基于元胞自动机的三车道交通流模型matlab模拟和仿真
目录
1.元胞自动机模型
2.状态更新规则
3.MATLAB程序
4.MATLAB仿真
1.元胞自动机模型
元胞自动机(Cellular Automaton, 简称CA)是一种离散模型,由一组按规则排列的元胞组成,并且每个元胞都遵循一套局部相互作用规则进行更新。由于其离散性和局部性,元胞自动机在模拟复杂系统时具有较高的计算效率和可扩展性。
元胞自动机(Cellular Automaton, CA)是一种离散模型,由一组按规则排列的元胞组成,每个元胞都遵循一套局部相互作用规则进行更新。在交通流模型中,元胞通常代表道路的一段,车辆则按照一定的规则在这些元胞上移动。
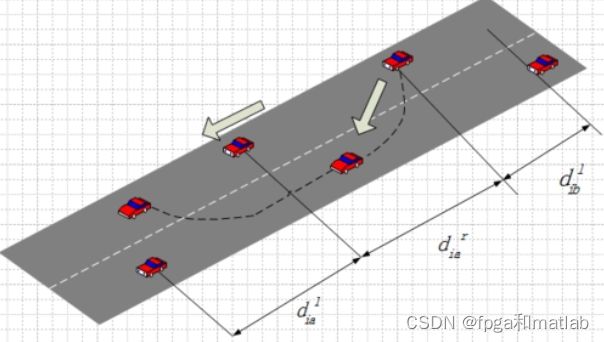
在三车道交通流模型中,道路被划分为三个并行的车道,每个车道进一步细分为一系列等长的元胞。车辆可以在这些车道上换道、加速、减速或保持速度。
元胞自动机由三个基本组成部分构成:元胞、元胞空间和演化规则。
元胞是自动机的基本单元,分布在离散的一维、二维或多维格点上。每个元胞具有一个有限的状态集合,这些状态可以是二进制(如0和1),也可以是多进制(如0、1、2...)。元胞的状态随时间变化。
元胞空间是元胞分布的空间网格的集合,可以是任意维数的。例如,一维元胞自动机由一条直线上的元胞组成,二维元胞自动机则由一个平面上的元胞组成。元胞空间的边界条件可以是周期的(即边界上的元胞与另一边的元胞相连),也可以是固定的或反射的。
演化规则定义了元胞状态如何随时间变化。在每个时间步,每个元胞都根据其当前状态及其邻居的状态来更新其状态。邻居的定义依赖于元胞空间的维度和所选的邻域类型(如冯·诺依曼邻域、摩尔邻域等)。
2.状态更新规则
元胞自动机(Cellular Automaton, 简称CA)的状态更新规则是构成其动力学演化的核心组成部分。这些规则定义了在离散的时间步长内,元胞如何基于其自身及其邻居的当前状态来改变其状态。元胞自动机的状态更新规则具有局部性,即每个元胞的下一状态仅取决于其邻近元胞的当前状态,而不依赖于全局信息。
元胞自动机的演化遵循局部性原理,即每个元胞的下一状态仅由其自身和邻近元胞的当前状态决定。这种局部性原理是元胞自动机模型的一个重要特征,使得模型具有高效计算和并行处理的能力。在元胞自动机中,所有元胞的状态更新是同步进行的。在每个离散的时间步长内,所有元胞都根据相同的规则同时更新其状态。这种同步更新机制确保了模型的一致性和可预测性。元胞自动机的状态更新规则可以是确定性的,也可以是概率性的。确定性规则意味着给定相同的初始条件和邻居配置,元胞的下一状态总是确定的。而概率性规则则引入了一定的随机性,使得元胞的下一状态以一定的概率分布变化。
车辆运动规则
加速:如果前方元胞为空,车辆将尝试加速到最大速度 (vmax)。
减速:如果前方车辆较近,车辆将减速以避免碰撞。
随机慢化:以一定概率 (p),车辆即使没有遇到障碍物也会减速。
换道规则
安全性:换道前必须确保目标车道上的相邻元胞为空,以避免碰撞。
激励条件:车辆可能会因为前方车辆较慢或为了避开障碍物而换道。
对称性:换道规则应适用于左右两个方向。
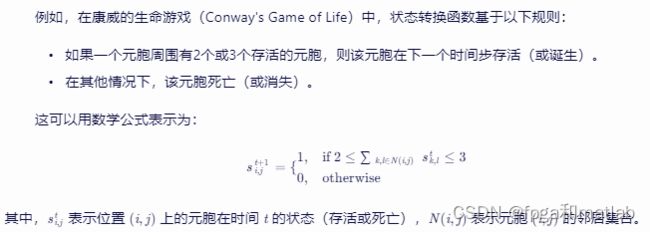
元胞状态更新可以用以下数学公式表示:

状态转换函数 f 是元胞自动机的核心,它决定了元胞如何根据当前状态和其邻居的状态来更新其状态。函数 f 可以是确定性的,也可以是概率性的。
3.MATLAB程序
function [plaza,v,vmax]=switch_lane(plaza,v,vmax,gap,LUP,LDOWN);
[L,W]=size(plaza);% The size of the lane
changeL=zeros(L,W);% can turn left
changeR=zeros(L,W);% can turn right
% can turn left?
for lanes=2:W-2;
temp=find(plaza(:,lanes)==1);
nn=length(temp);
for k=1:nn;
i=temp(k);
if(v(i,lanes)>gap(i,lanes)&LUP(i,lanes)==1&LDOWN(i,lanes)==1)
changeL(i,lanes)=1;
end
end
end
% can turn right?
for lanes=3:W-1;
temp=find(plaza(:,lanes)==1);
nn=length(temp);
for k=1:nn;
i=temp(k);
if(plaza(i,lanes-1)==0&plaza(mod(i-1-1,L)+1,lanes-1)==0&plaza(mod(i-2-1,L)+1,lanes-1)==0&plaza(mod(i,L)+1,lanes-1)==0&plaza(mod(i+1,L)+1,lanes-1)==0)
changeR(i,lanes)=1;
end
end
end
% turn right first
for lanes=3:W-1;
temp=find(changeR(:,lanes)==1);
nn=length(temp);
for k=1:nn;
i=temp(k);
plaza(i,lanes-1)=1;
v(i,lanes-1)=max(v(i,lanes)-1,1);
vmax(i,lanes-1)=vmax(i,lanes);
plaza(i,lanes)=0;
v(i,lanes)=0;
vmax(i,lanes)=0;
changeL(i,lanes)=0;
end
end
% turn left
for lanes=2:W-2
temp=find(changeL(:,lanes)==1);
nn=length(temp);
for k=1:nn;
i=temp(k);
plaza(i,lanes+1)=1;
v(i,lanes+1)=max(v(i,lanes)-1,1);
vmax(i,lanes+1)=vmax(i,lanes);
plaza(i,lanes)=0;
v(i,lanes)=0;
vmax(i,lanes)=0;
end
end
end
up40154.MATLAB仿真
基于元胞自动机的三车道交通流模型通过一系列局部相互作用规则模拟了现实世界中复杂的交通现象。这些规则包括车辆加速、减速、随机慢化和换道行为。通过调整模型参数(如最大速度、随机慢化概率等),可以模拟不同的交通条件和驾驶行为,从而研究交通拥堵、事故风险等问题。