JATG篇(1)——FT2232H入门
FT2232H入门
- Dependencies
- FT2232H
-
- 安装FTDI设备驱动
- 配置FT2232H 驱动方式
- 认识与控制MPSSE
-
- 认识MPSSE
- 软件控制MPSSE
-
- 1. 确认设备并打开设备
- 2. 配置FTDI设备以供MPSSE使用
- 3. 配置MPSSE
-
- 3.1 同步和错误命令检测
- 3.2 MPSSE
- 4. 串行同步通信
- 5. 访问GPIO
- 6. 复位MPSSE并关闭设备
- 点亮LED
-
- 点灯代码
Dependencies
- 硬件准备
- 带有FT2232H芯片板子
- USB连接线
- 一台电脑
- 软件准备
- 配置FT2232H的软件(FT_Prog_v3.12)
- FT2232H芯片驱动: CDM212364_Setup.zip
- FT2232H芯片库函数文件:FTD2xxx_lib
- 文档
- FT2232H Datasheet : FT2232H_Datasheet
- AN_124_User_Guide_For_FT_PROG: 配置FT2232H的软件使用说明
- AN_135_MPSSE_Basics: MPSSE 使用说明
- AN_108_Command_Processor_for_MPSSE_and_MCU_Host_Bus_Emulation_Modes:配置MPSSE的命令说明
- D2XX Programmer’s Guide: FT2232H 应用程序接口函数说明
- TN_153 Instructions on Including the D2XX Driver in a VS Express Project: 如何使用Visual Studio创建驱动FT2232H芯片工程
FT2232H
安装FTDI设备驱动
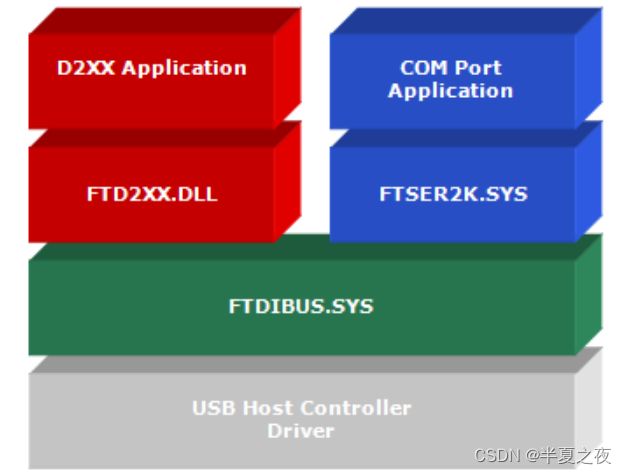
下载并安装FT2232H芯片Winows CDM(Comboned Driver Model)驱动CDM212364_Setup.zip后,可允许应用程序通过D2XXX DLL或COM端口访问FTDI设备。但是注意,应用程序一次只能与一个接口进行通信,即是不能同时向一个端口发送COM端口命令和D2XXX命令。
CDM驱动程序下图所示的两个部分:
FTDIBUS.SYS总线层:提供D2XXX类型功能FTSER2K.sys串行COM端口:COM端口应用
配置FT2232H 驱动方式
- 下载并安装读写FT2232H的EEPROM软件(FT_Prog_v3.12),然后
配置FT2232H芯片的BDBUS驱动方式- 打开FT_Prog软件,此时界面一偏空白
- 选择
DEVICES—>Scan and Parse—> 下图
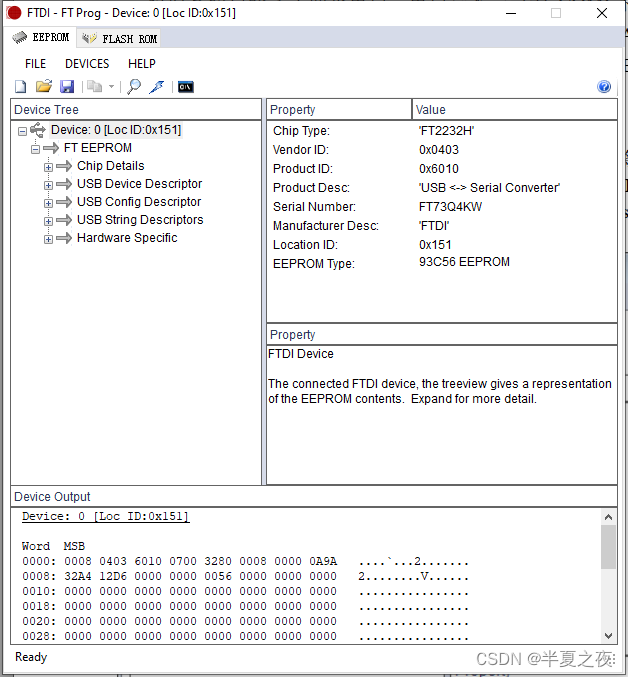
- 配置驱动方式

认识与控制MPSSE
认识MPSSE
FT2232H芯片能够完成USB转UART、FIFO、JTAG、SPI、IIC等接口,主要是通过MPSSE完成。现在认识一下MPSSE,MPSSE是Multi-Protocol Synchronous Serial Engine的缩写,中文就是多协议同步串行引擎,通过下面的FT2232H的结构框图,可以看出,在FT2232H内的USB Protocol Engine And FIFO control接收并解析电脑端发送的数据,然后控制MPSSE, 通过MPSSE产生符合UART, JTAG,SPI以及IIC等接口信号,从而完成USB 到 UART, SPI, JTAG, IIC等低速协议接口的转换。
那么,想要完成与JTAG,SPI等低俗协议接口的通信核心就是如何控制MPSSE?

软件控制MPSSE
MPSSE的驱动过程如下图所示,主要分为6步:
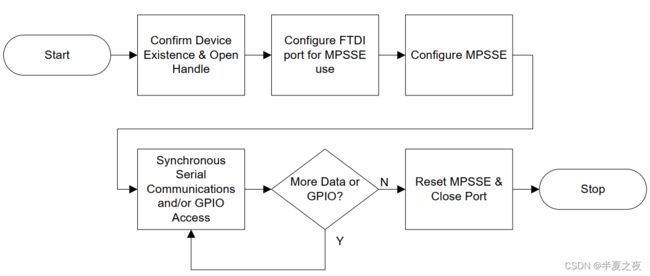
1. 确认设备并打开设备
在使用 MPSSE 之前,需要先通过调用D2XXX API了解有多少 FTDI 设备连接到电脑并选择正确的设备。
FT_GetDeviceInfoList: 该函数会返回有关每个可用设备的信息FT_GetDeviceInfoList或FT_GetDeviceInfoListDetailFT_Open或FT_OpenEx
2. 配置FTDI设备以供MPSSE使用
打开M端口后,需要配置一些参数才能启用MPSSE.
FT_ResetDevice: 复位FTDI端口FT_SetUSBParameters: 配置USB传输的最大SizeFT_SetChars: 配置事件和错误字符FT_SetTimeouts: 配置以毫秒为单位的读写超时FT_SetLatencyTimer: 配置USB数据包从外设发送到主机之前等待的时间FT_SetFlowControl:配置RTS/CTS流控制,确保在缓存区无法接收数据时驱动程序不会发出IN请求FT_SetBitMode:- Mode=0, Mask=0, 复位MPSSE控制器,而不是端口
- Mode=2,Mask=0,使能MPSSE控制器,PIN方向稍后通过MPSSE命令控制
3. 配置MPSSE
完成FTDI设备配置后,MPSSE已经准备好接收命令。MPPSSE命令由一个控制码和一个或多个参数组成。 控制MPSSE的命令见AN_108_Command_Processor_for_MPSSE_and_MCU_Host_Bus_Emulation_Modes。
配置MPSSE的命令格式如下:
| Bit Index | Description |
|---|---|
| Bit 0 | 置高表示在时钟下降沿 写操作,否则在上升沿 |
| Bit 1 | 数据模式为单比特模式还是字节模式 |
| Bit 2 | 置高表示在时钟下降沿 读操作,否则在上升沿 |
| Bit 3 | 置高表示传输传输低有效位优先,否则反之 |
| Bit 4 | 置高表示写TDI |
| Bit 5 | 置高表示读 TDO |
| Bit 6 | 置高表示写TMS |
| Bit 7 | 0 |
// 如需要仅对TMS进行写操作,LSB, Bit Mode: 对应MPSSE Command Code : 0x4B
// bit[6] = 1
// bit [5:4] = 2'b00
// bit[3] = 1, LSB
// bit[2] = 0
// bit[1] = 1, 数据传输以单比特模式, 故此时需要传输6-bit长度数据,可以将长度参数设置为5
// 如数据传输以字节模式,每次数据传输必定以Byte对齐,此时长度参数为n时,对应(n+1)*8 clocks
// bit[0] = 1 时钟下降沿数据发送变化
byOutputBuffer[dwNumBytesToSend++] = 0x4B; // Bit Mode
byOutputBuffer[dwNumBytesToSend++] = 0x05; // Number of clock pulses = Length + 1 (6 clocks here)
byOutputBuffer[dwNumBytesToSend++] = 0x0D; // Data is shifted LSB first, so the TMS pattern is 101100
ftStatus = FT_Write(ftHandle, byOutputBuffer, dwNumBytesToSend, &dwNumBytesSent);
FT_Write:用于向MPSSE发送命令(控制码和命令参数)FT_Read:用于读取MPSSE的信息
!注: FT_Write()函数每次不仅限于一个MPSSE命令, 即是可以将多个MPSSE命令添加到发送发送序列,然后调用一次FT_Write将这些多个MPSSE命令发送到FTDI设备。
3.1 同步和错误命令检测
如果FTDI设备接收到错误命令,MPSSE会返回0xFA,以及引起错误的命令的字节。
使用错误命令检测是确定MPSSE是否与应用程序同步的一种手段。通过故意发送错误命令,并在接收数据中查找0xFA,可以确定应用程序是否可以与MPSSE通信。
3.2 MPSSE
对于其他的FTDI芯片,通信建立后,必须配置MPSSE:
- 时钟速度
- 引脚方向(Input/Output)
- 引脚的初始值(Low/High)
而对于FT2232H和FT4232H芯片,还需要额外配置(尽管默认设置可适用于某些特定的程序,但是最好还是禁用以明确操作):
- 分频器(默认5分频)
- 三相数据时钟
- JTAG自适应时钟
4. 串行同步通信
完成配置所有参数后,可以开始与外设进行通信。MPSSE 可置于环回模式以进行诊断。 除了从 DO 引脚传输数据外,它还在内部连接到 DI 引脚。在正常模式和环回模式下,有 32 种数据传输接收方式或同时传输和接收方式的选择。数据传输方式的选择取决于以下几点( FT_Write命令后跟 FT_GetStatus 和 FT_Read 以读回来自外设的响应 ):
- 高有效位优先或低有效位优先,注意每个字节的都是按顺序传输的,如果数据超过8-bit,则必须以正确的顺序将数据送入缓存
- 仅发送数据,仅接收数据或同时发送和接收数据
- 在上升沿或下降沿发送; 在上升沿或下降沿接收
5. 访问GPIO
每个带有MPSSE的FTDI芯片都有一些通过输入、输出引脚。与串行通信一样, FT_Write 可以用来设置方向和输出值,并提示MPSSE返回实际引脚状态。通过 FT_Read 命令用来检索包含引脚状态所有的信息。
6. 复位MPSSE并关闭设备
FT_Close
点亮LED
某宝买的FT2232H 电路板,与LED连接原理图

点灯代码
#include