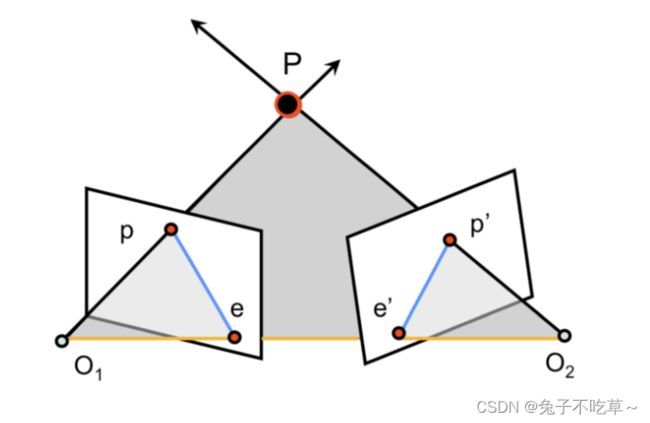
单目特征点对三角化
ORB-SLAM2之特征点对三角化
文章目录
- ORB-SLAM2之特征点对三角化
- 5 特征点对三角化
-
- 5.1 数学推导
- 5.2 代码分析
-
- 5.2.1 三角化
- 5.2.2 何处调用
- 5.3 三角化生成的地图点检验
-
- 5.3.1 理论分析
- 5.3.2 代码分析
5 特征点对三角化
5.1 数学推导
记P1,P2分别是第1、2帧对应的投影矩阵,它们将同一个空间点 X ( X , Y , Z ) X(X,Y,Z) X(X,Y,Z)投影到图像上,对应特征匹配对 x 1 、 x 2 x_1、x_2 x1、x2, λ \lambda λ表示系数,则上述过程可以表示如下:
x 1 = λ P 1 X x 2 = λ P 2 X \begin{gathered}\boldsymbol{x}_1=\lambda\boldsymbol{P}_1\boldsymbol{X}\\\boldsymbol{x}_2=\lambda\boldsymbol{P}_2\boldsymbol{X}\end{gathered} x1=λP1Xx2=λP2X
用矩阵来描述上面的公式(类似于直接线性变换DLT)
[ x y 1 ] = λ [ p 1 p 2 p 3 p 4 p 5 p 6 p 7 p 8 p 9 p 10 p 11 p 12 ] [ X Y Z 1 ] \begin{bmatrix}x\\y\\1\end{bmatrix}=\lambda\begin{bmatrix}p_1&p_2&p_3&p_4\\p_5&p_6&p_7&p_8\\p_9&p_{10}&p_{11}&p_{12}\end{bmatrix}\begin{bmatrix}X\\Y\\Z\\1\end{bmatrix} xy1 =λ p1p5p9p2p6p10p3p7p11p4p8p12 XYZ1
简计为:
[ x y 1 ] = λ [ − P 0 − − P 1 − − P 2 − ] [ X Y Z 1 ] \begin{bmatrix}x\\y\\1\end{bmatrix}=\lambda\begin{bmatrix}-&P_0&-\\-&P_1&-\\-&P_2&-\end{bmatrix}\begin{bmatrix}X\\Y\\Z\\1\end{bmatrix} xy1 =λ −−−P0P1P2−−− XYZ1
等式两边叉乘坐标
[ x y 1 ] × [ x y 1 ] = [ x y 1 ] × λ [ − P 0 − − P 1 − − P 2 − ] [ X Y Z 1 ] \begin{bmatrix}x\\y\\1\end{bmatrix}\times\begin{bmatrix}x\\y\\1\end{bmatrix}=\begin{bmatrix}x\\y\\1\end{bmatrix}\times\lambda\begin{bmatrix}-&P_0&-\\-&P_1&-\\-&P_2&-\end{bmatrix}\begin{bmatrix}X\\Y\\Z\\1\end{bmatrix} xy1 × xy1 = xy1 ×λ −−−P0P1P2−−− XYZ1
推导结果如下
[ x y 1 ] × [ − P 0 − − P 1 − − P 2 − ] [ X Y Z 1 ] = [ 0 0 0 ] \begin{bmatrix}x\\y\\1\end{bmatrix}\times\begin{bmatrix}-&P_0&-\\-&P_1&-\\-&P_2&-\end{bmatrix}\begin{bmatrix}X\\Y\\Z\\1\end{bmatrix}=\begin{bmatrix}0\\0\\0\end{bmatrix} xy1 × −−−P0P1P2−−− XYZ1 = 000
把叉积写为反对称矩阵
[ 0 − 1 y 1 0 − x − y x 0 ] [ − P 0 − − P 1 − − P 2 − ] [ X Y Z 1 ] = [ 0 0 0 ] \begin{bmatrix}0&-1&y\\1&0&-x\\-y&x&0\end{bmatrix}\begin{bmatrix}-&P_0&-\\-&P_1&-\\-&P_2&-\end{bmatrix}\begin{bmatrix}X\\Y\\Z\\1\end{bmatrix}=\begin{bmatrix}0\\0\\0\end{bmatrix} 01−y−10xy−x0 −−−P0P1P2−−− XYZ1 = 000
将前面两个矩阵乘出来,得到下面结果,注意下面第一个矩阵的第三行与前面两行线性相关,所以只保留线性无关的两行。也就是说,一个特征点可以提供两个约束等式
[ y P 2 − P 1 P 0 − x P 2 x P 1 − y P 0 ] [ X Y Z 1 ] = [ 0 0 0 ] \begin{bmatrix}yP_2-P_1\\P_0-xP_2\\xP_1-yP_0\end{bmatrix}\begin{bmatrix}X\\Y\\Z\\1\end{bmatrix}=\begin{bmatrix}0\\0\\0\end{bmatrix} yP2−P1P0−xP2xP1−yP0 XYZ1 = 000
我们用 p p p表示待求的三维点, P j i P^i_j Pji表示第 i i i个投影矩阵的第 j j j行,那么一对匹配点可以提供4个约束方程
[ y 1 P 2 1 − P 1 1 P 0 1 − x 1 P 2 1 y 2 P 2 2 − P 1 2 P 0 2 − x 2 P 2 2 ] p = [ 0 0 0 ] \begin{bmatrix}y_1P_2^1-P_1^1\\P_0^1-x_1P_2^1\\y_2P_2^2-P_1^2\\P_0^2-x_2P_2^2\end{bmatrix}\boldsymbol{p}=\begin{bmatrix}0\\\\0\\\\0\end{bmatrix} y1P21−P11P01−x1P21y2P22−P12P02−x2P22 p= 000
A p = 0 \begin{matrix}Ap=0\\\\\\\end{matrix} Ap=0
和前面的求解一样,利用SVD求解,右奇异矩阵的最后一列就是最终的解,即三角化得到的三维点坐标。
5.2 代码分析
5.2.1 三角化
/** 给定投影矩阵P1,P2和图像上的匹配特征点点kp1,kp2,从而计算三维点坐标
* @brief
*
* @param[in] kp1 特征点, in reference frame
* @param[in] kp2 特征点, in current frame
* @param[in] P1 投影矩阵P1
* @param[in] P2 投影矩阵P2
* @param[in & out] x3D 计算的三维点
*/
void Initializer::Triangulate(
const cv::KeyPoint &kp1, //特征点, in reference frame
const cv::KeyPoint &kp2, //特征点, in current frame
const cv::Mat &P1, //投影矩阵P1
const cv::Mat &P2, //投影矩阵P2
cv::Mat &x3D) //三维点
{
cv::Mat A(4,4,CV_32F);
//构造参数矩阵A
A.row(0) = kp1.pt.x*P1.row(2)-P1.row(0);
A.row(1) = kp1.pt.y*P1.row(2)-P1.row(1);
A.row(2) = kp2.pt.x*P2.row(2)-P2.row(0);
A.row(3) = kp2.pt.y*P2.row(2)-P2.row(1);
//奇异值分解的结果
cv::Mat u,w,vt;
//对系数矩阵A进行奇异值分解
cv::SVD::compute(A,w,u,vt,cv::SVD::MODIFY_A| cv::SVD::FULL_UV);
//根据前面的结论,奇异值分解右矩阵的最后一行其实就是解,原理类似于前面的求最小二乘解,四个未知数四个方程正好正定
// 用列向量来表示一个点的空间坐标
x3D = vt.row(3).t();
// 为了符合其次坐标的形式,使最后一维为1----归一化
x3D = x3D.rowRange(0,3)/x3D.at<float>(3);
}
5.2.2 何处调用
三角化的条件:已知匹配点对,投影矩阵,求解三维点。本质就是一个三维点在两幅图像上对应的像素点提供了4个方程约束。
一般来讲,第一帧会被选择作为世界系,所以P1本质就是内参矩阵K。P2实际上就是第一帧到第二帧的变换矩阵 K T 2 w KT_{2w} KT2w。

int Initializer::CheckRT(const cv::Mat &R, const cv::Mat &t, const vector<cv::KeyPoint> &vKeys1, const vector<cv::KeyPoint> &vKeys2,
const vector<Match> &vMatches12, vector<bool> &vbMatchesInliers,
const cv::Mat &K, vector<cv::Point3f> &vP3D, float th2, vector<bool> &vbGood, float ¶llax)
{
// 以第一个相机的光心作为世界坐标系, 定义相机的投影矩阵 相当于本身就是相机系坐标,只需要相机系到像素系
cv::Mat P1(3,4, //矩阵的大小是3x4
CV_32F, //数据类型是浮点数
cv::Scalar(0)); //初始的数值是0
// 将整个K矩阵拷贝到P1矩阵的左侧3x3矩阵,因为 K*I = K
K.copyTo(P1.rowRange(0,3).colRange(0,3));
cv::Mat P2(3,4,CV_32F);
R.copyTo(P2.rowRange(0,3).colRange(0,3)); // 复制R
t.copyTo(P2.rowRange(0,3).col(3));
P2 = K*P2;
Triangulate(kp1,kp2, //特征点
P1,P2, //投影矩阵
p3dC1); //输出,三角化测量之后特征点的空间坐标
}
5.3 三角化生成的地图点检验
5.3.1 理论分析
我们虽然通过三角化成功得到了三维点,但是这些三维点并不都是有效的,需要进行严格的筛查才能作为初始化地图点。
我们通过判断有效三维点的数目来判断当前位姿是否符合要求。为方便描述,我们把第1、2帧图像称为第1、2个相机。我们把相机1的光轴中心作为世界坐标系原点,从相机1到相机2的位姿记为
T 21 = [ R 21 t 21 O 1 ] T_{21}=\left[\begin{matrix}R_{21}&t_{21}\\\boldsymbol{O}&1\end{matrix}\right] T21=[R21Ot211]
对 T 21 T_{21} T21取逆:
T 12 = T 21 − 1 = [ R 21 ⊤ − R 21 ⊤ t 21 O 1 ] T_{12}=T_{21}^{-1}=\begin{bmatrix}\boldsymbol{R}_{21}^{\top}&-\boldsymbol{R}_{21}^{\top}\boldsymbol{t}_{21}\\\boldsymbol{O}&1\end{bmatrix} T12=T21−1=[R21⊤O−R21⊤t211]
得到
R 12 = R 12 ⊤ t 12 = − R 21 ⊤ t 21 \begin{aligned}R_{12}&=R_{12}^{\top}\\t_{12}&=-R_{21}^{\top}t_{21}\end{aligned} R12t12=R12⊤=−R21⊤t21
所以相机2的光轴中心 O 2 O_2 O2在相机1坐标系下的坐标为 t 12 = − R 21 ⊤ t 21 t_{12}=-R_{21}^{\top}t_{21} t12=−R21⊤t21
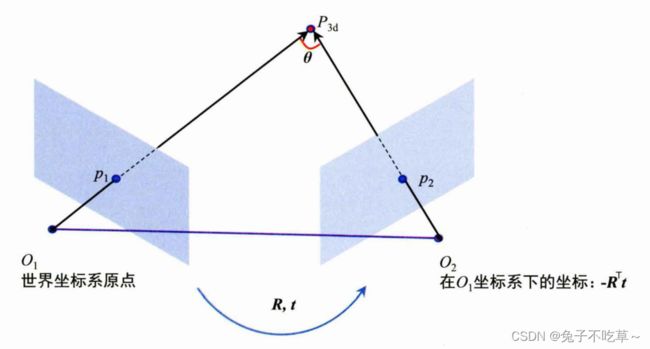
为了求解三维点分别在两个坐标系下和光轴中心的夹角(就是上面图里边的 θ \theta θ)。如果我们要求向量夹角,那么前提是这些向量都在同一个坐标系下。此时 O 1 O1 O1是相机1的光轴中心,也是相机1坐标系原点, P 3 d P_{3d} P3d是相机1坐标系(世界坐标系)下的三维点,这就必须得到 O 2 O2 O2在相机1坐标系下的坐标,也就是我们前面推导的过程。
还有一点就是,求出来的三维坐标是世界系下的坐标,也就是相机1坐标系下的坐标。
计算夹角是为了判断三维点的有效性,夹角越大,视差越大,三角化结果越准确。这里其实和双目相机很像,基线和焦距是确定的,视差大(左右匹配点横纵坐标之差),那么说明距离越近,深度值小,视差小,深度值大,那么对于单目三角化这种粗略的估计来说,可信度更低。

条件1:最优解成功三角化点数目明显大于次优解的点数目。
条件2:最优解的视差大于设定点阈值。
条件3:最优解成功三角化点数目大于设定的阈值。
条件4:最优解成功三角化点数目占所有特征点数目的90%以上。
5.3.2 代码分析
/**
* @brief 用位姿来对特征匹配点三角化,从中筛选中合格的三维点
*
* @param[in] R 旋转矩阵R
* @param[in] t 平移矩阵t
* @param[in] vKeys1 参考帧特征点
* @param[in] vKeys2 当前帧特征点
* @param[in] vMatches12 两帧特征点的匹配关系
* @param[in] vbMatchesInliers 特征点对内点标记
* @param[in] K 相机内参矩阵
* @param[in & out] vP3D 三角化测量之后的特征点的空间坐标
* @param[in] th2 重投影误差的阈值
* @param[in & out] vbGood 标记成功三角化点
* @param[in & out] parallax 计算出来的比较大的视差角(注意不是最大,具体看后面代码)
* @return int
*/
int Initializer::CheckRT(const cv::Mat &R, const cv::Mat &t, const vector<cv::KeyPoint> &vKeys1, const vector<cv::KeyPoint> &vKeys2,
const vector<Match> &vMatches12, vector<bool> &vbMatchesInliers,
const cv::Mat &K, vector<cv::Point3f> &vP3D, float th2, vector<bool> &vbGood, float ¶llax)
{
// 从相机内参数矩阵获取相机的校正参数
const float fx = K.at<float>(0,0);
const float fy = K.at<float>(1,1);
const float cx = K.at<float>(0,2);
const float cy = K.at<float>(1,2);
// 特征点是否是good点的标记,这里的特征点指的是参考帧中的特征点
vbGood = vector<bool>(vKeys1.size(),false);
//重设存储空间坐标的点的大小
vP3D.resize(vKeys1.size());
// 存储计算出来的每对特征点的视差
vector<float> vCosParallax;
vCosParallax.reserve(vKeys1.size());
// Camera 1 Projection Matrix K[I|0]
// Step 1:计算相机的投影矩阵
// 投影矩阵P是一个 3x4 的矩阵,可以将空间中的一个点投影到平面上,获得其平面坐标,这里均指的是齐次坐标。
// 对于第一个相机是 P1=K*[I|0]
// 以第一个相机的光心作为世界坐标系, 定义相机的投影矩阵 相当于本身就是相机系坐标,只需要相机系到像素系
cv::Mat P1(3,4, //矩阵的大小是3x4
CV_32F, //数据类型是浮点数
cv::Scalar(0)); //初始的数值是0
// 将整个K矩阵拷贝到P1矩阵的左侧3x3矩阵,因为 K*I = K
K.copyTo(P1.rowRange(0,3).colRange(0,3));
// 第一个相机的光心设置为世界坐标系下的原点
cv::Mat O1 = cv::Mat::zeros(3,1,CV_32F);
// Camera 2 Projection Matrix K[R|t]
// 计算第二个相机的投影矩阵 P2=K*[R|t]
cv::Mat P2(3,4,CV_32F);
R.copyTo(P2.rowRange(0,3).colRange(0,3)); // 复制R
t.copyTo(P2.rowRange(0,3).col(3));
// 最终结果是K*[R|t]
P2 = K*P2;
// 第二个相机的光心在世界坐标系下的坐标
cv::Mat O2 = -R.t()*t;
//在遍历开始前,先将good点计数设置为0
int nGood=0;
// 开始遍历所有的特征点对
for(size_t i=0, iend=vMatches12.size();i<iend;i++)
{
// 跳过outliers
if(!vbMatchesInliers[i])
continue;
// Step 2 获取特征点对,调用Triangulate() 函数进行三角化,得到三角化测量之后的3D点坐标
// kp1和kp2是匹配好的有效特征点
const cv::KeyPoint &kp1 = vKeys1[vMatches12[i].first];
const cv::KeyPoint &kp2 = vKeys2[vMatches12[i].second];
//存储三维点的的坐标
cv::Mat p3dC1;
// 利用三角法恢复三维点p3dC1
Triangulate(kp1,kp2, //特征点
P1,P2, //投影矩阵
p3dC1); //输出,三角化测量之后特征点的空间坐标
// Step 3 第一关:检查三角化的三维点坐标是否合法(非无穷值)
// 只要三角测量的结果中有一个是无穷大的就说明三角化失败,跳过对当前点的处理,进行下一对特征点的遍历
if(!isfinite(p3dC1.at<float>(0)) || !isfinite(p3dC1.at<float>(1)) || !isfinite(p3dC1.at<float>(2)))
{
// 其实这里就算是不这样写也没问题,因为默认的匹配点对就不是good点
vbGood[vMatches12[i].first]=false;
// 继续对下一对匹配点的处理
continue;
}
// Check parallax
// Step 4 第二关:通过三维点深度值正负、两相机光心视差角大小来检查是否合法
// 得到向量PO1
cv::Mat normal1 = p3dC1 - O1;
// 求取模长,其实就是距离
float dist1 = cv::norm(normal1);
//同理构造向量PO2
cv::Mat normal2 = p3dC1 - O2; // O2已经是相机1系下坐标
//求模长
float dist2 = cv::norm(normal2);
//根据公式:a.*b=|a||b|cos_theta 可以推导出来下面的式子
float cosParallax = normal1.dot(normal2)/(dist1*dist2);
// 如果深度值为负值,为非法三维点跳过该匹配点对
// 视差比较小时,重投影误差比较大。这里0.99998 对应的角度为0.36°,这里实际应该是 cosParallax>0.99998
if(p3dC1.at<float>(2)<=0 && cosParallax<0.99998)
continue;
// 讲空间点p3dC1变换到第2个相机坐标系下变为p3dC2
cv::Mat p3dC2 = R*p3dC1+t;
//判断过程和上面的相同
if(p3dC2.at<float>(2)<=0 && cosParallax<0.99998)
continue;
// Step 5 第三关:计算空间点在参考帧和当前帧上的重投影误差,如果大于阈值则舍弃
// 计算3D点在第一个图像上的投影误差
// 投影到参考帧图像上的点的坐标x,y
float im1x, im1y;
// 这个使能空间点的z坐标的倒数
float invZ1 = 1.0/p3dC1.at<float>(2);
// 投影到参考帧图像上。因为参考帧下的相机坐标系和世界坐标系重合,因此这里就直接进行投影就可以了
im1x = fx*p3dC1.at<float>(0)*invZ1+cx;
im1y = fy*p3dC1.at<float>(1)*invZ1+cy;
// 参考帧上的重投影误差,这个的确就是按照定义来的
float squareError1 = (im1x-kp1.pt.x)*(im1x-kp1.pt.x)+(im1y-kp1.pt.y)*(im1y-kp1.pt.y);
// 重投影误差太大,跳过淘汰
if(squareError1>th2)
continue;
// Check reprojection error in second image
// 计算3D点在第二个图像上的投影误差,计算过程和第一个图像类似
float im2x, im2y;
// 注意这里的p3dC2已经是第二个相机坐标系下的三维点了
float invZ2 = 1.0/p3dC2.at<float>(2);
im2x = fx*p3dC2.at<float>(0)*invZ2+cx;
im2y = fy*p3dC2.at<float>(1)*invZ2+cy;
// 计算重投影误差
float squareError2 = (im2x-kp2.pt.x)*(im2x-kp2.pt.x)+(im2y-kp2.pt.y)*(im2y-kp2.pt.y);
// 重投影误差太大,跳过淘汰
if(squareError2>th2)
continue;
// Step 6 统计经过检验的3D点个数,记录3D点视差角
// 如果运行到这里就说明当前遍历的这个特征点对靠谱,经过了重重检验,说明是一个合格的点,称之为good点
vCosParallax.push_back(cosParallax);
//存储这个三角化测量后的3D点在世界坐标系下的坐标
vP3D[vMatches12[i].first] = cv::Point3f(p3dC1.at<float>(0),p3dC1.at<float>(1),p3dC1.at<float>(2));
//good点计数++
nGood++;
if(cosParallax<0.99998)
vbGood[vMatches12[i].first]=true;
}
// Step 7 得到3D点中较小的视差角,并且转换成为角度制表示
if(nGood>0)
{
// 从小到大排序,注意vCosParallax值越大,视差越小
sort(vCosParallax.begin(),vCosParallax.end());
// !排序后并没有取最小的视差角,而是取一个较小的视差角
// 作者的做法:如果经过检验过后的有效3D点小于50个,那么就取最后那个最小的视差角(cos值最大)
// 如果大于50个,就取排名第50个的较小的视差角即可,为了避免3D点太多时出现太小的视差角
size_t idx = min(50,int(vCosParallax.size()-1));
//将这个选中的角弧度制转换为角度制
parallax = acos(vCosParallax[idx])*180/CV_PI;
}
else
//如果没有good点那么这个就直接设置为0了
parallax=0;
//返回good点计数
return nGood;
}