STM32通过PWM输出使蜂鸣器实现播放音乐功能
源码下载链接[点击跳转] https://download.csdn.net/download/Coin_Collecter/88641632
https://download.csdn.net/download/Coin_Collecter/88641632
1.什么是PWM输出
PWM,全称Pulse Width Modulation,即脉宽调制技术,是一种通过改变信号的占空比来控制电路的技术。在PWM信号中,周期是固定的,而占空比则可以根据需要进行调整。通过改变占空比,可以控制电路输出的电压、电流等物理量的大小,从而实现对电路的控制。PWM频率是指一秒钟内从高电平时间在到低电平时间,再从低电平跳到高电平的瞬间次数,也就是一秒钟内有多少个PWM的周期。PWM周期是指一秒钟内从高电平时间在到低电平时间。PWM占空比是指一个周期内高电平时间和总时间的比值。
PWM的基本产生如下图,即面积等效法,当b的占空比为百分之百的时候,a输出为高电平,而当b在一个周期占空比为其他数值的时候,根据定积分产生的正弦波面积则不同,经过多个周期不同占空比的时候,就会产生不同的面积波形,即产生了一个模拟信号。
PWM在生活中有很多应用,例如通过PWM输出控制LED亮度,当频率太小的时候,一个周期时间太长肉眼就能看到LED亮灭的过程,而当频率足够高的时候,LED的灯光的亮灭速度赶不上开关速度(LED灯还没完全亮就又熄灭了)由于视觉暂留作用人眼不感觉电灯在闪烁,而是感觉灯的亮度减小了,从而达到了控制LED亮度的效果。

2.如何让蜂鸣器发出不同频率的声音
2.1设置预分频
void TIMx_BEEP_Config(void){
//......省略部分代码
TIM_TimeBaseStructure.TIM_Period = 1;//当定时器从0计数到255,即为256次,为一个定时周期
TIM_TimeBaseStructure.TIM_Prescaler = 72-1;//设置预分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0;//设置时钟分频系数:不分频
TIM_OCInitStructure.TIM_Pulse = 0;//占空比0
//......省略部分代码
} 由代码可见预分频值为71,则为72分频(多少分频都可以,72分配只是为了方便后面计算),由于STM32的默认系统时钟频率为72MHz,分频后则为1MHz。此时定时器会在一秒内计数1M次,且由 ![]() 知道,可以通过改变周期T来得到任意频率f。
知道,可以通过改变周期T来得到任意频率f。
通过固件库函数TIM_SetAutoreload(TIM_TypeDef* TIMx, uint16_t Autoreload);修改自动重装载寄存器周期的值即可得到任意频率的PWM输出。
通过TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);来修改比较寄存器中的比较值,改变PWM输出的占空比。
2.2音调频率对照图:
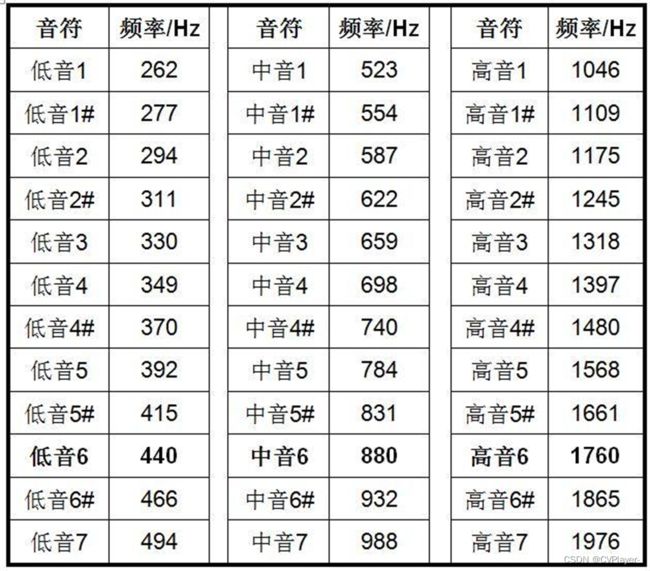
在有了音调频率对照图后只需要通过调整PWM输出频率即可控制蜂鸣器发出不同的音调,实现通过蜂鸣器播放音乐。
由上述可知,分频后频率为1MHz,且![]() ,频率已知,因此可以算出所需的T的值。例如低音1的
,频率已知,因此可以算出所需的T的值。例如低音1的![]() 。
。
2.3定义一个修改占空比和寄存器周期值的函数
定义一个set_beep(uint16_t f)函数,变量f为音调频率,通过该函数即可实现让蜂鸣器发出任意频率的声音。
void set_beep(uint16_t f){
if(f==0){
TIM_SetAutoreload(TIM1,1);
TIM_SetCompare1(TIM1,0);
}else{
TIM_SetAutoreload(TIM1,(1000000/f));
TIM_SetCompare1(TIM1,(1000000/f)/15);
}
}3.孤勇者乐谱
 4.实例代码
4.实例代码
main.c
#include "stm32f10x.h"
#include "Beep.h"
#include "SysTick.h"//里面写了一个延时函数,不重要,因此不上传该部分的代码
#define L1 262-1//低调 do 的频率
#define L2 294-1//低调 re 的频率
#define L3 330-1//低调 mi 的频率
#define L4 350-1//低调 fa 的频率
#define L5 392-1//低调 sol 的频率
#define L6 440-1//低调 la 的频率
#define L7 494-1//低调 si 的频率
#define M1 524-1//中调 do 的频率
#define M2 588-1//中调 re 的频率
#define M3 660-1//中调 mi 的频率
#define M4 700-1//中调 fa 的频率
#define M5 784-1//中调 sol 的频率
#define M6 880-1//中调 la 的频率
#define M7 988-1//中调 si 的频率
#define H1 1048-1//高调 do 的频率
#define H2 1176-1//高调 re 的频率
#define H3 1320-1//高调 mi 的频率
#define H4 1480-1//高调 fa 的频率
#define H5 1640-1//高调 sol 的频率
#define H6 1760-1//高调 la 的频率
#define H7 1976-1//高调 si 的频率
#define S 0//不发音
int16_t music[]=
{
M3,M3,S,S,M1,M2,M1,M3,M3,S, //都是勇敢的
M1,M2,M1,M2,M3,L6,M1,L6,M1,L6,M1,M2,M1,L7,L7,S,S, //你额头的伤口你的不同你犯的错
M3,M3,S,S,M1,M2,M1,M3,M3,S, //都不必隐藏
M1,M2,M1,M2,M3,L6,M1,L6,M1,L6,M1,M3,M2,L7,L7,S,S, //你破旧的玩偶你的面具你的自我
L6,M1,M6,M6,M6,M5,M6,M6,M5,M6,M5,M6,M5,M3,M3,M3,S,S, //他们说要带着光驯服每一头怪兽
L6,M1,M6,M6,M6,M5,M6,M5,M7,M7,M7,M6,M7,M7,M6,M3,M3,S,S, //他们说要缝好你的伤没人爱小丑
M3,M5,M3,M2,M3,M2,M3,M2,S, //为何孤独不可光荣
M3,M5,M3,M5,M3,M2,M3,M2,M3,M2,S, //人只有不完美值得歌颂
M1,M2,M3,L6,M1,M3,M2,M3,M2,M1,M1,L6,L6,S,S,//谁说污泥满身的不算英雄
M6,M7,H1,H2,M7,H1,H1,S, //爱你孤身走暗巷
H1,M7,H1,H2,M7,H1,H1,S, //爱你不跪的模样
H1,H2,H3,H2,H3,H2,H3,H3,H2,H3,H5,H3,S, //爱你对峙过绝望不肯哭一场
M6,M7,H1,H2,M7,H1,H1,H1,M7,H1,H2,M7,H1,H1,S, //爱你破烂的衣裳却敢堵命运的枪
H1,H2,H3,H2,H3,H2,H3,H3,H2,H3,H5,H3,S, //爱你和我那么像缺口一样
H5,H3, //去吗
H5,H3,S, //配吗
H5,H3,H5,H6,H3,H5,S, //这褴褛的披风
H5,H3,//战吗
H5,H3,S, //战啊
H5,H3,H5,H6,H3,H5,H5,H5,H3,H2,H2,H2,H1,H3,H3,H2,H2,H2,H1,H1,M6,M6,S,S, //以最卑微的梦致那黑夜中的呜咽与怒吼
H5,H5,H3,H2,H2,H2,H1,H3,H3,H2,H2,H2,H1,H1,M6,M6,S,S, //谁说站在光里才算英雄
};
int main(void)
{
uint16_t i;
TIMx_BEEP_Config();
while(1)
{
for(i=0;iBeep.c
#include "Beep.h"
//不同型号的单片机蜂鸣器所对应的引脚和定时器都有所不同,需要根据实际情况修改
void TIMx_BEEP_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 1;
TIM_TimeBaseStructure.TIM_Prescaler = 72-1;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1, ENABLE);
TIM_CtrlPWMOutputs(TIM1,ENABLE);
TIM_Cmd(TIM1, ENABLE);
}
void set_beep(uint16_t f)
{
if(f==0){
TIM_SetAutoreload(TIM1,1);
TIM_SetCompare1(TIM1,0);
}else{
TIM_SetAutoreload(TIM1,(1000000/f));
TIM_SetCompare1(TIM1,(1000000/f)/15);
}
}Beep.h
#include "stm32f10x.h"
void TIMx_BEEP_Config(void);
void set_beep(uint16_t f);