USART---通用同步异步收发器
一.物理层(RS-232)

RS-232框图
1.电平标准

理想状态下,使用 5V 表示二进制逻辑 1,使用 0V 表示逻辑 0;而为了增加串口通讯的远距离传输及抗干扰能力,它使用-15V 表示逻辑 1,+15V 表示逻辑 0。

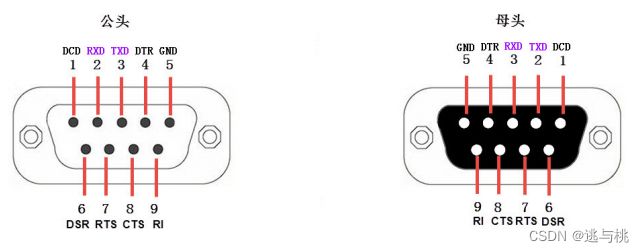
2.RS-232 信号线


二.协议层
串口通讯的数据包由发送设备通过自身的 TXD 接口传输到接收设备的 RXD 接口。
数据包组成:由起始位、主体数据、校验位以及停止位组成。

1.起始和停止信号
串口通讯的一个数据包从起始信号开始,直到停止信号结束。数据包的起始信号由一个逻辑 0 的
数据位表示,而数据包的停止信号可由 0.5、1、1.5 或 2 个逻辑 1 的数据位表示,只要双方约定
一致即可。
2.有效数据
在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效数据的长度
常被约定为 5、6、7 或 8 位长。
3.数据校验
在有效数据之后,有一个可选的数据校验位。
校验方法有奇校验 (odd)、偶校验 (even)、0 校验 (space)、1 校验 (mark) 以及无校验 (noparity)。
- 奇校验要求有效数据和校验位中“1”的个数为奇数,比如一个 8 位长的有效数据为:01101001,此时总共有 4 个“1”,为达到奇校验效果,校验位为“1”,最后传输的数据将是 8 位的有效数据加上 1 位的校验位总共 9 位。
- 偶校验与奇校验要求刚好相反,要求帧数据和校验位中“1”的个数为偶数,比如数据帧:11001010,此时数据帧“1”的个数为 4 个,所以偶校验位为“0”。
- 0 校验是不管有效数据中的内容是什么,校验位总为“0”,1 校验是校验位总为“1”。
4.波特率和比特率
波特率:二进制位数/秒;
波特率:码元/秒。
三.STM的USART
1.框图

功能引脚
- TX:发送数据输出引脚。
- RX:接收数据输入引脚。
- SW_RX:数据接收引脚,只用于单线和智能卡模式,属于内部引脚,没有具体外部引脚。
- nRTS:请求以发送 (Request To Send),n 表示低电平有效。如果使能 RTS 流控制,当 USART 接收器准备好接收新数据时就会将 nRTS 变成低电平;当接收寄存器已满时,nRTS 将被设置为高电平。该引脚只适用于硬件流控制。
- nCTS:清除以发送 (Clear To Send),n 表示低电平有效。如果使能 CTS 流控制,发送器在发送下 一帧数据之前会检测 nCTS 引脚,如果为低电平,表示可以发送数据,如果为高电平则在发送完当前数据帧之后停止发送。该引脚只适用于硬件流控制。
- SCLK:发送器时钟输出引脚。这个引脚仅适用于同步模式。
2.波特率计算

其中,fPLCK 为 USART 时钟,USARTDIV 是一个存放在波特率寄存器 (USART_BRR) 的一个无
符号定点数。其中 DIV_Mantissa[11:0] 位定义 USARTDIV 的整数部分,DIV_Fraction[3:0] 位定义
USARTDIV 的小数部分。
例如:DIV_Mantissa=24(0x18),DIV_Fraction=10(0x0A),此时 USART_BRR 值为 0x18A;那么 USARTDIV 的小数位 10/16=0.625;整数位 24,最终 USARTDIV 的值为 24.625。
如果知道 USARTDIV 值为 27.68,那么 DIV_Fraction=16*0.68=10.88,最接近的正整数为 11,所
以 DIV_Fraction[3:0] 为 0xB;DIV_Mantissa= 整数 (27.68)=27,即为 0x1B。
3.中断控制

4.结构体
USART 初始化结构体

- 1) USART_BaudRate:波特率设置。一般设置为 2400、9600、19200、115200。标准库函数会根据设定值计算得到 USARTDIV 值,从而设置 USART_BRR 寄存器值。
- 2) USART_WordLength:数据帧字长,可选 8 位或 9 位。它设定 USART_CR1 寄存器的 M 位的值。如果没有使能奇偶校验控制,一般使用 8 数据位;如果使能了奇偶校验则一般设置为 9 数据位。
- 3) USART_StopBits:停止位设置,可选 0.5 个、1 个、1.5 个和 2 个停止位,它设定 USART_CR2寄存器的 STOP[1:0] 位的值,一般我们选择 1 个停止位。
- 4) USART_Parity:奇偶校验控制选择,可选 USART_Parity_No(无校验)、USART_Parity_Even(偶校验) 以及 USART_Parity_Odd(奇校验),它设定 USART_CR1 寄存器的 PCE 位和 PS 位的值。
- 5) USART_Mode:USART 模式选择,有 USART_Mode_Rx 和 USART_Mode_Tx,允许使用逻辑或运算选择两个,它设定 USART_CR1 寄存器的 RE 位和 TE 位。
- 6) USART_HardwareFlowControl:硬件流控制选择,只有在硬件流控制模式才有效,可选有使能RTS、使能 CTS、同时使能 RTS 和 CTS、不使能硬件流。
USART时钟初始化结构体

- 1) USART_Clock:同步模式下 SCLK 引脚上时钟输出使能控制,可选禁止时钟输出 (USART_Clock_Disable) 或开启时钟输出 (USART_Clock_Enable);如果使用同步模式发送,一般都需要开启时钟。它设定 USART_CR2 寄存器的 CLKEN 位的值。
- 2) USART_CPOL:同步模式下 SCLK 引脚上输出时钟极性设置,可设置在空闲时 SCLK 引脚为低电平 (USART_CPOL_Low) 或高电平 (USART_CPOL_High)。它设定 USART_CR2 寄存器的 CPOL位的值。
- 3) USART_CPHA:同步模式下 SCLK 引脚上输出时钟相位设置,可设置在时钟第一个变化沿捕获数据 (USART_CPHA_1Edge) 或在时钟第二个变化沿捕获数据。它设定 USART_CR2 寄存器的CPHA 位的值。USART_CPHA 与 USART_CPOL 配合使用可以获得多种模式时钟关系。
- 4) USART_LastBit:选择在发送最后一个数据位的时候时钟脉冲是否在 SCLK 引脚输出,可以是不输出脉冲 (USART_LastBit_Disable)、输出脉冲 (USART_LastBit_Enable)。它设定 USART_CR2 寄存器的 LBCL 位的值。
四.实验
1.实验1:USART1接发
编程步骤:
- 1) 使能 RX 和 TX 引脚 GPIO 时钟和 USART 时钟;
- 2) 初始化 GPIO,并将 GPIO 复用到 USART 上;
- 3) 配置 USART 参数;
- 4) 配置中断控制器并使能 USART 接收中断;
- 5) 使能 USART;
- 6) 在 USART 接收中断服务函数实现数据接收和发送。
usart.c
#include "usart.h"
/**
* @brief 配置嵌套向量中断控制器NVIC
* @param 无
* @retval 无
*/
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 嵌套向量中断控制器组选择 */
/* 提示 NVIC_PriorityGroupConfig() 在整个工程只需要调用一次来配置优先级分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* 配置USART为中断源 */
NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
/* 抢断优先级*/
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* 子优先级 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化配置NVIC */
NVIC_Init(&NVIC_InitStructure);
}
/**
* @brief USART GPIO 配置,工作参数配置
* @param 无
* @retval 无
*/
void usart_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口GPIO的时钟
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// 串口中断优先级配置
NVIC_Configuration();
// 使能串口接收中断
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
/***************** 发送一个字符 **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{
/* 发送一个字节数据到USART */
USART_SendData(pUSARTx,ch);
/* 等待发送数据寄存器为空 */
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
/***************** 发送字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{
unsigned int k=0;
do
{
Usart_SendByte( pUSARTx, *(str + k) );
k++;
} while(*(str + k)!='\0');
/* 等待发送完成 */
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET)
{}
}
/***************** 发送一个16位数 **********************/
void Usart_SendHalfWord( USART_TypeDef * pUSARTx, uint16_t ch)
{
uint8_t temp_h, temp_l;
/* 取出高八位 */
temp_h = (ch&0XFF00)>>8;
/* 取出低八位 */
temp_l = ch&0XFF;
/* 发送高八位 */
USART_SendData(pUSARTx,temp_h);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
/* 发送低八位 */
USART_SendData(pUSARTx,temp_l);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口 */
USART_SendData(DEBUG_USARTx, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
return (ch);
}
///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
/* 等待串口输入数据 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(DEBUG_USARTx);
}
usart.h
#ifndef _USART_H
#define _USART_H
#include "stm32f10x.h"
#include
#define DEBUG_USART1 1
#define DEBUG_USART2 0
#define DEBUG_USART3 0
#define DEBUG_USART4 0
#define DEBUG_USART5 0
/**
* 串口宏定义,不同的串口挂载的总线和IO不一样,移植时需要修改这几个宏
* 1-修改总线时钟的宏,uart1挂载到apb2总线,其他uart挂载到apb1总线
* 2-修改GPIO的宏
*/
#if DEBUG_USART1
// 串口1-USART1
#define DEBUG_USARTx USART1
#define DEBUG_USART_CLK RCC_APB2Periph_USART1
#define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10
#define DEBUG_USART_IRQ USART1_IRQn
#define DEBUG_USART_IRQHandler USART1_IRQHandler
#elif DEBUG_USART2
串口2-USART2
#define DEBUG_USARTx USART2
#define DEBUG_USART_CLK RCC_APB1Periph_USART2
#define DEBUG_USART_APBxClkCmd RCC_APB1PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_2
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_3
#define DEBUG_USART_IRQ USART2_IRQn
#define DEBUG_USART_IRQHandler USART2_IRQHandler
#elif DEBUG_USART3
串口3-USART3
#define DEBUG_USARTx USART3
#define DEBUG_USART_CLK RCC_APB1Periph_USART3
#define DEBUG_USART_APBxClkCmd RCC_APB1PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOB)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOB
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_10
#define DEBUG_USART_RX_GPIO_PORT GPIOB
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_11
#define DEBUG_USART_IRQ USART3_IRQn
#define DEBUG_USART_IRQHandler USART3_IRQHandler
#elif DEBUG_USART4
串口4-UART4
#define DEBUG_USARTx UART4
#define DEBUG_USART_CLK RCC_APB1Periph_UART4
#define DEBUG_USART_APBxClkCmd RCC_APB1PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOC)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOC
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_10
#define DEBUG_USART_RX_GPIO_PORT GPIOC
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_11
#define DEBUG_USART_IRQ UART4_IRQn
#define DEBUG_USART_IRQHandler UART4_IRQHandler
#elif DEBUG_USART5
串口5-UART5
#define DEBUG_USARTx UART5
#define DEBUG_USART_CLK RCC_APB1Periph_UART5
#define DEBUG_USART_APBxClkCmd RCC_APB1PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOC
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_12
#define DEBUG_USART_RX_GPIO_PORT GPIOD
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_2
#define DEBUG_USART_IRQ UART5_IRQn
#define DEBUG_USART_IRQHandler UART5_IRQHandler
#endif
void usart_Init(void);
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch);
void Usart_SendString( USART_TypeDef * pUSARTx, char *str);
void Usart_SendHalfWord( USART_TypeDef * pUSARTx, uint16_t ch);
#endif
led.c
#include "led.h"
void led_gpio_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(LED0_GPIO_CLK,ENABLE);//注意需要用到的总线
GPIO_InitStruct.GPIO_Pin = LED0_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(LED0_GPIO_PORT,&GPIO_InitStruct);
GPIO_ResetBits(LED0_GPIO_PORT,LED0_GPIO_PIN);
}
void assert_failed(uint8_t* file, uint32_t line)
{
// 断言错误时执行的代码
LED0(1);
}
led.h
#ifndef _LED_H
#define _LED_H
#include "stm32f10x.h"
#define LED0_GPIO_CLK RCC_APB2Periph_GPIOB
#define LED0_GPIO_PORT GPIOB
#define LED0_GPIO_PIN GPIO_Pin_5
/******************************************************************************************/
/* LED端口定义 */
#define LED0(x) do{ x ? \
GPIO_SetBits(LED0_GPIO_PORT, LED0_GPIO_PIN) : \
GPIO_ResetBits(LED0_GPIO_PORT, LED0_GPIO_PIN); \
}while(0) /* LED0翻转 */
#define digitalToggle(p,i) {p->ODR ^=i;} //输出反转状态
#define LED0_Toggle digitalToggle(LED0_GPIO_PORT,LED0_GPIO_PIN)
void led_gpio_init(void);
#endif
stm32f10x_it.c
/**
******************************************************************************
* @file Project/STM32F10x_StdPeriph_Template/stm32f10x_it.c
* @author MCD Application Team
* @version V3.6.0
* @date 20-September-2021
* @brief Main Interrupt Service Routines.
* This file provides template for all exceptions handler and
* peripherals interrupt service routine.
******************************************************************************
* @attention
*
* Copyright (c) 2011 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x_it.h"
#include "usart.h"
/** @addtogroup STM32F10x_StdPeriph_Template
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/******************************************************************************/
/* Cortex-M3 Processor Exceptions Handlers */
/******************************************************************************/
/**
* @brief This function handles NMI exception.
* @param None
* @retval None
*/
void NMI_Handler(void)
{
}
/**
* @brief This function handles Hard Fault exception.
* @param None
* @retval None
*/
void HardFault_Handler(void)
{
/* Go to infinite loop when Hard Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Memory Manage exception.
* @param None
* @retval None
*/
void MemManage_Handler(void)
{
/* Go to infinite loop when Memory Manage exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Bus Fault exception.
* @param None
* @retval None
*/
void BusFault_Handler(void)
{
/* Go to infinite loop when Bus Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Usage Fault exception.
* @param None
* @retval None
*/
void UsageFault_Handler(void)
{
/* Go to infinite loop when Usage Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles SVCall exception.
* @param None
* @retval None
*/
void SVC_Handler(void)
{
}
/**
* @brief This function handles Debug Monitor exception.
* @param None
* @retval None
*/
void DebugMon_Handler(void)
{
}
/**
* @brief This function handles PendSVC exception.
* @param None
* @retval None
*/
void PendSV_Handler(void)
{
}
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
void SysTick_Handler(void)
{
}
// 串口中断服务函数
void DEBUG_USART_IRQHandler(void)
{
uint8_t ucTemp;
if(USART_GetITStatus(DEBUG_USARTx,USART_IT_RXNE)!=RESET)
{
ucTemp = USART_ReceiveData(DEBUG_USARTx);
USART_SendData(DEBUG_USARTx,ucTemp);
}
}
/******************************************************************************/
/* STM32F10x Peripherals Interrupt Handlers */
/* Add here the Interrupt Handler for the used peripheral(s) (PPP), for the */
/* available peripheral interrupt handler's name please refer to the startup */
/* file (startup_stm32f10x_xx.s). */
/******************************************************************************/
/**
* @brief This function handles PPP interrupt request.
* @param None
* @retval None
*/
/*void PPP_IRQHandler(void)
{
}*/
/**
* @}
*/
main.c
#include "stm32f10x.h"
#include "led.h"
#include "usart.h"
int main()
{
char ch;
led_gpio_init();
usart_Init();
while(1)
{
ch = getchar();
printf("%c\n",ch);
}
}
2.实验2:USART1控制LED
这里我们取消了中断,其他操作一致
usart.c
#include "usart.h"
/**
* @brief USART GPIO 配置,工作参数配置
* @param 无
* @retval 无
*/
void usart_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口GPIO的时钟
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
/***************** 发送一个字符 **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{
/* 发送一个字节数据到USART */
USART_SendData(pUSARTx,ch);
/* 等待发送数据寄存器为空 */
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
/***************** 发送字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{
unsigned int k=0;
do
{
Usart_SendByte( pUSARTx, *(str + k) );
k++;
} while(*(str + k)!='\0');
/* 等待发送完成 */
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET)
{}
}
/***************** 发送一个16位数 **********************/
void Usart_SendHalfWord( USART_TypeDef * pUSARTx, uint16_t ch)
{
uint8_t temp_h, temp_l;
/* 取出高八位 */
temp_h = (ch&0XFF00)>>8;
/* 取出低八位 */
temp_l = ch&0XFF;
/* 发送高八位 */
USART_SendData(pUSARTx,temp_h);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
/* 发送低八位 */
USART_SendData(pUSARTx,temp_l);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口 */
USART_SendData(DEBUG_USARTx, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
return (ch);
}
///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
/* 等待串口输入数据 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(DEBUG_USARTx);
}
stm32f10x_it.c
/**
******************************************************************************
* @file Project/STM32F10x_StdPeriph_Template/stm32f10x_it.c
* @author MCD Application Team
* @version V3.6.0
* @date 20-September-2021
* @brief Main Interrupt Service Routines.
* This file provides template for all exceptions handler and
* peripherals interrupt service routine.
******************************************************************************
* @attention
*
* Copyright (c) 2011 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x_it.h"
#include "usart.h"
/** @addtogroup STM32F10x_StdPeriph_Template
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/******************************************************************************/
/* Cortex-M3 Processor Exceptions Handlers */
/******************************************************************************/
/**
* @brief This function handles NMI exception.
* @param None
* @retval None
*/
void NMI_Handler(void)
{
}
/**
* @brief This function handles Hard Fault exception.
* @param None
* @retval None
*/
void HardFault_Handler(void)
{
/* Go to infinite loop when Hard Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Memory Manage exception.
* @param None
* @retval None
*/
void MemManage_Handler(void)
{
/* Go to infinite loop when Memory Manage exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Bus Fault exception.
* @param None
* @retval None
*/
void BusFault_Handler(void)
{
/* Go to infinite loop when Bus Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Usage Fault exception.
* @param None
* @retval None
*/
void UsageFault_Handler(void)
{
/* Go to infinite loop when Usage Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles SVCall exception.
* @param None
* @retval None
*/
void SVC_Handler(void)
{
}
/**
* @brief This function handles Debug Monitor exception.
* @param None
* @retval None
*/
void DebugMon_Handler(void)
{
}
/**
* @brief This function handles PendSVC exception.
* @param None
* @retval None
*/
void PendSV_Handler(void)
{
}
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
void SysTick_Handler(void)
{
}
/******************************************************************************/
/* STM32F10x Peripherals Interrupt Handlers */
/* Add here the Interrupt Handler for the used peripheral(s) (PPP), for the */
/* available peripheral interrupt handler's name please refer to the startup */
/* file (startup_stm32f10x_xx.s). */
/******************************************************************************/
/**
* @brief This function handles PPP interrupt request.
* @param None
* @retval None
*/
/*void PPP_IRQHandler(void)
{
}*/
/**
* @}
*/
main.c
#include "stm32f10x.h"
#include "led.h"
#include "usart.h"
int main()
{
char ch;
led_gpio_init();
usart_Init();
while(1)
{
ch = getchar();
printf("%c\n",ch);
/* 根据字符指令控制RGB彩灯颜色 */
switch(ch)
{
case '1':
LED0(1);
break;
default:
LED0(0);
printf("输入错误\n");
break;
}
}
}