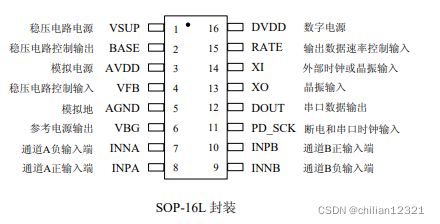
HX711称重传感器
https://atta.szlcsc.com/upload/public/pdf/source/20201105/C43656_14FD91CAE53E7DB415D03EABCB162D83.pdf
是一款专为高精度电子秤而设计的 24 位 A/D 转 换器芯片。
• 两路可选择差分输入
• 片内低噪声可编程放大器,可选增益为 32,64 和 128
• 片内稳压电路可直接向外部传感器和芯片内 A/D 转换器提供电源
• 片内时钟振荡器无需任何外接器件,必要时 也可使用外接晶振或时钟
• 上电自动复位电路 • 简单的数字控制和串口通讯:所有控制由管 脚输入,芯片内寄存器无需编程 • 可选择 10Hz 或 80Hz 的输出数据速率
• 同步抑制 50Hz 和 60Hz 的电源干扰
• 耗电量(含稳压电源电路): 典型工作电流:< 1.6mA, 断电电流:< 1A
• 工作电压范围:2.6 ~ 5.5V • 工作温度范围:-40 ~ +85℃
• 16 管脚的 SOP-16 封装

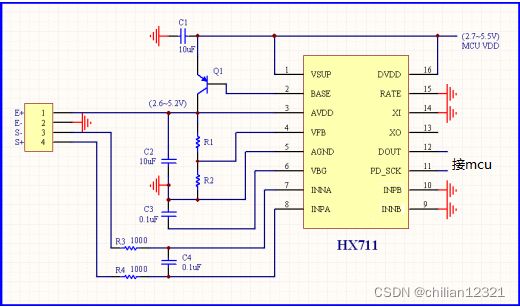
原理图:
//初始化HX711
long HX711_Buffer = 0;
long Weight_Maopi = 0,Weight_Shiwu = 0;
#define GapValue 430 //不同传感器值不同 需要标定
#define HIGH 1
#define LOW 0
#define HX711_GROUP GPIOB
#define HX711_DT GPIO_Pin_0
#define HX711_SCK GPIO_Pin_1
//****************************************************
//初始化HX711
//****************************************************
void Init_Hx711()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
//SCK
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitTypeDef GPIO_InitStructure1;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
//DOUT
GPIO_InitStructure1.GPIO_Pin = GPIO_Pin_1 ;
GPIO_InitStructure1.GPIO_Mode = GPIO_Mode_IN;
//GPIO_InitStructure1.GPIO_OType = GPIO_OType_OD;
GPIO_InitStructure1.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure1.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOB, &GPIO_InitStructure1);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
}
读取重量
//****************************************************
//读取HX711
//****************************************************
unsigned long HX711_Read(void) //增益128
{
unsigned long val = 0;
unsigned char i = 0;
//判断模块是否准备好
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1));
delay_us(1);
//sck 拉低
GPIO_ResetBits(GPIOB,GPIO_Pin_0);
//再次判断是否准备好
while(!GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1));
for(i=0;i<24;i++)
{
delay_us(100);
GPIO_SetBits(GPIOB,GPIO_Pin_0);
val=val<<1;
delay_us(1);
GPIO_ResetBits(GPIOB,GPIO_Pin_0);
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1))
val++;
delay_us(1);
}
GPIO_SetBits(GPIOB,GPIO_Pin_0);
val = val^0x800000;
delay_us(1);
GPIO_ResetBits(GPIOB,GPIO_Pin_0);
delay_us(1);
return val;
}
获取毛重需要放置在初始化里面,或者放置在按键中断里面 进行去皮。
//****************************************************
//获取毛皮重量
//****************************************************
void Get_Maopi()
{
Weight_Maopi = HX711_Read();
}
//****************************************************
//称重
//****************************************************
long Get_Weight()
{
HX711_Buffer = HX711_Read();
Weight_Shiwu = HX711_Buffer;
Weight_Shiwu = Weight_Shiwu - Weight_Maopi; //获取实物的AD采样数值。
Weight_Shiwu = (long)((float)Weight_Shiwu/GapValue);
return Weight_Shiwu;
}