普中STM32-PZ6806L开发板(HAL库函数实现-访问多个温度传感器DS18B20)
简介
我们知道多个DS18B20的DQ线是可以被挂在一起的, 也就是一根线上可以访问不同的DS18B20而不会造成数据错乱, 怎么做到的,其实数据手册都有说到, 就是靠64-bit ROM code 进行识别, 也可以理解成Serial Number进行识别, 因为主要差异还是在Serial Number上面;
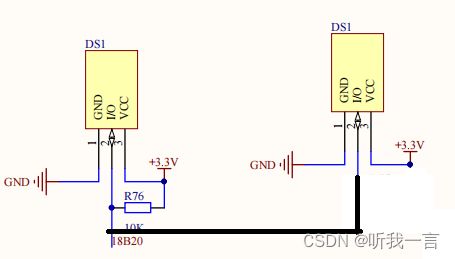
电路图
两个DS18B20连接到一起
实现步骤
创建项目
基于 上一篇 普中STM32-PZ6806L开发板(HAL库函数实现-温度传感器DS18B20)
添加用户代码
获取DS18B20的Serial Number信息, 然后记录下来, 用于向指定DS18B20获取温度值
typedef struct
{
uint8_t familyCode;
uint8_t sns[6];
uint8_t crc;
} SENSOR_DS18B20_SerialNumberInfo;
SENSOR_DS18B20_SerialNumberInfo SENSOR_DS18B20_GetSN(void)
{
SENSOR_DS18B20_SerialNumberInfo info;
uint8_t recvs[8] = { 0 };
SENSOR_DS18B20_Reset ();
HAL_Delay (1);
SENSOR_DS18B20_Write (0x33); // read rom
HAL_Delay (1);
// 1 byte -> family code
// 2 ~ 7 byte -> serial number
// 8 byte -> CRC8
recvs[0] = SENSOR_DS18B20_Read(); // family code
info.familyCode = recvs[0];
for (int i = 0; i < 6; ++i) // serial number
{
recvs[i+1] = SENSOR_DS18B20_Read();
info.sns[i] = recvs[i+1];
}
recvs[7] = SENSOR_DS18B20_Read(); // CRC8
info.crc = recvs[7];
if (SENSOR_DS18B20_CRC8(recvs, 7) != recvs[7]) // CRC8 检查
{
info.familyCode = 0;
memset(info.sns, 0, sizeof(info.sns)/sizeof(uint8_t));
info.crc = 0;
return info; // CRC校验不一致
}
return info;
}
实现流程参考pdf

实现代码
/* 两个DS18B20设备 */
#include 代码
无需下载, 代码上面基本都提供了
Note:
支持你的DS18B20, 你需要修改, 改成你的DS18B20的信息
SENSOR_DS18B20_SerialNumberInfo ds18b20_infos[] =
{
{ 0x28, { 0x2E, 0x7C, 0x04, 0x05, 0x00, 0x00 }, 0xCC },
{ 0x28, { 0x2F, 0x7D, 0x10, 0x02, 0x01, 0x00 }, 0xBE }
};