11-10 前向碰撞预警 FCW 算法原理及系统设计
本设计遵循 ISO 15623/22839-2013、GB_T 33577-2017、E-NCAP-2023 标准。
1. FCW 背景概述
前向碰撞预警系统 (Forward Collision Warning,FCW) 是一种汽车主动安全技术。汽车主动安全技术是指车辆配备先进的电子和传感器设备,通过精准的监控、识别和主动干预等手段,提高汽车行驶安全、降低事故风险的技术。前向碰撞预警系统 FCW 通过雷达或摄像头等传感器技术,实时监测前方道路和车辆的状况,预测可能发生的碰撞危险,同时为驾驶员提供预警以避免交通事故的发生,从而提高汽车的主动安全性能。
相关统计数据表明,由于驾驶员的主观因素导致的交通事故占比最高,若在交通事故发生前的 1.5s 给驾驶员发出预警,可避免 90% 的碰撞事故,大大减少交通事故的伤害。 2017 年 3 月7 日,交通运输部组织制定了交通运输行业标准《营运客车安全技术条件》,并于2017 年 4 月 1 日起正式实施,要求 9 米以上的营运客车要求必须具备车道偏离预警系统 (Lane Departure Warning,LDW)和前向碰撞预警系统 FCW,并给出了 13 个月的过渡期。交通部此项强制要求是国内首个强制安装 ADAS 系统的案例,由此可见,LDW 和 FCW 是 ADAS 的必备基础功能。
其实,对汽车防碰撞系统的研究源远流长,早在 20 世纪 70 年代,日本就开始进行了汽车碰撞系统的研究,1999 年,本田、丰田、日产三大车厂各自开始开发自己的前车碰撞预警系统,2003 年在美版雅阁中本田首次安装了自己的碰撞缓解制动系统(CMBS),可以看做是现在 FCW 系统的前身。CMBS 系统的工作原理是:当毫米波雷达探测到前方可能有碰撞危险时,便以警告的方式提醒驾驶员,如果继续接近,当系统判断将要追尾时,则会采取自动制动措施。而日本另一大汽车厂商丰田的预碰撞安全系统最早是在 2003 年安装在雷克萨斯 LX 和 RX 车系上,同样也是采取了毫米波雷达作为传感器。欧美对此的研究也不落后,作为全球安全领域的领军者——沃尔沃在 2006 年的 S80上首次安装了碰撞预警系统,通过毫米波雷达来检测车距,发现危险时会提示驾驶员立即制动,同时会推动制动片接近制动盘,以便为驾驶员制动提供最快的反应速度,2007 年系统升级后,沃尔沃便增加了自动制动的功能。现在,FCW 功能已经成为 ADAS 系统常见的标准配置。
1.1 FCW 实现原理
首先,利用传感器获取前方道路信息,对前方车辆进行识别和跟踪。如果有车辆被识别出来,就会测量前方车距。同时,结合车速估计,利用安全车距预警模型判断是否存在追尾风险。一旦存在追尾危险,系统会根据预警规则及时给予驾驶员主动预警。FCW 系统主要的功能包括:
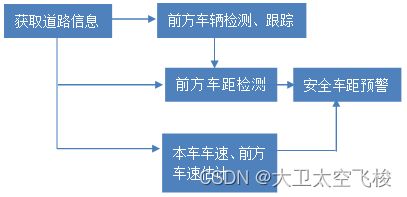
具体来说,我们可以将以上过程分为三个部分。
FCW 指的是前方碰撞预警系统(Forward Collision Warning System),它是一种车辆主动安全技术,可以实时监测前方道路和车辆的状况,预测可能发生的碰撞危险,为驾驶员提供预警和辅助制动等措施,从而避免交通事故的发生。FCW 系统主要的功能包括:
1. 前方车辆探测:通过雷达或摄像头等传感器,实时监测前方车辆和道路状况。
2. 碰撞预测:分析前方车辆行驶速度、方向变化等数据,预测是否存在前方碰撞的风险。
3. 驾驶员预警:当系统检测到可能存在交通事故风险时,会发出视觉、声音、震动等多种方式的警告,提醒驾驶员及时采取措施。
当前 FCW 一般和 AEB 功能结合使用,所以有些厂家 FCW 还包括以下功能:
4. 自动制动:如果驾驶员无法及时响应警告并采取避让措施,FCW 系统会自动进行制动操作,减少碰撞危险。
1.2 前方车辆识别
车辆识别是前提,可以采用的传感器有单目视觉、立体视觉、毫米波雷达以及多传感器融合。目前,基于单目视觉灰度图像进行车辆识别的研究最为广泛,所涉及的算法也较多。车辆检测一般都是依靠车辆特征信息,如车辆形状、车高与车宽的比例等作为检测车辆边缘的约束条件,对图像进行边缘增强处理后获得一些包含车辆信息的水平和垂直边缘,从而对车辆进行检测。
使用单目摄像头的算法简单、计算的实时性强,但单目视觉方案容易受到光照、阴影等外界环境因素的影响,使其可靠性下降。立体视觉是近年来兴起的另一路径,直接模拟了人类视觉处理景物的方式,通过从多个视点观察同一景物,以获取在不同视角下的感知图像,现有的立体视觉技术还不太成熟,研究热度远不如单目视觉。另外,为了突破单一传感器的局限性,采用多传感器信息融合技术也是当前研究的主流,常见的有视觉与激光传感器的融合以及视觉与毫米波雷达传感器的融合,多传感器的缺点除了成本高昂外,计算较为复杂造成实时性差也是当前面临的主要困难。
与传统的车辆识别技术相比,L4 级别车辆识别需要满足更高的准确性和可靠性要求,因此需要使用更为先进的算法和更高精度的传感器。同时,为了避免误判和漏判,需要结合其他传感器和数据源进行交叉验证和综合分析,从而提高车辆识别的准确度和鲁棒性,以确保自动驾驶的安全性和可靠性。

来源:汽车安全辅助驾驶技术
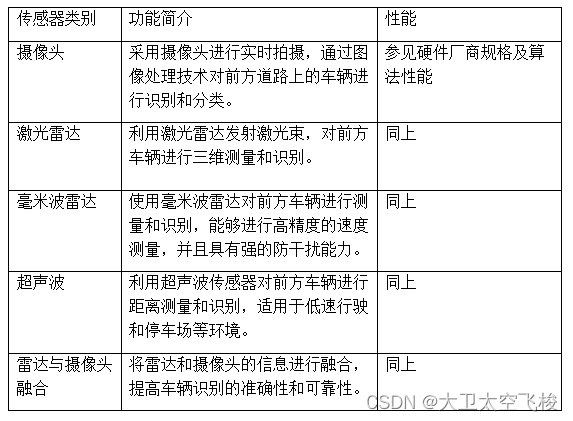
1.2.1 用于车辆检测的主流传感器
目前有些厂商增加了夜视辅助设备,但主要还是以下几种:
1.2.2 当前主流的雷达与摄像头融合技术
- 目标跟踪算法:通过对目标的识别和跟踪,实现对道路上各种车辆、行人等交通参与者的监测和预警。目前常用的目标跟踪算法包括基于卡尔曼滤波的多目标跟踪算法、基于神经网络的目标检测和跟踪算法等。
- 特征匹配算法:该算法将摄像头和雷达传感器获取的数据进行特征提取,并将特征进行匹配,从而实现对车辆、行人等目标的高精度识别。常用的特征匹配算法包括基于 SIFT、SURF、ORB 等特征点的匹配算法。
- 多传感器数据融合算法:该算法主要是将多种传感器获取的数据进行集成,结合物体运动模型进行多源信息的融合和分析,从而建立更加准确的目标模型。常用的多传感器数据融合算法包括卡尔曼滤波、粒子滤波等。
- 深度学习算法:随着深度学习的兴起,该领域也涌现出了许多应用于雷达与摄像头融合技术中的深度学习算法。例如,目标检测算法、多目标跟踪算法等。
1.2.3 当前主流的目标检测算法
- R-CNN:Region-based Convolutional Neural Network(区域卷积神经网络)是深度学习中目前应用最为广泛的目标检测算法。它首先通过 Selective Search 等方法提取出图像中可能包含目标的区域,然后对这些区域进行卷积神经网络的处理,从而实现目标的检测。
- Fast R-CNN:Fast R-CNN 是在 R-CNN 的基础上进行优化得到的一种算法。它将 R-CNN 中的提取区域和卷积神经网络的处理过程合并成一个步骤,从而实现目标检测的加速。
- Faster R-CNN:Faster R-CNN 是在 Fast R-CNN 的基础上进一步优化得到的一种算法。它使用了一种叫做 RPN 的网络结构,可以自动产生大量可能包含目标的区域,从而省去了Selective Search这一步骤,提高了检测速度。
- YOLO:You Only Look Once(你只需要看一次)是一种基于卷积神经网络的实时目标检测算法。它将图像分成 SxS 个网格,每个网格预测出目标的类别、置信度和位置信息,从而实现目标检测和分类的同时进行。
- SSD:Single Shot MultiBox Detector(单次检测多盒子)是一种基于卷积神经网络的快速目标检测算法。它利用了多种不同大小和比例的卷积层,从而在保持较高精度的同时提高了检测速度。
1.3 前方车辆跟踪与车距检测
1.3.1 当前主流车辆跟踪与车距检测方案
车辆跟踪与车距测量是 FCW 系统的重要组成部分,超声波、毫米波、激光雷达、视觉摄像头都可以实现。超声波测距原理简单、成本最低,但其测距精准性受室外温度影响大,衰减快,因此目前只适合短距离测距,主要用在倒车雷达上。实际应用中,常用的是毫米波雷达和视觉方案。
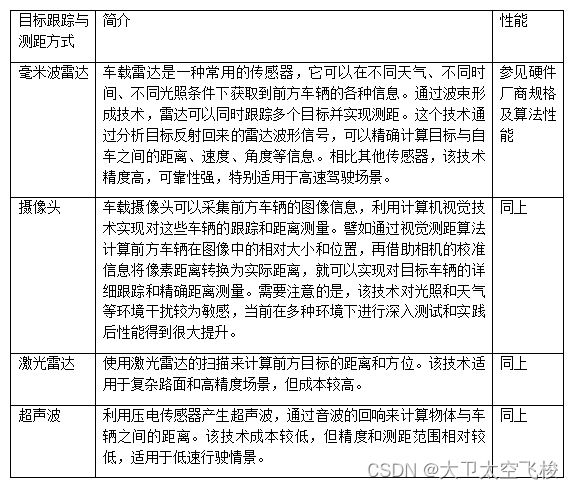
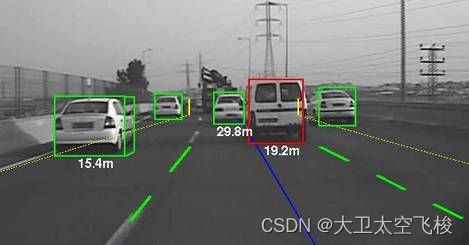
通对于毫米波雷达,视觉测距所需的算法比较复杂,通常有单目视觉和双目视觉两种。单目视觉采用摄像机的焦距和事先确定的参数来估算车距,而双目视觉测距是利用视差的原理,通过对两幅图像进行计算机分析和处理,确定物体的三维坐标,可采用公垂线中点法计算出距离。鉴于视觉技术采集的信息量丰富,以及目前图像处理技术的巨大进步和计算能力已经能够保证图像处理实时性要求,价格低廉的视觉方案成为最理想的选择。如下图所示,对前方车辆的跟踪和测距都是动态进行的,如果前方车辆突然变道超车,FCW 必须马上将跟踪车辆切换的新的目标上。
1.3.2 当前主流的多目标跟踪算法
- Kalman 滤波器:一种常用的单目标跟踪算法,可以实时估计目标的位置、速度和加速度等状态变量。
- Camshift 算法:基于颜色直方图的自适应目标跟踪算法,可以适应目标形变和旋转等因素的影响。
- Meanshift 算法:一种迭代最优化算法,可以自适应地搜索颜色直方图中的最大峰值,用于目标跟踪。
- Particle Filter 算法:一种基于贝叶斯滤波的算法,可以对目标状态进行估计和跟踪。
- IOU Tracker 算法:一种基于 IOU(Intersection over Union,重叠率)的目标跟踪算法,可以适应目标交叉、缺失和复现等情况。
- Deep SORT 算法:结合卷积神经网络和 Kalman 滤波器的目标跟踪算法,可以实现高精度和高速度的多目标跟踪。Deep SORT(Deep Learning for Object Tracking with Object Re-Identification)是一种基于深度学习的多目标跟踪算法,它能够通过多帧目标检测结果,实现对目标轨迹的连续跟踪。Deep SORT 在SORT(Simple Online Real-Time Tracking)算法的基础上,加入了深度学习技术,可以更准确地解决多目标跟踪中的遮挡和目标外观变化等问题。Deep SORT 使用卷积神经网络(CNN)来学习目标的外观特征,并将这些特征用于目标重识别(object re-identification)任务。对于每个目标轨迹,Deep SORT 维护一个运动模型和一个目标外观特征模型,在新的帧里,根据这两个模型将目标轨迹与检测到的目标进行匹配,同时根据检测框的位置和尺寸进行滤波处理,最终输出多个目标轨迹。相比传统的多目标跟踪算法,Deep SORT 具有更准确的目标识别和轨迹预测能力,能够处理更复杂的场景和遮挡情况,在自动驾驶、安防监控等领域具有广泛的应用。
- MOTDT 算法:基于检测和跟踪的框架,可以对多目标进行实时检测和跟踪,并实现长时间的目标跟踪。
1.4 安全车距预警模型
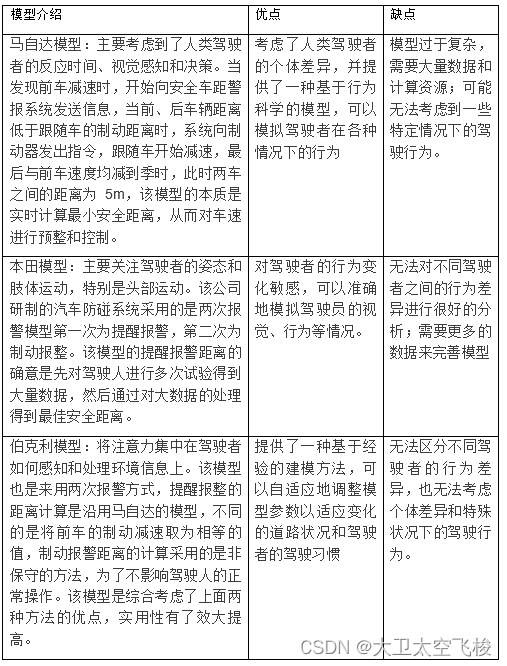
在模型设计上,马自达模型、本田模型以及伯克利模型是比较经典的安全车距模型,后续的很多模型都是在其基础上进行改良。
2. FCW 算法设计
ADAS 的基础与核心是环境感知,基于环境感知的结果进行不同的算法设计就可以实现一系列的ADAS 功能,本文将介绍前方碰撞预警 FCW 的算法设计。
2.1 FCW 算法功能定义
FCW 算法的功能定义如下:
1. 设计使用工况:自车速度限制在 30km/h~160km/h ,主要工况包括以下几种:
1). 市区道路:在市区道路行驶时,车辆比较密集,行驶速度较慢,但存在突然刹车、变道等情况,此时 FCW 系统可以帮助驾驶员及时预警和采取措施,避免交通事故的发生。
2). 高速公路:在高速公路行驶时,车辆速度较快,路况变化较少,但存在车辆停车或变道等突发情况,此时 FCW 系统同样可以帮助驾驶员快速反应并避免交通事故的发生。
3). 夜间行驶:在夜间行驶时,视线不良,驾驶员会更容易疲劳,加之夜间路况变化较大,此时FCW 系统可以帮助驾驶员提高警惕性并避免碰撞危险。
4). 雨雪天气:在雨雪天气行驶时,路面湿滑,视线模糊,车辆容易失控,在这种情况下,FCW 系统可以帮助驾驶员预判危险并提前采取措施,避免交通事故的发生。
2. 当本车与前方车辆存在追尾风险时,FCW需通过预警方式提醒驾驶员进行制动;
3. FCW 预警策略分级:
一级预警:警告等级:当前方车辆与自车的距离缩短,或者前方车辆行驶速度反应不及时时,系统会发出明显的声音和/或光线提示,告诉驾驶员需要注意避免碰撞。
二级预警:紧急等级:当自车与前车距离非常接近或有碰撞风险时,系统将发出强烈的声音和/或光线提示,有些厂商甚至可能会启动紧急制动系统来减速或停车。
4. 驾驶员可通过 APP 进行 FCW 功能的开启和关闭;
5. 驾驶员大角度转向或急打方向盘进行主动干预时,FCW 功能需要关闭;当驾驶员主动干预结束后,FCW 功能自动恢复;
6. 驾驶员打转向灯准备转弯时,FCW 功能关闭;当转向灯关闭后,FCW 功能自动恢复;
7. 开启双闪状态下,FCW 功能关闭。
2.2 FCW 控制系统接口
FCW 控制系统接口参见下图。
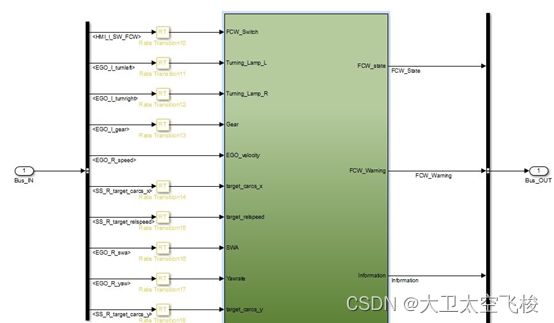
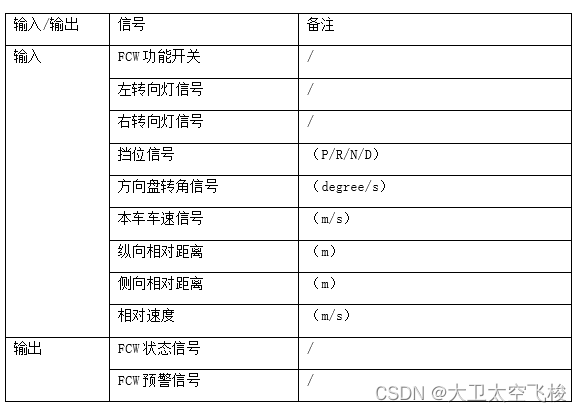
根据 FCW 算法功能定义,可知 FCW 控制系统需输入 FCW 开关、转向灯、方向盘转角、车速等整车信号及传感器环境感知的目标信息,而需要输出 FCW 预警信号。具体见下表:
FCW 控制系统接口
2.3 FCW 控制系统算法
FCW 控制系统主要由模式控制(驾驶员干预)模块、信息处理模块、状态控制逻辑模块和人机交互四大部分组成。
2.3.1 模式控制模块
模式控制模块的功能是根据驾驶员相关状态对 FCW 功能模式进行控制,主要实现 FCW 功能的使能控制和驾驶员主动干预功能。
2.3.2 信息处理模块
信息处理模块的功能是对环境感知信息和本车信息进行实时处理,并进行车辆危险程度评估。
目前 FCW 系统危险程度评估算法大多采用三段式距离判定方法和 TTC 碰撞事件判别方法,具体为:第一部分为预警距离(驾驶员反应时间内的距离);第二部分为制动距离(利用运动学公式,表征系统加速作用距离);第三部分为预制安全距离(制动结束后本车与前车预留的安全距离,可通过本车速度或相对速度查表)。
距离判别公式如下:

式中:Vhost——本车车速;Vrel——相对车速(前车 – 本车);Tw——预警延时1;Thw——预警延时2;Tpr ——升压延时;Aw——FCW 强制动加速度;Safe ——安全距离;Dis ——预设距离。
2.3.3 状态控制逻辑模块
状态控制逻辑模块的功能是根据两车状态信息和危险程度评估的数据实时进行 FCW 状态控制,参见下图。
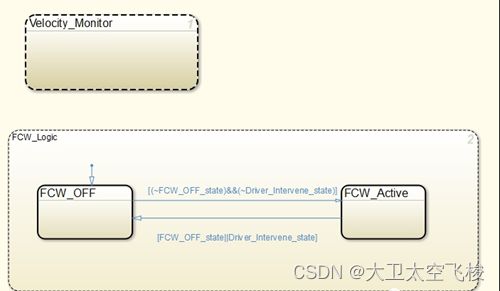
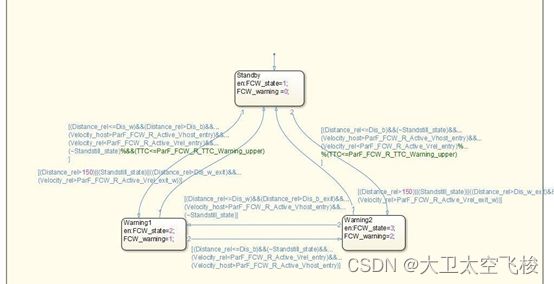
FCW 的状态定义为:
OFF:FCW 功能关闭;
Active:FCW 功能开启状态;
Standby:FCW 功能开启准备;
Warning1:FCW 一级预警;
Warning2:FCW 二级预警。
2.4 HMI 人机交互显示及预警
当车速大于 30km/h,并且车距≤2.5 时,才开始显示车距。
2.4.1 车距刻度值
当 0<车距≤1.0 时,最小刻度为 0.1,如 0.1、0.2、0.3...0.9、1.0;
当 1<车距≤2.0 时,最小刻度为 0.2,如 1.2、 1.4、16、1.8、 2.0;
当 2<车距≤2.5 时,最小刻度为 0.5,即只有 2.5。
2.4.2 车辆图标颜色
当 0<车距 ≤1.0 时,车辆图标为红色;
当车距>1.0 时,车辆图标为白色。
2.4.3 车距数字颜色
当 0<车距≤0.6 时,车距数字为红色;
当车距>0.6 时,车距数字为白色。

2.4.4 车辆告警声音或其他辅助动作
可根据需要设置两级预警。最早可以在预计发生追尾碰撞前 2.7 秒时,设置车辆图标变红闪烁,并发出紧促的滴滴声音告警。当两辆车距靠近 1.0 时(进入危险距离),可设置自车发出“叮”一声告警或拉紧安全带等提示动作。