11-1 FCW/AEB 设计依赖的 E-NCAP 评测标准详细解析
本专题由深圳季连李博及团队出品,重点讲解 AEB 工作原理、系统/软件架构及需求、算法建模、CCRs/CCRb/CCRm 建模与仿真、VRU-AEB-B/P/M 建模与仿真。
本章节同时还提供了测试用例,目的是将 AEB 算法快速地产品化。因测试用例涉及公司机密,需要的读者请私聊,vx:AIgraphX。
PS:太空大卫飞梭是AIgraphX原csdn账号名。
1. E-NCAP
E-NCAP (European New Car Assessment Programme)欧洲新车安全评鉴协会,是专门针对量产车型的安全性进行 5 星级评测的机构。它创始于 1997 年,英国交通研究实验室以及英国运输部发起,由欧洲七个政府组织组成,目前已经成为汽车界最具权威的安全认证机构。
该评估项目包括碰撞测试、车辆主动安全性能测试、被动安全性能测试、儿童乘客安全性能测试等。评估结果可以为消费者提供购买汽车的参考,同时也可以促使汽车制造商不断改进车辆的安全性能。
E-NCAP 安全评测未来可能会更关注:
1.更严格的碰撞测试:加入更为严格的碰撞测试,例如更高的碰撞速度和更复杂的碰撞场景等。
2.电动汽车安全测试:电动汽车的电池安全是消费者购车关注的重点,E-NCAP 可能会加入更多电动汽车电池燃烧和泄漏的测试。
3.虚拟场景和 V2X 场景的支持,因自动驾驶的特殊情况,需要更多虚拟场景的仿真测试支持、V2X 参考场景支持。
本文主要包括道路使用者 (VRU) 保护及安全辅助 (SA) 两部分评测内容。
2. E-NCAP 评测标准
2.1 E-NCAP 评测维度
ENCAP 的评测内容共分为四大维度:AOP(Adult Occupant Protection), COP(Child Occupant Protection), VRU(Vulnerable Road User Protection), SA(Safety Assist)。
2.2 四大维度的权重占比
四大维度权重占比如下:AOP:40%,COP:20%,VRU:20%,SA:20%。

2.3 四大维度的评测场景及对应分数
总分分布情况如下:
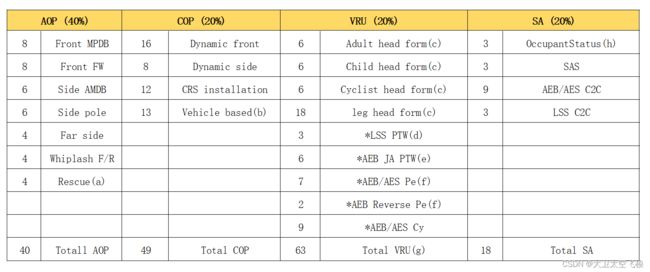
本文将不对成人乘员保护和儿童乘员保护中的相关功能进行分析,仅关注道路使用者(VRU)保护和安全辅助(SA)并对其进行拆分。

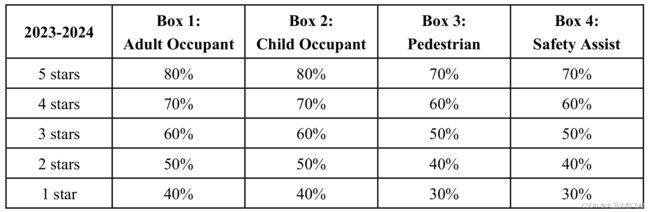
2.4 评星标准
本文介绍了评分场景及其标准分数,并强调实际测评时需要将实际分数与标准分数作比较,以得出对应星级。例如,若安全辅助(SA)总分为 18 分,想要达到 5 星标准,则需获得实际测评分数为 18*70%=12.6 分。
在 E-NCAP-2023 中想取得五星,每部分需满足最低得分要求:AOP ≥ 80%,COP ≥ 80%,VRU ≥ 70%,SA ≥ 70%。

3. 自动驾驶相关评测场景
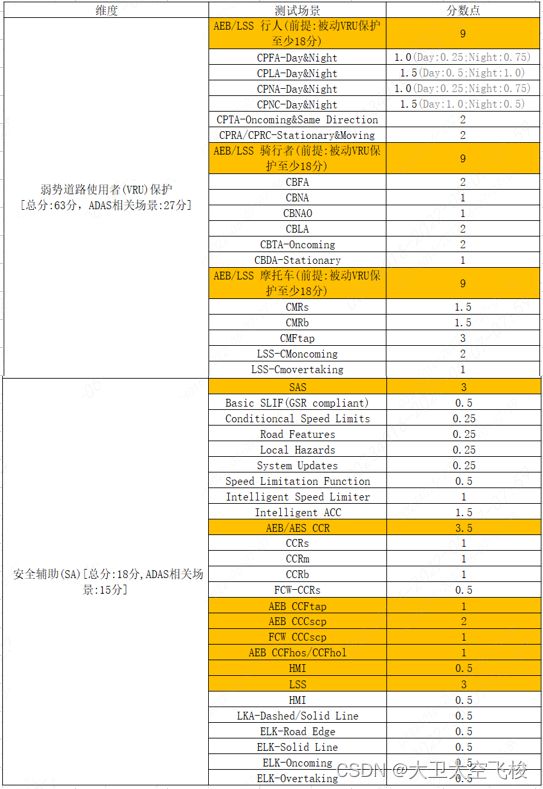
本文精简了成人乘员保护、儿童乘员保护、弱势道路使用者保护和安全辅助四个场景中,与高级驾驶辅助系统无关的功能评测场景,只将与高级驾驶辅助系统有关的评测场景拆解出来。在此过程中,我们可以发现,在弱势道路使用者保护和安全辅助中,总分分别为 63 分和 18 分,但与高级驾驶辅助系统有关的分数却仅分别为 27 分和 15 分。
4. 评测方法及评测标准 — VRU
在明确高级驾驶辅助系统相关场景之后,下一步是确定评测内容、评测方法和评分标准,即具体从哪些方面进行评测,以什么方法进行评测,以及对评测结果如何打分等问题。
4.1 评测内容
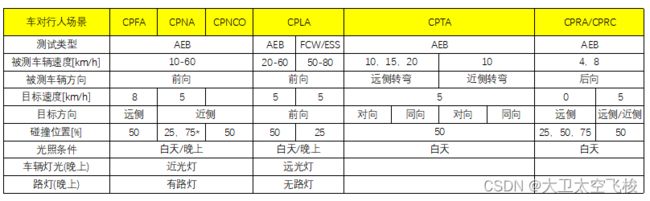
我们将按照下图中每个场景的测试要求进行评测,通过测试相应的项次来衡量被测车辆对每个场景的处理能力。
4.2 评测方法 — 车对行人 C2P 场景
4.3 评测方法 — 车对自行者 C2B 场景

4.3 评测方法 — 车对摩托车 C2M 场景

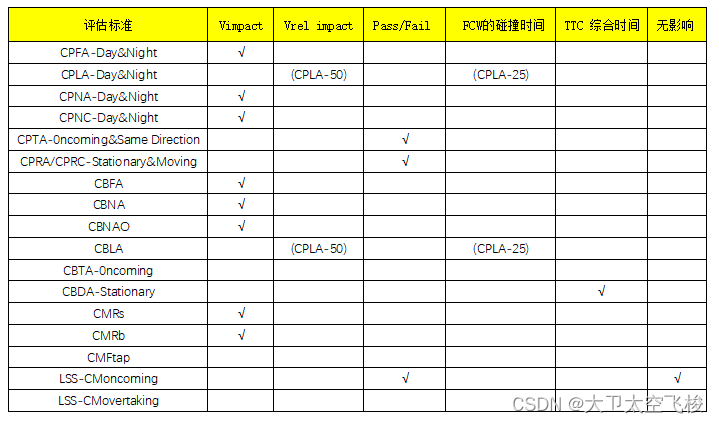
4.4 评分标准
4.4.1 Vimpact
Vimpact:碰撞速度,即当前测试车辆前端或者后端轮廓线与目标虚拟盒重合时的速度。
在测出 Vimpact 值后,根据以下图计算出对应的分数。
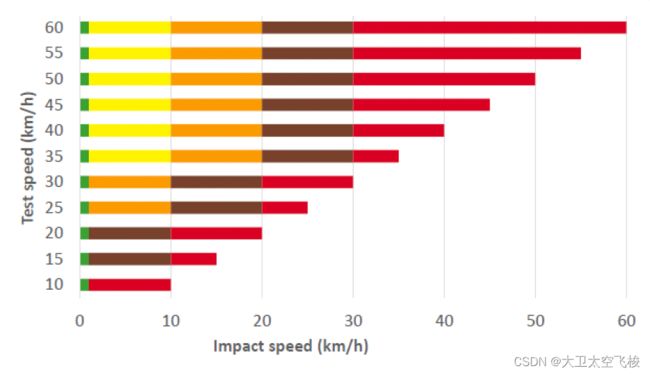
图中对每个测试速度下的“碰撞速度” (Vimpact)都作出了详细说明,测试者可以通过实测得到的实际碰撞速度,对照上述图表,得出其所对应的颜色。需要注意的是,不同的颜色所代表的比例并不相同,具体如下所示。

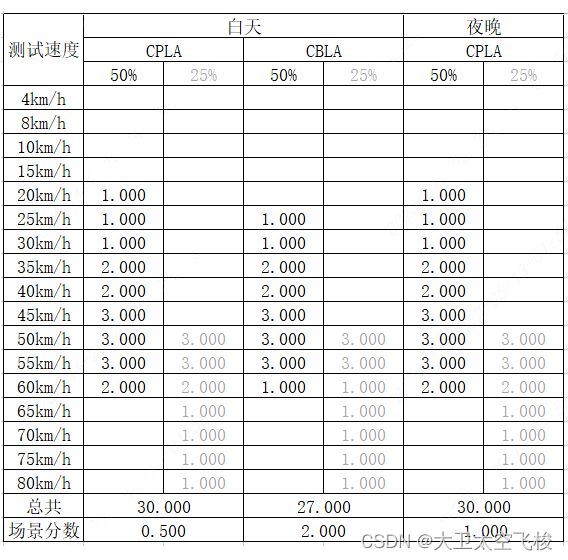
通过对照上述表格,可以得知每个测试速度下所对应的比例,这些比例在实际测试中将会发挥怎样的作用呢?实际上,每个测试速度下都设有一个标准分数。将上述比例乘以相应的标准分数,即可得出在对应测试速度下的实际分数。每个测试速度下所对应的标准分数如下。

经过上述计算,我们可以得到在每个测试速度下的实测分数。接着,将每个测试速度下的得分相加,得到总分数,然后与标准总分相比对。例如,在测试区间为10-60 时,CPFA 场景最终得分为18 分。从表格中可以看出,CPFA 场景的标准总分为 20 分,这相当于在该场景下获得了 90% 的分数。现在我们将 90% 乘以 CPFA 场景分数(0.250),得出 0.225 分,即为 CPFA 场景的成绩。
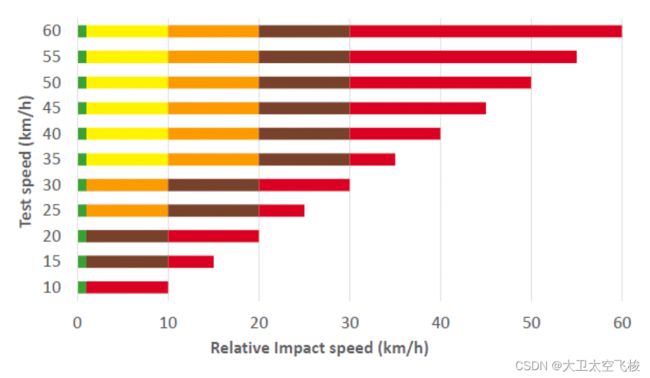
4.4.2 Vrel_impact
被测车辆撞击目标时的相对速度
针对Vrel_impact的评分计算,与Vimpact类似,首先需要进行颜色判断,以确定每个测试速度下的分数。接下来,根据颜色的不同,我们可以计算每个测试速度下所占的比例,并进一步计算总分数、得分比。最终,通过将得分比乘以场景分数,可以得到最终的实测场景分数。
4.4.3 Pass/Fail
根据不同场景下对 Pass 和 Fail 的定义的区别,可以得到以下表格,其中 CBTA/CMFtap 要求被测车辆不能进入目标 EBTa 或 EMT 的路径,CPTA 则要求碰撞车辆速度为 0,而 CPRA-s/CPRC-s 的要求则比较复杂,需要每个测试速度都必须避免所有 3 种重叠才算通过。根据表格,我们可以得出不同测试速度下的分数对应的得分比。
然后计算总分,算出得分比,乘以场景分数,得到最终的实测场景分数。
4.4.4 TTC
当 TTC≥1.7s 发出警报时,可获取分数;
或者 TTC<1.7s 时,制造商能够证明 ESS 可以避免碰撞。
根据所测得的 TTC(Time to Collision)时间,可以决定能否获取对应测试速度下的分数。也就是说,TTC 在合理的范围内时,即可获得相应测试速度下的分数。
然后计算总分,算出得分比,乘以场景分数,得到最终的实测场景分数。
4.4.5 综合时间
根据TTC时间的不同,系统会提供不同的信息和警告。
当 TTC≥2.3s 时,提供视觉信息;
当 TTC≥1.7s 时,提供视觉和(听觉或触觉)警告;
当 1.7s≥TTC≥-0.4s 时,车门保持系统被激活。
同时,当存在威胁时,系统有对对应侧的所有车门发出有效的警告或保持功能。此外,在前侧窗的视野内会提供视觉信息。如果系统在存在威胁的一侧的所有车门上都发出了有效的警告或保持功能,系统将获得“所有其他侧门”分数。

4.4.6 无碰撞
CMoncoming/CMovertaking:在测试期间,VUT 不允许与超车或迎面而来的摩托车目标接触。每个场景会根据测试结果的通过或不通过基础授予可用分数,而每个场景都需要通过所有横向速度和测试速度组合才能得分。换言之,必须在所有测试场景中成功通过,才能获得总分数。

5. VRU 场景详细解析
5.1 Car-to-Pedestrian Scenarios C2P 场景

5.1.1 Car-to-Pedestrian Farside Adult CPFA-50

测试场景描述如下:
测试车辆 (VUT) 向前行驶,遭遇一名穿过路口的成年行人,而在 VUT 未施加制动时,其前面结构以车辆宽度的 50% 处与行人碰撞。
测试内容描述如下:
在白天的状况下(夜晚要有路灯且开启近光灯),成年行人从距车辆中心 6m 处开始加速,经过 1.5m 加速至 8km/h。此时 VUT 以速度 10-60km/h [步长为5km/h] 速度行驶,与行人在 50% 处发生碰撞。在碰撞发生时,测试 VUT 与行人之间的碰撞速度 Vimpact。
5.1.2 Car-to-Pedestrian Nearside Adult CPNA-25/75

测试场景描述如下:
测试车辆 (VUT) 向前行驶,遭遇一名从近侧穿过其路径的成年行人,而在 VUT 未施加制动时,其前部结构以车辆宽度的 25%&75% 处与行人碰撞。
测试内容描述如下:
在白天的状况下(夜晚要有路灯且开启近光灯),成年行人从距车辆中心 4m 处开始加速,经过 1m 加速至 5km/h。此时 VUT 以速度 10-60km/h [步长为5km/h] 速度行驶,与行人在 25%&75% 处发生碰撞。在碰撞发生时,测试 VUT 与行人之间的碰撞速度 Vimpact。
5.1.3 Car-to-Pedestrian Nearside Child Obstructed CPNCO-50
又名鬼探头
测试场景描述如下:
测试车辆 (VUT) 向前行驶,遭遇一名从近侧障碍物后面穿过其路径的儿童行人,而在 VUT 未施加制动时,其前部结构以车辆宽度的 50% 处与行人碰撞。
测试内容描述如下:
在白天的状况下(夜晚要有路灯且开启近光灯),目标儿童从前方障碍物后面距车辆中心 4m 处开始加速,经过 1m 加速至 5km/h。此时 VUT 以速度 10-60km/h [步长为5km/h] 速度行驶,与行人在 50% 处发生碰撞。在碰撞发生时,测试 VUT 与行人之间的碰撞速度 Vimpact。
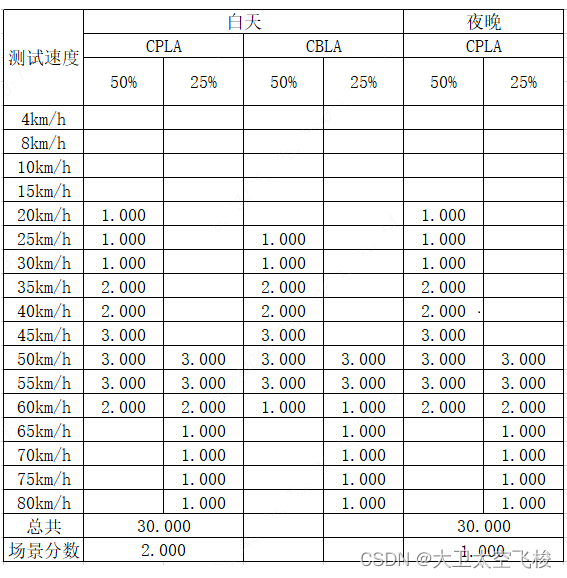
5.1.4 Car-to-Pedestrian Longitudinal Adult CPLA-50
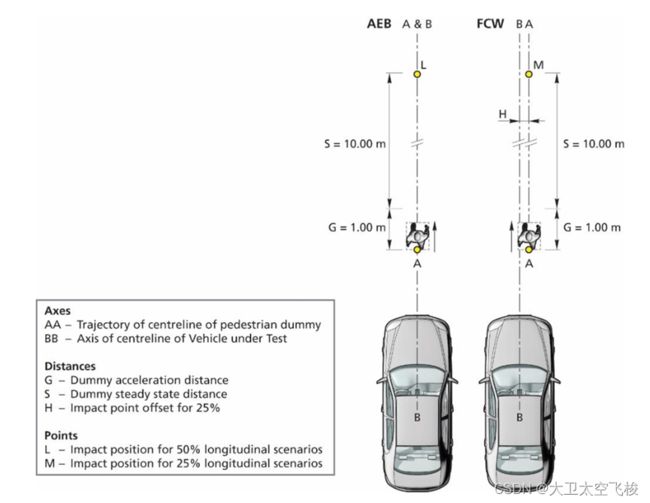
测试场景 (AEB) 描述:
测试车辆 (VUT) 向前行驶,遭遇一名以相同方向行走的成人行人,而在 VUT 未施加制动时,其前部结构以车辆宽度的 50% 处与行人碰撞。
测试内容描述如下:
在白天的状况下(夜晚要有路灯且开启近光灯),测试车辆 (VUT)前方目标行人以相同方向行走, 行人经过 1m 加速至 5km/h,之后再行走 10m 。此时 VUT 以速度 20-60km/h [步长为5km/h] 速度行驶,与行人在 50% 处发生碰撞。在碰撞发生时,测试 VUT 与行人之间的相对碰撞速度 Vrel_impact。
测试场景 (FCW/ESS)描述:
测试车辆 (VUT) 向前行驶,遭遇一名以相同方向行走的成人行人,而在 VUT 未施加制动时,其前部结构以车辆宽度的 25% 处与行人碰撞。
测试内容描述如下:
在白天的状况下(夜晚要有路灯且开启近光灯),测试车辆 (VUT)前方目标行人以相同方向行走, 行人经过 1m 加速至 5km/h,之后再行走 10m 。此时 VUT 以速度 50-80km/h [步长为5km/h] 速度行驶,与行人在 25% 处发生碰撞。在碰撞发生时,测试当时 FCW 的碰撞时间 TTC。
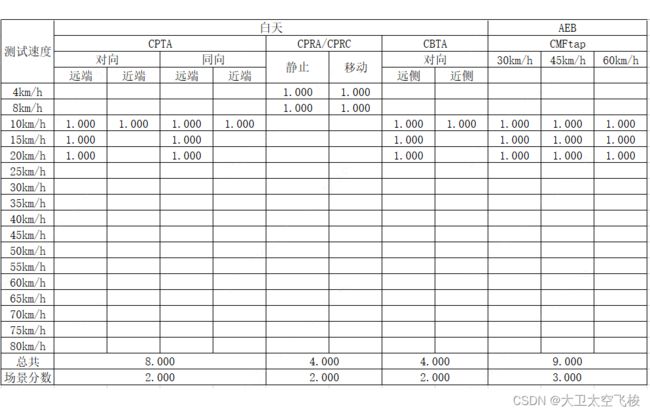
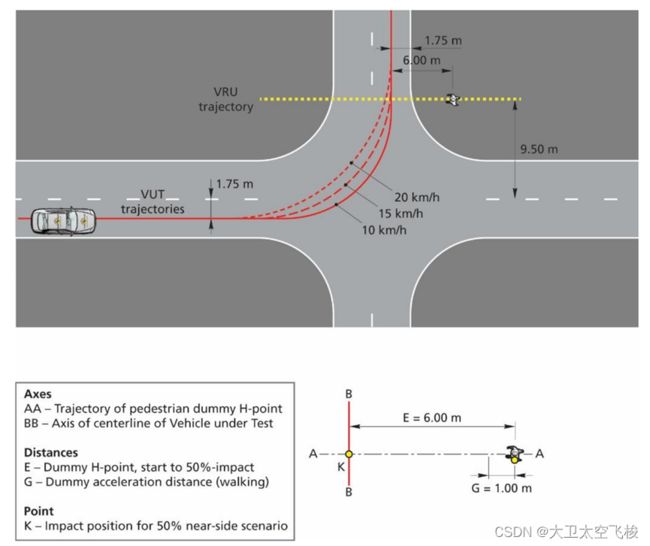
5.1.5 Car-to-Pedestrian Turning Adult CPTA-50
场景1:

CPTA scenario – VUT left turn, pedestrian crossing from farside
测试场景描述如下:
测试车辆 (VUT) 车辆左转经过十字路口,遭遇一名与 VUT 转向前的方向相同的成人行人,而在 VUT 未施加制动时,其前部结构以车辆宽度的 50% 处与行人碰撞。
测试内容描述如下:
在白天的状况下(夜晚要有路灯且开启近光灯),测试车辆 (VUT)远侧有成人行人以相同方向行走, 行人经过 1m 加速至 5km/h,之后再行走 8.5m 。此时 VUT 以速度 10-20km/h [步长为5km/h] 速度穿过十字路口,与行人在 50% 处发生碰撞。在碰撞发生时,测试当时的碰撞速度 Vimpact 是否为 0km/h。
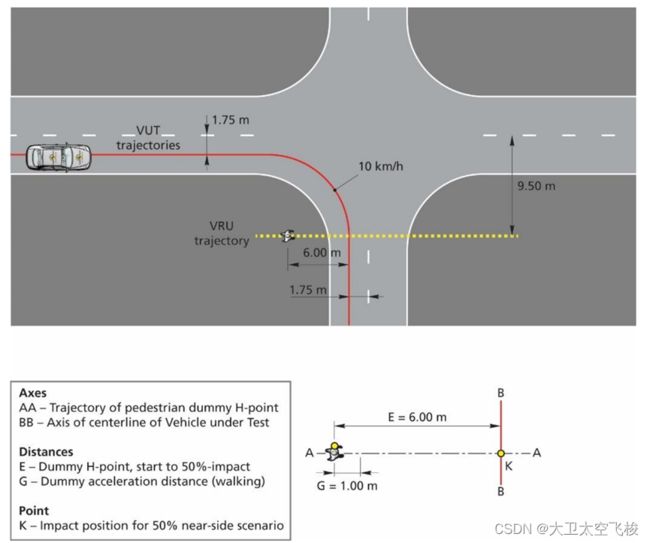
场景2:
CPTA scenario – VUT left turn, pedestrian crossing from nearside
测试场景描述如下:
测试车辆 (VUT) 车辆左转经过十字路口,遭遇一名与 VUT 转向前的方向相反的成人行人,而在 VUT 未施加制动时,其前部结构以车辆宽度的 50% 处与行人碰撞。
测试内容描述如下:
在白天的状况下(夜晚要有路灯且开启近光灯),测试车辆 (VUT)近侧有成人行人以相反方向行走, 行人经过 1m 加速至 5km/h,之后再行走 5m 。此时 VUT 以速度 10-20km/h [步长为5km/h] 速度穿过十字路口,与行人在 50% 处发生碰撞。在碰撞发生时,测试当时的碰撞速度 Vimpact 是否为 0km/h。
场景3:

CPTA scenario – VUT right turn, pedestrian crossing from farside
测试场景描述如下:
测试车辆 (VUT) 车辆右转经过十字路口,遭遇一名与 VUT 转向前的方向相反的成人行人,而在 VUT 未施加制动时,其前部结构以车辆宽度的 50% 处与行人碰撞。
测试内容描述如下:
在白天的状况下(夜晚要有路灯且开启近光灯),测试车辆 (VUT)远侧有成人行人以相反方向行走, 行人经过 1m 加速至 5km/h,之后再行走 8.5m 。此时 VUT 以速度 10-20km/h 转向经过十字路口,与行人在 50% 处发生碰撞。在碰撞发生时,测试当时的碰撞速度 Vimpact 是否为 0km/h。
场景4:
CPTA scenario – VUT right turn, pedestrian crossing from nearside
测试场景描述如下:
测试车辆 (VUT) 车辆右转经过十字路口,遭遇一名与 VUT 转向前的方向相同的成人行人,而在 VUT 未施加制动时,其前部结构以车辆宽度的 50% 处与行人碰撞。
测试内容描述如下:
在白天的状况下(夜晚要有路灯且开启近光灯),测试车辆 (VUT)近侧有成人行人以相同方向行走, 行人经过 1m 加速至 5km/h,之后再行走 5m 。此时 VUT 以速度 10km/h 转向经过十字路口,与行人在 50% 处发生碰撞。在碰撞发生时,测试当时的碰撞速度 Vimpact 是否为 0km/h。
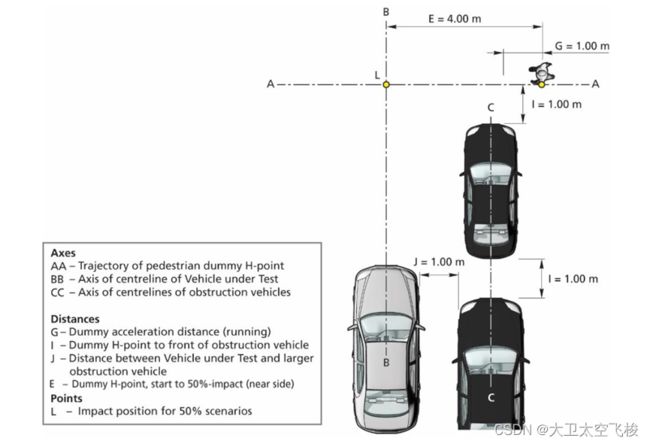
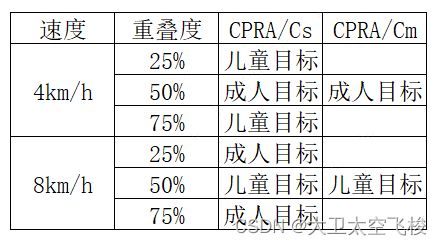
5.1.6 Car-to-Pedestrian Reverse Adult/Child CPRA/CPRC

CPRA/CPRC scenario, Pedestrian from Nearside (left) and Stationary (right)
测试场景 (Stationary) 描述如下:
本测试场景描述了测试车辆(VUT)向后行驶,未施加制动作用的情况下,与后方站立的成人或儿童行人发生碰撞的场景。车辆后部结构会以车辆宽度的 25%、50% 或 75% 撞击行人。该场景主要测试车辆后方的防御能力以及配备的后向自动紧急制动系统(AEB)的反应能力。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 4km/h 和 8km/h 速度后退,与后方静止行人在 25%&50%&75% 处发生碰撞,测试当时的碰撞速度 Vimpact 是否为 0km/h 以及三种重叠度场景是否都通过。
测试场景 (Moving) 描述如下:
测试车辆 (VUT) 车辆向后行驶,遭遇后方左侧穿行的成人或儿童行人,而在 VUT 未施加制动时,其前部结构以车辆宽度的 50% 处与行人碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 4km/h 和 8km/h 速度后退,后方左侧有行人横穿。行人经过 1.5m 加速,速度达到 5km/h,再经过 2.5m 后。此时 VUT 以当时的速度在 50% 处与行人发生碰撞,测试当时的碰撞速度 Vimpact 是否为 0km/h。
被测目标选择
5.2 Car-to-Bicyclist Scenarios C2B 场景
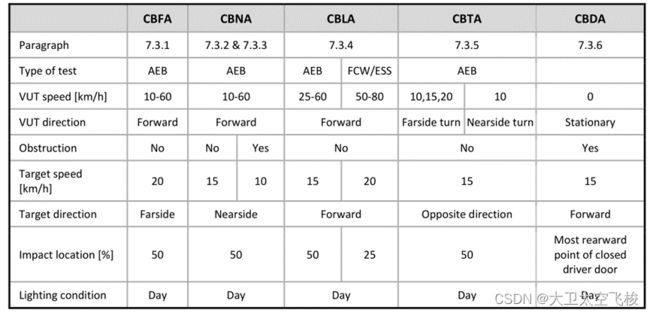
5.2.1 Car-to-Bicyclist Farside Adult CBFA-50

CBFA scenario, Bicyclist from Farside
测试场景描述如下:
测试车辆 (VUT) 向前行驶,遭遇一名骑自行车的人从远侧盲区下横穿其行驶路径。而在 VUT 未施加制动时,其前面结构以车辆宽度的 50% 处与骑行者碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 10-60km/h 速度向前行驶,此时前方盲区内存在与 VUT 横向行驶的骑行者。骑行者通过距离 N 加速至 20km/h 出现在车辆视野内,在行驶 22m 后,与 VUT 其前面结构以车辆宽度的 50% 处发生碰撞。在碰撞发生时,测试 VUT 与骑行者之间的碰撞速度 Vimpact。
5.2.2 Car-to-Bicyclist Nearside Adult CBNA-50

CBNA scenario, Bicyclist from Nearside
测试场景描述如下:
测试车辆 (VUT) 向前行驶,遭遇一名骑自行车的人从近侧盲区下横穿其行驶路径。而在 VUT 未施加制动时,其前面结构以车辆宽度的 50% 处与骑行者碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 10-60km/h 速度向前行驶,此时前方盲区内存在与 VUT 横向行驶的骑行者。骑行者通过距离 C 加速至 15km/h 出现在车辆视野内,在行驶 17m 后,与 VUT 其前面结构以车辆宽度的 50% 处发生碰撞。在碰撞发生时,测试 VUT 与骑行者之间的碰撞速度 Vimpact。
5.2.3 Car-to-Bicyclist Nearside Adult Obstructed CBNAO-50
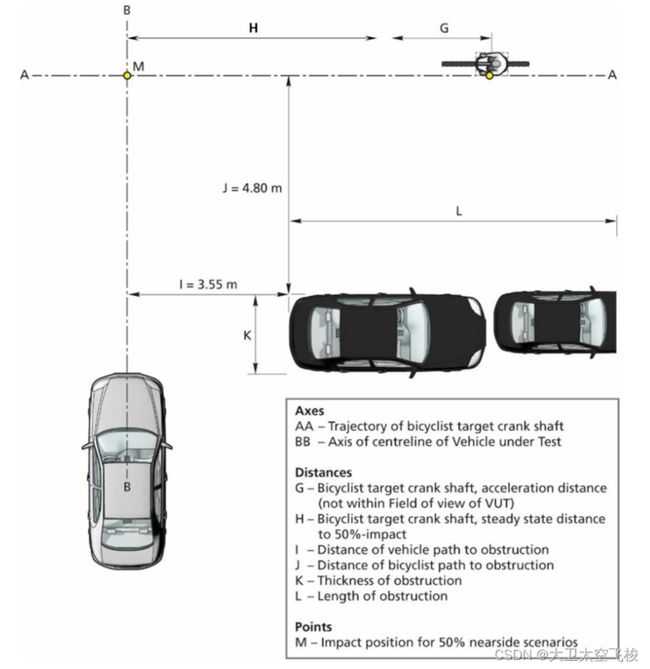
CBNAO scenario, Bicyclist from Nearside (obstructed)
测试场景描述如下:
测试车辆 (VUT) 向前行驶,遭遇一名骑自行车的人从近侧障碍物遮挡下横穿其行驶路径。而在 VUT 未施加制动时,其前面结构以车辆宽度的 50% 处与骑行者碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 10-60km/h 速度向前行驶,此时近侧有障碍物遮挡,存在与 VUT 横向行驶的骑行者。骑行者通过距离 G 加速至 10km/h 出现在车辆视野内,在行驶 H 后,与 VUT 其前面结构以车辆宽度的 50% 处发生碰撞。在碰撞发生时,测试 VUT 与骑行者之间的碰撞速度 Vimpact。
5.2.4 Car-to-Bicyclist Longitudinal Adult CBLA-50%,25%
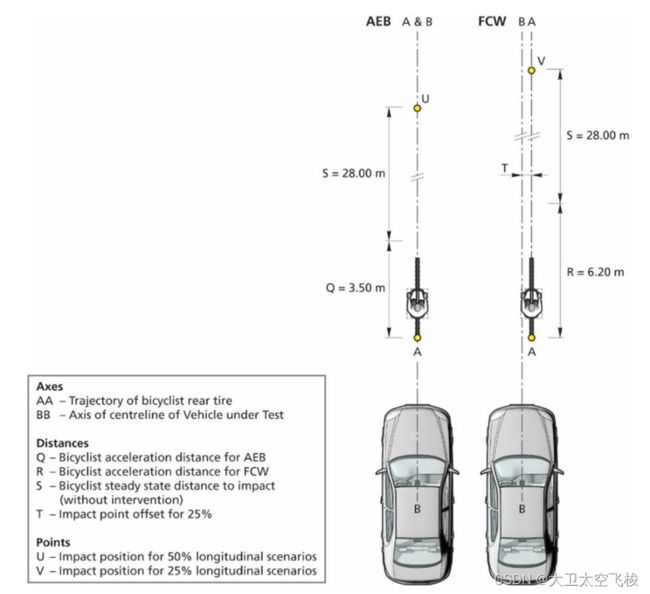
CBLA scenarios, Longitudinal Bicyclist (AEB left & FCW right)
测试场景 (AEB) 描述如下:
测试车辆 (VUT) 向前行驶,遭遇一名与 VUT 同向行驶的骑行者。而在 VUT 未施加制动时,其前面结构以车辆宽度的 50% 处与骑行者碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 25-60km/h 速度向前行驶。前方同向行驶的骑行者通过距离 3.5m 加速至 15km/h,在行驶 28m 后,与 VUT 其前面结构以车辆宽度的 50% 处发生碰撞。在碰撞发生时,测试 VUT 与骑行者之间的碰撞速度 Vimpact。
测试场景 (FCW/ESS) 描述:
测试车辆 (VUT) 向前行驶,遭遇一名与 VUT 同向行驶的骑行者。而在 VUT 未施加制动时,其前面结构以车辆宽度的 25% 处与骑行者碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 50-80km/h 速度向前行驶。前方同向行驶的骑行者通过距离 6.2m 加速至 20km/h,在行驶 28m 后,与 VUT 其前面结构以车辆宽度的 50% 处发生碰撞。在碰撞发生时,测试当时 FCW 的碰撞时间 TTC。
要求 FCW 报警时间 T_FCW≥1.7s,如果 T_FCW<1.7s 则需具备能够避免碰撞的 ESS 或 AES 功能。
5.2.5 Car-to-Bicyclist Turning Adult CBTA
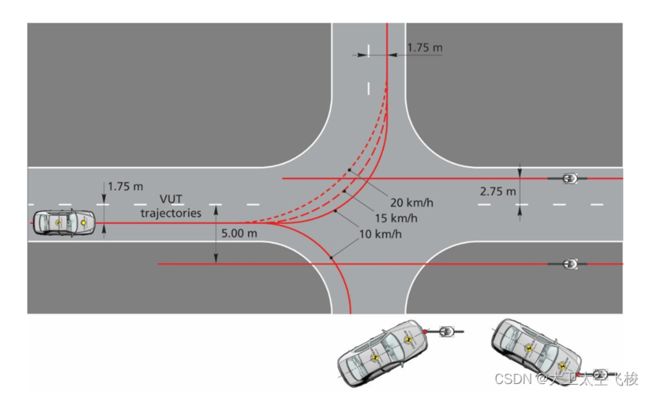
CBTA scenarios, Turning cycling Adult
测试场景 (远侧) 描述如下:
测试车辆 (VUT) 向前转向行驶穿过交叉路口,遭遇到一名与 VUT 转向前方向相反,且正欲横向穿过其行驶路径的骑行者。而在 VUT 未施加制动时,其前面结构以车辆宽度的 50% 处与骑行者碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 10-20km/h 速度向前转向行驶穿过交叉路口。此时有对向骑行者从远侧以 15km/h 速度穿过其路径,行驶一段距离后,与 VUT 其前面结构以车辆宽度的 50% 处发生碰撞。在碰撞发生时,测试被测车辆是否侵入目标车辆路径。
测试场景 (近侧) 描述如下:
测试车辆 (VUT) 向前转向行驶穿过交叉路口,遭遇到一名与 VUT 转向前方向相反,且正欲横向穿过其行驶路径的骑行者。而在 VUT 未施加制动时,其前面结构以车辆宽度的 50% 处与骑行者碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 10km/h 速度向前转向行驶穿过交叉路口。此时有对向骑行者从近侧以 15km/h 速度穿过其路径,行驶一段距离后,与 VUT 其前面结构以车辆宽度的 50% 处发生碰撞。在碰撞发生时,测试被测车辆是否侵入目标车辆路径。
每个测试场景需要完全避免碰撞才能得分。
5.2.6 Car-to-Bicyclist Dooring CBDA

CBDA scenarios, Dooring cycling Adult
测试场景描述如下:
骑行者行驶于停止的测试车辆 (VUT) 旁边,与 VUT 车门发生碰撞。
备注:VUT 光学报警需在对应的前侧窗的视野中,所有测试应在系统关闭且驾驶员处于未系安全带状态后 60s 内(从 2025 年起为 180s)进行。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 处于静止状态,后方 2m 处存在另一静止车辆,两车外侧平齐。此时在后方距离外侧轴线 1m 处,骑行者以 15km/h 向前行驶。在骑行者行驶至 D 点处,驾驶员开始打开车门操作,在骑行者继续行驶 8m 后,于关闭后车门的最后点 C 处发生碰撞。在碰撞发生时,测试综合时间 TTC。
5.3 Car-to-Motorcyclis C2M 场景

5.3.1 Car-to-Motorcyclist Rear stationary

CMRs scenario
测试场景(AEB) 描述如下:
测试车辆 (VUT) 向前行驶,遭遇前方 0 速度的摩托车,而在 VUT 未施加制动时,其前面结构以车辆宽度的 50% 处与摩托车碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以速度 10km/h 速度向前行驶,前方存在静止的摩托车手,行驶一段距离后,在车辆前部结构 50% 处发生碰撞。在碰撞发生时,测试 VUT 与摩托车间的碰撞速度 Vimpact。
测试场景 (FCW) 描述如下:
测试车辆 (VUT) 向前行驶,遭遇前方 0 速度的摩托车,而在 VUT 未施加制动时,其前面结构以车辆宽度的 50% 处与摩托车碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以速度 30-60km/h 速度向前行驶,前方存在静止的摩托车手,行驶一段距离后,在车辆前部结构 50% 处发生碰撞。在碰撞发生时,测试 VUT 与摩托车间的碰撞速度 Vimpact。
5.3.2 Car-to-Motorcyclist Rear braking
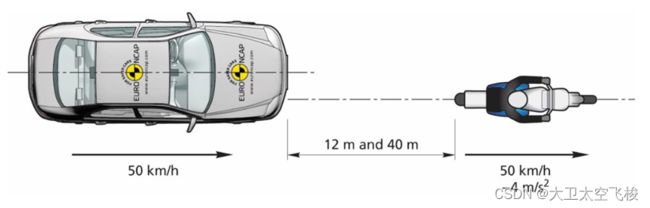
CMRb scenario
测试场景 (AEB/FCW) 描述如下:
测试车辆 (VUT) 向前行驶,遭遇前方恒定速度行驶的摩托车,之后摩托车减速。而在 VUT 未施加制动时,在其前部结构 25% 处与摩托车后部发生碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以速度 50km/h 速度向前行驶,前方 12m&40m 处存在摩托车手以 50km/h 速度同向行驶,之后摩托车以 -4m/s^2 的减速度减速,于 VUT 前部结构 25% 处发生碰撞。在碰撞发生时,测试 VUT 与摩托车间的碰撞速度 Vimpact。
5.3.3 Car-to-Motorcyclist Front turn across path
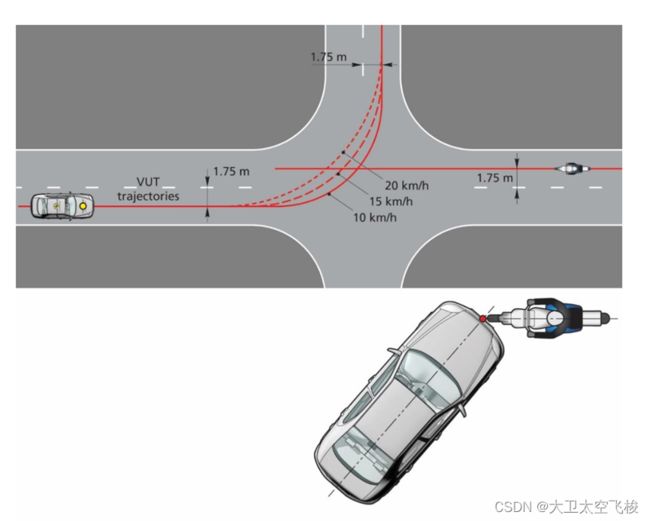
CMFtap scenario VUT and EMT paths
测试场景描述如下:
测试车辆 (VUT) 左向转弯向前行驶穿过交叉路口,遭遇前方恒定速度行驶的摩托车迎面驶来。而在 VUT 未施加制动时,在其前部结构 50% 处与摩托车前部发生碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以速度 10-20km/h 速度左向转弯向前行驶穿过交叉路口。前方摩托车以 30-60km/h 速度迎面驶来,经过一段时间后,于 VUT 前部结构 50% 处发生碰撞。在碰撞发生时,测试 VUT 是否侵入目标摩托车路径。
5.3.4 Car-to-Motorcycle LSS Test Scenarios
略
5.3.5 Car-to-Motorcyclist oncoming

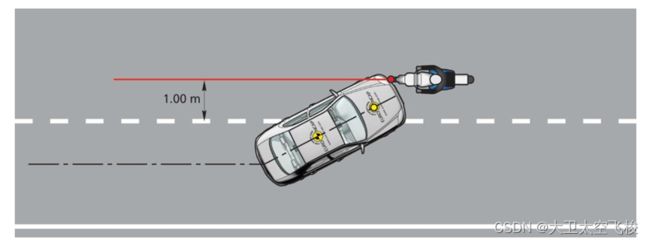
测试场景描述如下:
测试车辆 (VUT) 车辆偏离车道,遭遇相邻车道上以相反方向行驶的摩托车。而在 VUT 未施加制动时,在其前部结构 10% 处与摩托车前部发生碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 72km/h 速度,以 0.2-0.6m/s 横向速度偏离车道。前方相邻车道存在 72km/h 速度的摩托车迎面驶来,其中心轴线距离车道标线内侧 1m。经过一段时间后,与 VUT 前部结构 50% 处发生碰撞。在碰撞发生时,测试 VUT 是否与目标摩托车发生碰撞。
避免碰撞才能得分。
5.3.6 Car-to-Motorcyclist overtaking
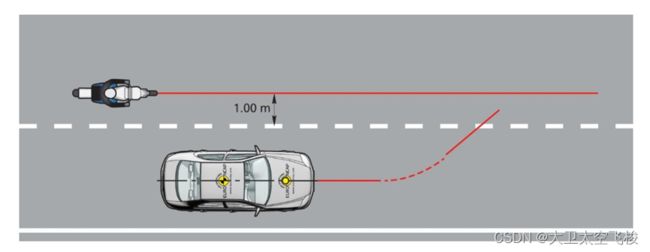
测试场景(无意识偏离)描述如下:
测试车辆 (VUT) 车辆偏离车道,遭遇相邻车道上以同向行驶的摩托车。而在 VUT 未施加制动时与摩托车前部发生碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 50km/h 和 72km/h 速度,以 0.2-0.6m/s 横向速度偏离车道。临侧车道存在车速 60km/h 和 80km/h的摩托车同向行驶,其中心轴线距离车道标线内侧 1m。经过一段时间后,摩托车前轮与 VUT 后轮发生碰撞。在碰撞发生时,测试 VUT 是否与目标摩托车发生碰撞。
避免碰撞才能得分。
6. 评测方法及评测标准 — SA
6.1 评测内容

6.2 评测方法

6.3 评分标准
对于 CCRs(AEB 和 FCW)、CCRb、CCFhos、CCFhol 和 CCCscp 测试使用的评估标准是 Vimpact。对于 CCRm 测试,使用的评估标准为 Vrel_impact。对于 CCFtap 测试,评估标准是避免碰撞。
各场景计分标准同 VRU 评分标准类似,具体规则请参见原文。
7. C2C 场景详细解析
7.1 Car-to-Car Rear stationary CCRs


测试场景描述如下:
测试车辆 (VUT) 向前行驶,与前面静止车辆 GVT 发生碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 X 速度向前行驶,与前车 GVT 重叠 -50% - 50% 发生碰撞。在碰撞发生时,测试 VUT 与 GVT 的碰撞速度 Vimpact。
其中 X 范围与 AEB 和 FCW 的配置有关:
若车辆只装配 FCW,则 X 为 30-80km/h;
若车辆只装配 AEB,则 X 为 10-80km/h;
若车辆 AEB 和 FCW 均装配,则 10-50km/h 用于 AEB 测试,30-80km/h 用于 FCW 测试。
7.2 Car-to-Car Rear moving CCRm


测试场景描述如下:
测试车辆 (VUT) 向前行驶,与前方存在以恒定速度行驶的汽车 GVT 发生碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 X 速度向前行驶,前方存在车辆 GVT 以 20km/h 速度匀速行驶。与前车 GVT 重叠 -50% — 50% 发生碰撞,在碰撞发生时,测试 VUT 与 GVT 的碰撞速度 Vimpact。
其中 X 范围与 AEB 和 FCW 的配置有关:
若车辆只装配 FCW,则 X 为 50-80km/h;
若车辆只装配 AEB,则 X 为 30-80km/h;
若车辆 AEB 和 FCW 均装配,则 30-50km/h 用于 AEB 测试,50-80km/h 用于 FCW 测试。
7.3 Car-to-Car Rear Braking


测试场景描述如下:
测试车辆 (VUT) 向前行驶,与前方以恒定速度,之后减速行驶的汽车 GVT 发生碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以 50km/h 速度向前行驶,前方 12m、40m 处存在车辆以 50km/h 速度匀速行驶,之后以-2m/s^2、-6m/s^2 减速度行驶。两车发生碰撞时,测试 12 种情况下 VUT 与 GVT 的碰撞速度 Vimpact。
7.4 Car-to-Car Front Turn-Across-Path CCFtap

测试场景描述如下:
测试车辆 (VUT) 左向转弯向前行驶穿过交叉路口,遭遇前方恒定速度行驶的车辆 GVT 迎面驶来。而在 VUT 未施加制动时,在其前部结构 50% 处与 GVT 前部发生碰撞。
测试内容描述如下:
在白天的状况下,测试车辆 (VUT) 以速度 10-20km/h 速度左向转弯向前行驶穿过交叉路口。前方车辆 GVT 以 30-60km/h 速度迎面驶来,经过一段时间后,与 VUT 前部结构 50% 处发生碰撞。在碰撞发生时,测试被测车辆是否侵入目标车辆路径。
7.5 Car-to-Car Crossing Straight Crossing Path CCCscp

测试场景描述如下:
测试车辆 (VUT) 向前行驶直穿交叉路口,遭遇横向行驶穿过交叉口的车辆 GVT。GVT 先前以>1m/s^2 加速度行驶,之后稳定在 0.5m/s^2的状态。经过一段时间后,在 VUT 未施加制动时,在其前部结构 50% 处与目标车辆 GVT 车长 25% 处发生碰撞。
测试内容描述如下:
1.测试车辆(VUT) 以 20-60km/h 速度向前行驶,此时垂直路径上存在目标车辆 GVT 以 20-60km/h 速度通过交叉路口。经过一段时间后,VUT 车辆前部车宽 50% 处与目标车辆 GVT 车长 25% 处发生碰撞。在碰撞发生时,测试当时的碰撞速度 Vimpact。
2.垂直路径上存在目标车辆 GVT 以 20-60km/h 速度通过交叉路。VUT 距离目标车辆轴线 2.9m,VUT 由停止到启动,在 1-1.5s 内达到 1.5±0.25m/s^2 的纵向加速度,在结束时的加速度仍大于 1m/s^2,在行驶 2.9m 后两车发生碰撞。
相同场景下,若 AEB 可避免,则 FCW 不用再进行测试,自动通过。
7.6 Car-to-Car Front Head On CCFhos
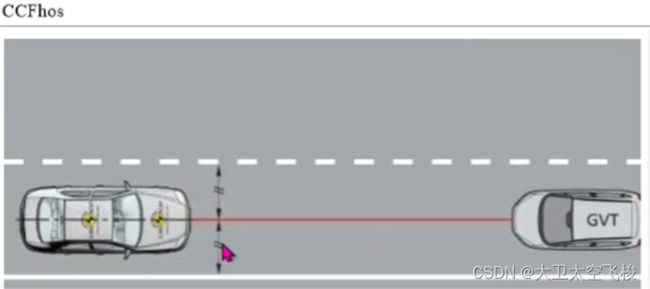
AEB CCFhos/CCFhol
测试场景描述如下:
测试车辆 (VUT) 向前行驶,并与另一辆反向行驶的目标车辆 GVT 发生碰撞。GVT 已漂移至与 VUT 相同的车道,两辆车前部发生碰撞。
测试内容描述如下:
测试车辆 (VUT) 以 50km/h、70km/h 速度向前行驶,前方存在车辆 GVT 以 50km/h、70km/h 速度迎面驶来,经过一段时间后发生碰撞。在碰撞发生时,测试 VUT 速度的减少量。
7.7 Car-to-Front Head On CCFhol

AEB CCFhos/CCFhol
测试场景描述如下:
测试车辆 (VUT)在规定车道内沿直线行驶,并与另一辆反向行驶的目标车辆 GVT 发生碰撞。该目标车辆 GVT 故意驶入被测车辆的车道,试图超车。VUT 车辆的前部结构撞击目标车辆 GVT 的前部结构。
测试内容描述如下:
测试车辆 (VUT) 以 50km/h、70km/h 速度向前行驶,前方临侧车道存在对向目标车辆 GVT 以 50km/h、70km/h 速度迎面驶来,经过一段时间后发生碰撞。在碰撞发生时,测试 VUT 速度的减少量。
测试内容:
测试车辆 (VUT) 以 50km/h、70km/h 速度向前行驶,前方临侧车道存在对向目标车辆 GVT 以 50km/h、70km/h 速度迎面驶来,距第二车辆 SOV 距离 13.9m、19.4m 时,变道超车,变道距离 44m、60m,横向最大加速度 1.5m/s^2,变道完成后,碰撞时间剩余 1.5s,之后 VUT、GVT 两车发生碰撞。在碰撞发生时,测试 VUT 速度的减少量。
8. 名词释义
Autonomous Emergency Braking (AEB) – braking that is applied automatically by the vehicle in response to the detection of a likely collision to reduce the vehicle speed and potentially avoid the collision.
Forward Collision Warning (FCW) – an audio-visual warning that is provided automatically by the vehicle in response the detection of a likely collision to alert the driver.
Dynamic Brake Support (DBS) – a system that further amplifies the driver braking demand in response to the detection of a likely collision to achieve a greater deceleration than would otherwise be achieved for the braking demand in normal driving conditions.
Autonomous Emergency Steering (AES) –steering that is applied automatically by the vehicle in response to the detection of a likely collision to steer the vehicle around the vehicle in front to avoid the collision.
Emergency Steering Support (ESS) – a system that supports the driver steering input in response to the detection of a likely collision to alter the vehicle path and potentially avoid a collision.
Car-to-Bicyclist Dooring Adult (CBDA) – a collision between the vehicle’s door and a bicyclist traveling alongside the parked vehicle.
Car-to-Pedestrian Farside Adult 50% (CPFA-50) – a collision in which a vehicle travelsforwards towards an adult pedestrian crossing its path running from the farside and the frontal structure of the vehicle strikes the pedestrian at 50% of the vehicle's width when no braking action is applied.
Car-to-Pedestrian Nearside Adult 25% (CPNA-25) – a collision in which a vehicle travels forwards towards an adult pedestrian crossing its path walking from the nearside and the frontal structure of the vehicle strikes the pedestrian at 25% of the vehicle’s width when no braking action is applied.
Car-to-Pedestrian Adult 75% (CPNA-75) – a collision in which a vehicle travels forwards towards an adult pedestrian crossing its path walking from the nearside and the frontal structure of the vehicle strikes the pedestrian at 75% of the vehicle’s width when no braking action is applied.
Car-to-Pedestrian Nearside Child Obstructed 50% (CPNCO-50) – a collision in which a vehicle travels forwards towards a child pedestrian crossing its path running from behind and obstruction from the nearside and the frontal structure of the vehicle strikes the pedestrian at 50% of the vehicle's width when no braking action is applied.
Car-to-Pedestrian Longitudinal Adult 25% (CPLA-25) – a collision in which a vehicle travels forwards towards an adult pedestrian walking in the same direction in front of the vehicle where the vehicle strikes the pedestrian at 25% of the vehicle’s width when no braking action is applied, or an evasive steering action is initiated after an FCW.
Car-to-Pedestrian Longitudinal Adult 50% (CPLA-50) – a collision in which a vehicle travels forwards towards an adult pedestrian walking in the same direction in front of the vehicle where the vehicle strikes the pedestrian at 50% of the vehicle’s width when no braking action is applied.
Car-to-Pedestrian Turning Adult 50% (CPTA-50) – a collision in which a vehicle turns towards an adult pedestrian crossing its path, walking across a junction (in either the same and opposite direction as the VUT, before the VUT made the turn) and the frontal structure of the vehicle strikes the pedestrian at 50% of the vehicle's width when no braking action is applied.
Car-to-Pedestrian Reverse Adult/Child moving 50% (CPRA/Cm-50) – a collision in which a vehicle travels rearwards towards an adult or child pedestrian crossing its path walking from the nearside and the rear structure of the vehicle strikes the pedestrian at 50% of the vehicle’s width when no braking action is applied.
Car-to-Pedestrian Reverse Adult/Child stationary (CPRA/Cs) – a collision in which a vehicle travels rearwards towards an adult or child pedestrian standing still and the rear structure of the vehicle strikes the pedestrian at 25, 50 or 75% of the vehicle’s width when no braking action is applied.
Car-to-Bicyclist Nearside Adult 50% (CBNA-50) – a collision in which a vehicle travels forwards towards a bicyclist crossing its path cycling from the nearside and the frontal structure of the vehicle strikes the bicyclist when no braking action is applied.
Car-to-Bicyclist Nearside Adult Obstructed 50% (CBNAO-50) – a collision in which a vehicle travels forwards towards a bicyclist crossing its path cycling from the nearside from behind an obstruction and the frontal structure of the vehicle strikes the bicyclist at 50% of the vehicle's width when no braking action is applied.
Car-to-Bicyclist Farside Adult 50% (CBFA-50) – a collision in which a vehicle travels forwards towards a bicyclist crossing its path cycling from the farside and the frontal structure of the vehicle strikes the bicyclist at 50% of the vehicle's width when no braking action is applied.
Car-to-Bicyclist Longitudinal Adult 25% (CBLA-25) – a collision in which a vehicle travels forwards towards a bicyclist cycling in the same direction in front of the vehicle where the vehicle would strike the cyclist at 25% of the vehicle’s width when no braking action is applied or an evasive steering action is initiated after an FCW.
Car-to-Bicyclist Longitudinal Adult 50% (CBLA-50) – a collision in which a vehicle travels forwards towards a bicyclist cycling in the same direction in front of the vehicle where the vehicle would strike the cyclist at 50% of the vehicle’s width when no braking action is applied.
Car-to-Bicyclist Turning Adult 50% (CBTA-50) – a collision in which a vehicle turns towards a bicyclist crossing its path, walking across a junction (in either the same and opposite direction as the VUT, before the VUT made the turn) and the frontal structure of the vehicle strikes the pedestrian at 50% of the vehicle's width when no braking action is applied.
Car-to-Motorcyclist Rear Stationary (CMRs) – a collision in which a vehicle travels forwards towards a motorcyclist and the front structure of the vehicle strikes the rear of the motorcycle.
Car-to-Motorcyclist Rear Braking (CMRb) – a collision in which a vehicle travels forwards towards a motorcyclist that is travelling at constant speed and then decelerates, and the frontal structure of the vehicle strikes the rear of the motorcycle.
Car-to-Motorcyclist Front Turn Across Path (CMFtap) – a collision in which a vehicle turns across the path of an oncoming motorcyclist travelling at a constant speed, and the frontal structure of the vehicle strikes the front of the motorcycle.
Car-to-Motorcyclist Oncoming (CMoncoming) – a collision in which a vehicle drifts out of lane and into the path of a motorcyclist travelling in the opposite direction in the adjacent lane.
Car-to-Motorcyclist Overtaking (CMovertaking) – a collision in which a vehicle drifts out of lane and into the path of a motorcyclist travelling in the same direction in the adjacent lane.
Car-to-Car Rear stationary (CCRs) – a collision in which a vehicle travels forwards towards another stationary vehicle and the frontal structure of the vehicle strikes the rear structure of the other.
Car-to-Car Rear moving (CCRm) – a collision in which a vehicle travels forwards towards another vehicle that is travelling at constant speed and the frontal structure of the vehicle strikes the rear structure of the other.
Car-to-Car Rear braking (CCRb) – a collision in which a vehicle travels forwards towards another vehicle that is travelling at constant speed and then decelerates, and the frontal structure of the vehicle strikes the rear structure of the other.
Car-to-Car Front Turn-Across-Path (CCFtap) – a collision in which a vehicle turns across the path of an oncoming vehicle travelling at constant speed, and the frontal structure of the vehicle strikes the front structure of the other.
Time To Collision (TTC) – means the remaining time before the VUT strikes the GVT,assuming that the VUT and GVT would continue to travel with the speed it is travelling.
Distance To Lane Edge (DTLE) – means the remaining lateral distance (perpendicular to the Lane Edge) between the Lane Edge and most outer edge of the tyre, before the VUT crosses Lane Edge, assuming that the VUT would continue to travel with the same lateral velocity towards it.
Vehicle under test (VUT) – means the vehicle tested according to this protocol with a pre-crash collision mitigation or avoidance system on board.
Global Vehicle Target (GVT) – means the vehicle target used in this protocol as defined in TB025 - Global Vehicle Target specification for Euro NCAP v1.0.
Vrel_test – means the relative speed between the VUT and the EVT by subtracting the velocity of the EVT from that of the VUT at the start of test.
Vimpact – means the speed at which the VUT hits the EVT.
Vrel_impact – means the relative speed at which the VUT hits the EVT by subtracting the velocity of the EVT from Vimpact at the time of collision.
……
9. 参考文献
euro-ncap-assessment-protocol-vru-v111
euro-ncap-assessment-protocol-sa-collision-avoidance-v100
DMS_euro-ncap-assessment-protocol-sa-v91
euro-ncap-aeb-lss-vru-test-protocol-v41
euro-ncap-aeb-c2c-test-protocol-v303
LSS_euro-ncap-lss-test-protocol-v302
euro-ncap-aeb-vru-test-protocol-v304
法规标准-E-NCAP评测标准解析(2023版)_encap_林沐栖的博客-CSDN博客
E-NCAP 2023主动安全之VRU - 知乎