题
内存泄漏问题主要就是通过new开辟的空间在程序运行完毕之后没有delete掉,解决办法就是去匹配new和delete。如果觉得利用new和delete动态开辟空间太复杂,可以用vector来给变量分配空间。vector的使用方法可以参考http://t.csdn.cn/EzBGV
因本人水平有限,所设计的程序还不够完善,如有不正之处,还请各位看官批评指正,多多指教。