11.3编写Linux串口驱动
编写串口驱动主要步骤
- 构建并初始化 struct console 对象,若串口无需支持 console 可省略此步骤
//UART驱动的console
static struct uart_driver virt_uart_drv;
static struct console virt_uart_console = {
//console 的名称,配合index字段使用,如果name为“ttyVIRT”,且index字段为小于0,则可以和“console=ttyVIRT“(n=0,1,2…)来确定index字段的值
.name = "ttyVIRT",
//操作函数集合
.device = virt_uart_console_device,
.write = virt_uart_console_write,
.setup = virt_uart_console_setup,
//CON_PRINTBUFFER表示从buffer中的第一行log开始打印
//CON_CONSDEV表示从earlycon没有打印的log开始打印
.flags = CON_PRINTBUFFER,
//index小于0时通过bootargs参数确定其值
.index = -1,
//console私有数据,这里用于记录拥有此console的串口驱动
.data = &virt_uart_drv,
};
- 构建并初始化 struct uart_driver 对象
//UART驱动
static struct uart_driver virt_uart_drv = {
.owner = THIS_MODULE,
//驱动名称,在dev文件系统中以此为前缀生成设备文件名
.driver_name = "VIRT_UART",
//设备名称
.dev_name = "ttyVIRT",
//主设备号和次设备号起始值
.major = 0,
.minor = 0,
//只有一个端口
.nr = 1,
//UART的console
.cons = &virt_uart_console,
};
- 使用 uart_register_driver 函数注册串口驱动
//注册串口驱动
result = uart_register_driver(&virt_uart_drv);
if(result < 0)
{
printk("register uart driver failed\r\n");
return result;
}
- 构建并初始化 struct uart_port 对象
//UART端口
static struct uart_port virt_port = {};
//设置端口
virt_port.line = 0;
//端口所属设备
virt_port.dev = &pdev->dev;
//串口寄存器物理基地址,iobase、mapbase、membase不能全部为0,否则在初始化时不会执行端口配置操作
virt_port.mapbase = 1;
//端口类型,不能为PORT_UNKNOWN
virt_port.type = PORT_8250;
//io访问方式
virt_port.iotype = UPIO_MEM;
//串口的中断号
virt_port.irq = 0;
//串口端口发送FIFO大小
virt_port.fifosize = 32;
//操作函数集合
virt_port.ops = &virt_uart_ops;
//RS485配置函数
virt_port.rs485_config = NULL;
//执行自动配置,但不探测UART类型
virt_port.flags = UPF_BOOT_AUTOCONF | UPF_FIXED_TYPE;
- 使用 uart_add_one_port 函数在 uart_driver 添加串口端口
//在串口驱动下添加端口
result = uart_add_one_port(&virt_uart_drv, &virt_port);
if(result < 0)
{
printk("add uart port failed\n");
return result;
}
编写串口驱动
这里以一个虚拟串口为例来介绍串口驱动的编写,它在 proc 文件系统中创建了一个文件,通过向这个文件写入数据来模拟串口硬件的接收(写入数据时先将数据写入到虚拟串口接收FIFO中,然后调度工作队列,用以模拟串口中断处理函数来处理写入到虚拟串口接收FIFO中的数据),通过串口发送的数据会写入虚拟串口发送FIFO中,然后可以通过这个文件来读取虚拟串口发送FIFO中的数据,用于模拟串口硬件发送。
编写设备树
在顶层设备树根节点中加入如下节点:
virtual_uart: virtual_uart_controller {
compatible = "atk,virtual_uart";
};
用make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- dtbs -j8编译设备树(arm-none-linux-gnueabihf-是编译器前缀),然后用新的.dtb文件启动系统
驱动代码编写
驱动代码的要点前面已经介绍过了,这里给出驱动程序的完整代码:
#include 串口测试程序
测试程序可以使用11.1Linux串口应用程序开发中编写的串口回环用于程序。
上机实验
- 修改设备树,在顶层设备树根节点中加入描述虚拟串口的设备节点,然后编译设备树,用新的设备树启动目标板
- 从这里下载测试程序,并进行编译,然后拷贝到目标板根文件系统的root目录
- 从这里下载驱动程序并进行编译,然后拷贝到目标板根文件系统的root目录
- 执行命令 insmod virtual_uart.ko 加载驱动程序

- 执行命令 ./uart_teat.out /dev/ttyVIRT0 运行测试程序
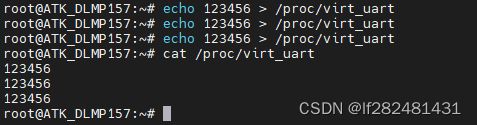
- 另开一个终端,在终端中执行命令 echo 123456 > /proc/virt_uart 模拟串口硬件接收数据,执行命令 cat /proc/virt_uart 模拟串口硬件发送数据,在执行命令过程中 ./uart_teat.out 程序也会打印它收到的字节数。