《数字图像处理》第九章 形态学图像处理 学习笔记附部分例子代码(C++ & opencv)
形态学图像处理
-
- 0. 前言
- 1. 腐蚀和膨胀
-
- 1.1 腐蚀
- 1.2 膨胀
- 1.3 对偶性
- 2. 开操作和闭操作
- 3. 击中或不击中变换
- 4. 一些基本的形态学算法
-
- 4.1 边界提取
- 4.2 孔洞填充
- 5. 形态学重建
-
- 5.1 测地膨胀和腐蚀
- 6. 灰度级形态学
-
- 6.1 腐蚀和膨胀
- 6.2 一些基本算法
- 6.3 灰度级形态学重建
- 7. 小总结
0. 前言
参考博客:
opencv图像处理模块(6)——击中击不中 - 知乎 (zhihu.com)
第三版教材中图片下载地址: book images downloads
vs2019配置opencv可以查看:VS2019 & Opencv4.5.4配置教程
前情回顾:
数字图像处理第三章 灰度变换和空间滤波 学习笔记
数字图像处理第四章 频率域滤波 学习笔记
数字图像处理第五章 图像复原和重建(内容较简单,就没有详细记录笔记)
数字图像处理第六章 彩色图像处理
数字图像处理第七章 小波与多分辨率处理(内容困难,仅进行了简单记录)
数字图像处理第八章 图像压缩(目前非重点)
后续剧情:
数字图像处理第十章 图像分割 学习笔记
数字图像处理第11章 表示和描述 学习笔记
1. 腐蚀和膨胀
1.1 腐蚀
A ⊖ B = { z ∣ ( B ) z ∩ A c = ∅ } A\ominus B = \{z | (B)_{z} \cap A^{c} = \varnothing \} A⊖B={z∣(B)z∩Ac=∅}
B不与A的补集的交集为空
1.2 膨胀
A ⊕ B = { z ∣ ( B ^ ) z ∩ A ≠ ∅ } A\oplus B=\left\{z\mid({\hat{B}})_{z}\cap A\neq\varnothing\right\} A⊕B={z∣(B^)z∩A=∅}
A是被膨胀的集合, A和B至少有一个元素重合
1.3 对偶性
膨胀和腐蚀关于集合求补运算和反射运算是对偶的.
2. 开操作和闭操作
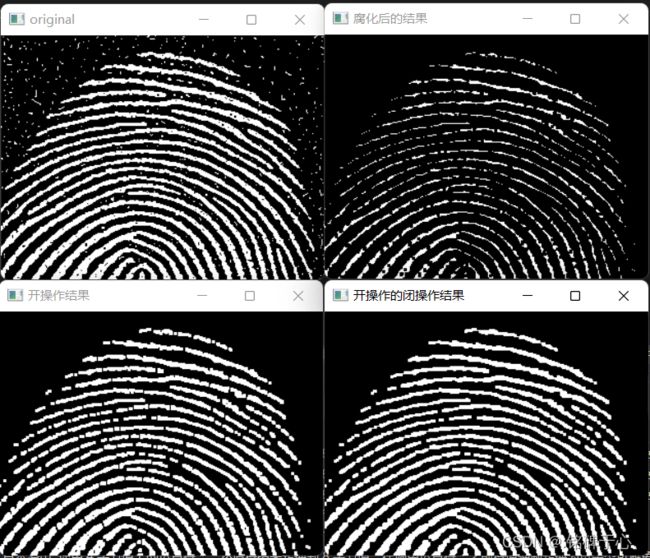
开操作: 平滑物体的轮廓, 断开较窄的狭颈并消除细的突出物.
闭操作: 弥合较窄的间断和细长的沟壑, 消除小的孔洞, 填补轮廓线中的断裂.
结构元B对集合A的开操作:
A ∘ B = ( A ⊖ B ) ⊕ B A\circ B=(A\ominus B)\oplus B A∘B=(A⊖B)⊕B
结构元B对集合A的闭操作:
A ∙ B = ( A ⊕ B ) ⊖ B A\bullet B=(A\oplus B)\ominus B A∙B=(A⊕B)⊖B
opencv有腐化函数erode()和膨胀函数dilate()
Mat openOperationRes(Mat input, int size) {
Mat kernel = Mat::ones(Size(size, size), CV_8U);
//先腐化再膨胀
Mat eroded;
erode(input, eroded, kernel);
Mat opened;
dilate(eroded, opened, kernel);
return opened;
}
Mat closeOperationRes(Mat input, int size) {
Mat kernel = Mat::ones(Size(size, size), CV_8U);
//先膨胀再腐化
Mat dilated;
dilate(input, dilated, kernel);
Mat closed;
erode(dilated, closed, kernel);
return closed;
}
void test05(string path) {
Mat img = imread(path, IMREAD_GRAYSCALE);
if (img.empty()) {
cout << "Unable to load image\n";
return;
}
Mat kernel = Mat::ones(Size(3, 3), CV_8U);
//进行腐化操作
Mat eroded;
erode(img, eroded, kernel);
Mat opened = openOperationRes(img, 3);
Mat opened_closed = closeOperationRes(opened, 3);
imshow("original", img);
imshow("腐化后的结果", eroded);
imshow("开操作结果", opened);
imshow("开操作的闭操作结果", opened_closed);
waitKey(0);
}
3. 击中或不击中变换
形态学上的击中或不击中是形状检测中的一个基本工具。
A ⊛ B = ( A ⊖ B 1 ) ∩ ( A c ⊖ B 2 ) A\circledast B =(A\ominus B_1)\cap (A^c\ominus B_2) A⊛B=(A⊖B1)∩(Ac⊖B2)
其中,令B=(B1, B2),B1表示需要匹配的结构元素构成的集合,B2表示不需要存在的结构元素所构成的集合。通过这样进行需要特征的提取和不需要特征的“抛弃”。
4. 一些基本的形态学算法
4.1 边界提取
在处理二值图像时,效果好
void test06(string path) {
Mat image = imread(path, IMREAD_GRAYSCALE);
if (image.empty()) {
cout << "Unable to load the image\n";
return;
}
Mat kernel = Mat::ones(Size(3, 3), CV_8U);
//进行腐化操作
Mat eroded;
erode(image, eroded, kernel);
imshow("边缘提取", image - eroded);
waitKey(0);
}

4.2 孔洞填充
下例代码针对该公式:
X k = ( X k − 1 ⊕ B ) ∩ A c k = 1 , 2 , 3 , ⋯ X_{k}=(X_{k-1}\oplus B)\cap A^{c}\quad k=1,\,2,3,\,\cdots Xk=(Xk−1⊕B)∩Ack=1,2,3,⋯
当然有逆向思维再里面,先将不是孔洞的部分膨胀满,再取反。
void test07(string path) {
Mat image = imread(path, IMREAD_GRAYSCALE);
if (image.empty()) {
cout << "Unable to load the Image\n";
return;
}
//1. 使用floodFill函数
Mat closedImg = closeOperationRes(image, 3);
Mat floodFillImg = image.clone();
floodFill(floodFillImg, cv::Point(0, 0), Scalar(255));
// Invert floodfilled image
Mat im_floodfill_inv;
bitwise_not(floodFillImg, im_floodfill_inv);
// Combine the two images to get the foreground.
Mat im_out = (image | im_floodfill_inv);
//2. 孔洞填充
//先将画布置全黑,再根据原图取反来得到x0
Mat xk_1 = Mat::zeros(Size(image.cols, image.rows), CV_8U);
Mat xk = Mat::zeros(Size(image.cols, image.rows), CV_8U);
Mat ac = ~image;
Mat B = (Mat_<uchar>(3, 3) << 0, 1, 0, 1, 1, 1, 0, 1, 0);
//从(0,0)开始进行膨胀,这个位置不能是原图孔洞待的位置
//当然可以多弄几个点开始,减少迭代次数
xk_1.at<uchar>(0, 0) = 255;
int cnt = 0;
while (true) {
dilate(xk_1, xk, B); //对xk-1进行膨胀操作
bitwise_and(xk, ac, xk);//与AC进行与操作
Mat diff = xk != xk_1; //元素相同,diff对应位置置为0
int count = countNonZero(diff); //当diff所有元素都为0时(俩个矩阵相等)
if (count == 0)
break;
xk.copyTo(xk_1); //将xk的值拷贝给xk-1, 不能直接xk_1 = xk(两个变量的地址和值都一致, 修改其中一个变量,另一个变量也跟着动)
cnt++;
}
Mat result = ~xk;
imshow("原图", image);
imshow("floodfill结果", im_out);
imshow("x" + to_string(cnt), result);
waitKey(0);
}

总共迭代了1005次,才填充完毕
5. 形态学重建
5.1 测地膨胀和腐蚀
令F表示为标记图像,令G表示为模版图像。标记图像相对于模版的大小为1的测地膨胀定义为:
D G ( 1 ) ( F ) = ( F ⊕ B ) ∩ G D_{G}^{(1)}(F)=(F\oplus B)\cap G DG(1)(F)=(F⊕B)∩G
而F相对于模版G的大小为1的测地腐蚀定义为:
E G ( 1 ) ( F ) = ( F ⊖ B ) ∪ G E_{G}^{(1)}(F)=(F\ominus B)\cup G EG(1)(F)=(F⊖B)∪G
void displayImg(Mat input, string windowName) {
Mat result;
normalize(input, result, 0, 255, NORM_MINMAX);
result.convertTo(result, CV_8U);
namedWindow(windowName, WINDOW_KEEPRATIO);//表示可以修改窗体的大小
imshow(windowName, result);
}
void test08(string path) {
Mat image = imread(path, IMREAD_GRAYSCALE);
if (image.empty()) {
cout << "Unable to load the Image\n";
return;
}
Mat kernel = Mat::ones(Size(1, 51), CV_8U);
Mat eroded;
erode(image, eroded, kernel);
Mat xk_1;
dilate(eroded, xk_1, kernel);
displayImg(xk_1, "开操作结果");
//再进行重建
Mat B = Mat::ones(Size(3, 3), CV_8U);
Mat xk = Mat::zeros(Size(image.cols, image.rows), CV_8U);
int cnt = 0;
while (true) {
dilate(xk_1, xk, B);
bitwise_and(xk, image, xk); //一样的套路,膨胀再取交集
Mat diff = xk_1 != xk;
if (countNonZero(diff) == 0)
break;
xk.copyTo(xk_1);
cnt++;
}
displayImg(image, "原图");
displayImg(xk, "重建解雇xk" + to_string(cnt));
waitKey(0);
}
实例代码如上,重建开操作要求至少一次腐蚀,使用相同的结构元计算开操作,接着进行重建操作。

6. 灰度级形态学
6.1 腐蚀和膨胀
结构元素b对一幅图像f在位置(x,y)处的腐蚀如下式所示,即求3×3区域中最小值
[ f ⊖ b ] ( x , y ) = min ( s , t ) ∈ b { f ( x + s , y + t ) } [f\ominus b]\,(x,y)=\operatorname*{min}_{(s,t)\in b}\{f(x+s,y+t)\} [f⊖b](x,y)=(s,t)∈bmin{f(x+s,y+t)}
而膨胀如下,求3×3区域中的最大值
[ f ⊕ b ] ( x , y ) = max ( s , t ) ∈ b { f ( x − s , y − t ) } [f\oplus b]\,(x,y)=\operatorname*{max}_{(s,t)\in b}\{f(x-s,y-t)\} [f⊕b](x,y)=(s,t)∈bmax{f(x−s,y−t)}
在opencv中使用的依旧是erode()和dilate()
开运算和闭运算也是一样
6.2 一些基本算法
形态学平滑: 使用平坦圆盘结构元对原始图像进行开操作,再进行闭操作
Mat openOperationRes(Mat input, Mat kernel = Mat::ones(Size(3, 3), 0));
Mat closeOperationRes(Mat input, Mat kernel = Mat::ones(Size(3, 3), 0));
void test09(string path) {
Mat img = imread(path, IMREAD_GRAYSCALE);
if (img.empty()) {
cout << "Unable to load the image\n";
return;
}
vector<Mat> vk;
//使用函数直接构建结构元,可以使用cout查看结构元的形状
Mat kernel1 = getStructuringElement(MORPH_ELLIPSE, Size(1, 1));
Mat kernel2 = getStructuringElement(MORPH_ELLIPSE, Size(3, 3));
Mat kernel3 = getStructuringElement(MORPH_ELLIPSE, Size(5, 5));
vk.push_back(kernel1);
vk.push_back(kernel2);
vk.push_back(kernel3);
displayImg(img, "原图");
Mat input;
img.copyTo(input);
for (int i = 0; i < 3; i++) {
Mat opened = openOperationRes(input, vk[i]);
Mat closed = closeOperationRes(opened, vk[i]);
closed.copyTo(input);
displayImg(closed, "第" + to_string(i + 1) + "次操作结果");
}
waitKey(0);
}
Mat openOperationRes(Mat input, Mat kernel) {
//Mat kernel = Mat::ones(Size(size, size), CV_8U);
//先腐蚀再膨胀
Mat eroded;
erode(input, eroded, kernel);
Mat opened;
dilate(eroded, opened, kernel);
return opened;
}
Mat closeOperationRes(Mat input, Mat kernel) {
//Mat kernel = Mat::ones(Size(size, size), CV_8U);
//先膨胀再腐蚀
Mat dilated;
dilate(input, dilated, kernel);
Mat closed;
erode(dilated, closed, kernel);
return closed;
}

形态学梯度: g = ( f ⊕ b ) − ( f ⊖ b ) g=(f\oplus b)-(f\ominus b) g=(f⊕b)−(f⊖b)
顶帽变换和底帽变换:
-
顶帽变换: T h a t ( f ) = f − ( f ∘ b ) T_{hat}(f)=f-(f\circ b) That(f)=f−(f∘b)
-
底帽变换: B h a t ( f ) = ( f ∙ b ) − f B_{hat}(f) = (f\bullet b)-f Bhat(f)=(f∙b)−f
纹理分割:
Mat getMorpGradient(Mat input, Mat kernel = Mat::ones(Size(3, 3), 0));
Mat getMorpGradient(Mat input, Mat kernel) {
Mat dilated;
dilate(input, dilated, kernel);
Mat eroded;
erode(input, eroded, kernel);
return dilated - eroded;
}
void test10(string path) {
Mat img = imread(path, IMREAD_GRAYSCALE);
if (img.empty()) {
cout << "Unable to load the image\n";
return;
}
Mat kernel1 = getStructuringElement(MORPH_ELLIPSE, Size(61, 61));
Mat kernel2 = getStructuringElement(MORPH_ELLIPSE, Size(121, 121));
//Mat kernel1 = Mat::ones(Size(61, 61), CV_8U);
//Mat kernel2 = Mat::ones(Size(121, 121), CV_8U);
Mat closed = closeOperationRes(img, kernel1);
Mat opened = openOperationRes(closed, kernel2);
Mat border = getMorpGradient(opened); //形态学梯度
displayImg(img, "原图");
displayImg(closed, "图b");
displayImg(opened, "图c");
displayImg(img + border, "分割结果");
waitKey(0);
}

6.3 灰度级形态学重建
令f和g分别代表标记图像和模版图像,f可以是经受过腐蚀或者膨胀的图
测地膨胀定义为:
D g ( 1 ) ( f ) = ( f ⊕ b ) ∧ g D_{g}^{(1)}(f)=(f\oplus b)\wedge g Dg(1)(f)=(f⊕b)∧g
f关于g的大小为n的测地膨胀定义为
D g ( n ) ( f ) = D g ( 1 ) [ D g ( n − 1 ) ( f ) ] D_{g}^{(n)}(f)=D_{g}^{(1)}[D_{g}^{(n-1)}(f)] Dg(n)(f)=Dg(1)[Dg(n−1)(f)]
当 D g ( k ) ( f ) = D g ( k + 1 ) D_{g}^{(k)}(f)=D_{g}^{(k+1)} Dg(k)(f)=Dg(k+1)时,相当于重构完毕,测地腐蚀定义类似.
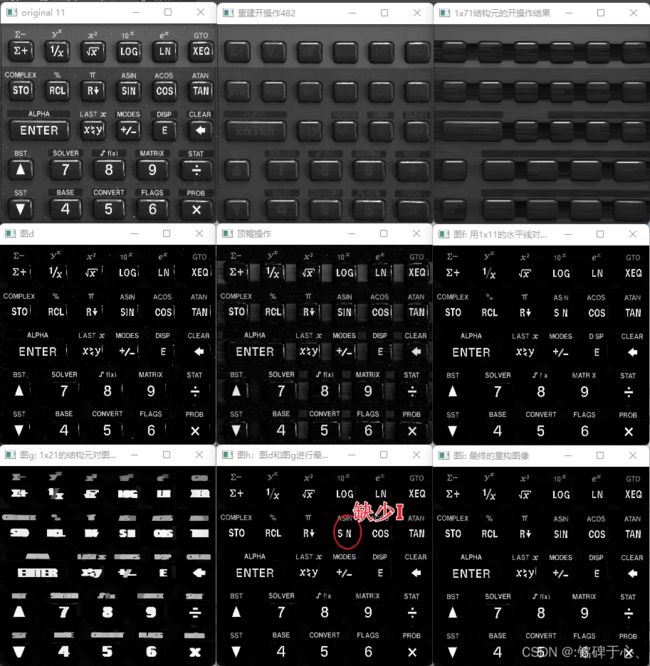
实例: 将复杂的背景均匀化
-
图b:只用1x71的结构元对图a进行开操作,然后得到重建结果。
-
图c:用相同的线仅对原图进行开操作,可以看到图b的背景分布更加均匀(特别是按钮之间的部分)
-
图d:图a减图b的结果(顶帽操作)
-
图e:标准的顶帽操作(图a减图c)
-
图f:对图d进行开操作,该结果作为标记图像,图d作为模版图像,进行重建
-
图g:对图f进行膨胀操作
-
图h:图d和图g进行最小操作的结果(这个时候发现SIN中的I消失了),背景已经很好的均匀化了
-
图i:图g作为标记图像,图d作为模版图像,进行重建(本例的代码如下所示)
Mat reconGrayScale(Mat input, Mat original, int& cnt, Mat elem = Mat::ones(Size(3, 3), 0));
Mat reconGrayScale(Mat input, Mat original, int& cnt, Mat elem) {
int count = 0;
Mat xk_1 = input.clone();
Mat xk;
while (true) {
Mat dilated;
dilate(xk_1, dilated, elem);
xk = min(dilated, original);
count++;
Mat diff = xk_1 != xk;
if (countNonZero(diff) == 0)
break;
xk.copyTo(xk_1);
}
cnt = count;
cout << "重构完毕, 迭代次数为" << count << endl;
return xk;
}
void test11(string path) {
Mat img = imread(path, IMREAD_GRAYSCALE);
if (img.empty()) {
cout << "Unable to load the image\n";
return;
}
int cnt1;
int cnt2;
int cnt3;
Mat element = Mat::ones(Size(71, 1), 0);
Mat opened = openOperationRes(img, element);
Mat reconOpened = reconGrayScale(opened, img, cnt1);//迭代了482次
//cout << "重构完毕\n";
Mat topHatImg;
//开操作和闭操作也有专门的函数
morphologyEx(img, topHatImg, MORPH_TOPHAT, element);
Mat img_d = img - reconOpened;
Mat element2 = Mat::ones(Size(11, 1), 0);
Mat opened2 = openOperationRes(img_d, element2);
Mat img_f = reconGrayScale(opened2, img_d, cnt2);//迭代了113次
//Mat img_f = openOperationRes(img_d, element2);
Mat img_g;
dilate(img_f, img_g, Mat::ones(Size(21, 1), 0));
Mat img_h = min(img_d, img_g);
Mat img_i = reconGrayScale(img_g, img_d, cnt3);//迭代了121次
displayImg(img, "original 11");
displayImg(opened, "1x71结构元的开操作结果");
displayImg(topHatImg, "顶帽操作");
displayImg(reconOpened, "重建开操作" + to_string(cnt1));
//displayImg(reconTophat, "重建顶帽操作" + to_string(cnt2));
displayImg(img_d, "图d");
displayImg(img_f, "图f: 用1x11的水平线对图d进行开操作" + to_string(cnt2));
displayImg(img_g, "图g: 1x21的结构元对图f进行膨胀操作");
displayImg(img_h, "图h:图d和图g进行最小操作");
displayImg(img_i, "图i: 最终的重构图像" + to_string(cnt3));
waitKey(0);
}
7. 小总结
重建是形态学中重要的一个算法。针对二值图像和灰度图像,有略微区别。
重建的步骤:
- 确定好标记图像、模版结构和重建结构元(一般就是正方形结构或者平坦圆盘结构)
- 规定迭代结束时刻的判断。