论文解读--System Performance of a 79 GHz High-Resolution 4D Imaging MIMO Radar With 1728 Virtual Channel
1728虚拟通道79 GHz高分辨率4D成像MIMO雷达系统性能研究
摘要
未来的驾驶员辅助和自动驾驶系统需要高分辨率的4D成像雷达,即使在恶劣的天气或光照条件下,也能提供有关车辆周围环境的详细而可靠的信息。在这项工作中,提出了一种具有1728个虚拟通道的新型高分辨率雷达系统,比目前最先进的汽车雷达传感器信道数高出9倍。为了实现该系统,采用了一种新的混合馈通和配电网拓扑结构来分配斜坡振荡器信号。设计制作多层印刷电路板,所有元件组装在背面,射频信号分布在埋地层,只有天线在正面。该阵列被优化为支持多输入多输出操作和发射波束形成。实现了发射天线和接收天线靠近收发器的稀疏阵列,形成具有130°× 75°大无模糊区域的2D阵列,最大旁瓣电平为−15 dB。该阵列的特点是3dB波束宽度分别为0.78°× 3.6°的方位角和俯仰角。在微波暗室的雷达测量表明,在4D雷达图像的距离角切片中,即使是微波暗室中吸收器的单个峰也可以被检测和分离。该性能通过停车场的测量得到验证,在停车场中,汽车、行人、围栏和路灯可以被检测、分离,并正确估计其大小和位置。
1 介绍
雷达传感器用于各种应用领域,因为即使在恶劣的环境条件下,它们也能够提供有关周围物体的距离,速度和到达方向(DoA)的准确信息[1]-[5]。通过在二维空间中分布天线,可以实现方位角和俯仰角的DoA估计,从而形成4D成像系统[6],[7]。这种信息深度是开发77 / 79GHz汽车频段自动驾驶和未来高级驾驶辅助系统(ADAS)所必需的[8]-[10]。然而,特别是在4D成像中,需要大量的通道才能获得准确的低旁瓣DoA估计。一种广泛使用的需要减少物理硬件通道数量的方法是多输入多输出(MIMO)原理[11]-[13]。
在比较旧系统[14]和具有128个虚拟通道的最新系统[15]时,可以观察到虚拟(Vx)通道NVx和2D DoA估计数量不断增加的趋势,参见表1中给出的概述。为了实现通常具有192个虚拟通道的更大系统[16],将4个具有3个发射(Tx)和4个接收(Rx)通道[17]的单片微波集成电路(MMIC)组合在一起。基于这种拓扑结构,实现了大多数通道分布在方位角平面的不同系统。这导致波束宽度很宽[18]或在俯仰角平面上有很大的稀疏度[19]。另一种不同的概念是将可用通道分成一个小的无模糊阵列和一个具有窄波束宽度的大阵列,并在后处理中解决后者的模糊性[20]。在[21]中,具有类似MMIC的系统的192个通道被划分为具有不同视场(FOV)的三个雷达子系统,以涵盖不同的用例并解决每个单独阵列的模糊性。
表1 最先进的汽车雷达系统概述
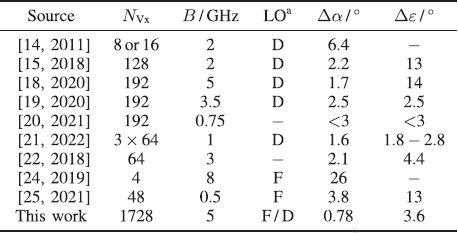
在所有这些系统中,需要计算密集型的后处理来解决模糊,这在诸如低信噪比(SNR)或复杂的多目标情况下的恶劣条件下容易出错。对于[22]中明确但非常稀疏的阵列,需要进行[8]所示的复杂重构来降低DoA估计中的副瓣电平(SLL),具有与上述相同的局限性。为了减少稀疏性,从而减少后处理的工作量,需要更高的通道数。在[23]中,将四个具有独立信号合成的相干组组合在一起,实现了具有256个虚拟通道的系统,降低了调频连续波(FMCW)信号分布的复杂性。为了进一步减少设计时间和硬件复杂性方面的工作量,可以使用馈通拓扑,如小型3D[24]和4D[25]雷达系统所示。到目前为止,信号分布中的时间延迟是这类系统设计的一个限制因素。
这篇文章中,提出了一种新的4D雷达成像系统。为了克服以往系统的局限性,实现了具有较小稀疏度的大型二维天线阵列。这导致在方位角和俯仰角平面上的窄波束宽度和低SLL,从而实现鲁棒的DoA估计。此外,高达1728的通道数导致高处理增益,从而具有优越的检测能力。采用长度匹配的配电网和馈电线路,实现了一种组合的系统拓扑结构,减少了硬件的工作量。通过这种组合,可以使用来自不同MMIC的多个Tx通道进行相干Tx波束形成,并且在距离-多普勒频谱中易于校正所有通道之间的时间延迟[26]。
本文组织结构如下:第二节对系统概念进行了介绍和分析。实现的传感器将在第三节中介绍。在第四节中,验证了系统的性能,并最终在第五节中展示了一个现实的汽车场景。
2 系统概念
所提出的雷达系统如图1的系统概念所示,由12个收发器MMIC组成,形成一个具有1728个通道的虚拟阵列。MMIC以6 × 2阵列分布,实现了方位角和俯仰角方向的超大孔径,以满足复杂汽车雷达场景的要求。每个6个Tx天线排列成一个2 × 3均匀矩形阵列(URA),从而形成一组,使能Tx波束形成。
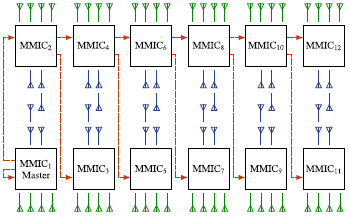
图1 高分辨率4D成像雷达系统示意图。它由12个收发器MMIC组成,每个MMIC包含3个Tx(—)和4个Rx(—)通道。每6个发射机组成一组,可在其中进行波束形成。FMCW信号(---)采用无源分布和馈通拓扑相结合的分布方式。
A 结合FMCW信号分配概念
FMCW信号在单个MMIC的斜坡振荡器(RO)中以发射频率的四分之一产生。这个MMIC起主控的作用。通常,在主MMIC的RO输出上采用两个长度匹配的1对2无源配电网络,为192个通道系统中的所有4个MMIC供电[16],[18]。在每个MMIC中,用一个倍频器将RO信号上变频[17],[27]。
为了使Tx波束形成,一组的两个MMIC都需要相位同步的RO信号。这可以通过使用长度匹配的配电网络来实现,这是以PCB上的大空间需求为代价的,并且当使用超过4个MMIC时需要额外的放大器。在提出的系统概念中,每一组通过来自前一组的一个MMIC的长度匹配的线路馈电,见图1中的(-->),实现了混合馈电和分布拓扑。这样,只需要12条长度匹配的传输线,而不需要放大器、功率分配器或大型配电网络。线路长度的选择使其满足RO输入的功率要求,并允许如下所述的范围偏移量易于校正。
一般情况下,RO信号分布中单个传输线的长度Li会导致一个距离偏移[26]
 (1)
(1)
式中εr,eff为传输线的有效相对介电常数。使用距离分辨率δR = c0/(2B)[4],由馈通拓扑引起的距离单元中的偏移为
 (2)
(2)
使用光速c0和FMCW信号的频宽B。这导致距离单元iR, Rx的移位,在此距离频谱中可见一个峰值。在长度匹配的推荐拓扑中,L, iR, Rx为
 (3)
(3)
其中,R为实际距离,IGroup为发送或接收MMIC的组索引,NGroup为MMIC组个数。如果延迟发生在接收MMIC的馈电中,雷达目标看起来更近;如果它发生在发射机的馈电中,它就会显得更远。通过选择长度L,使ΔiR, FTT为整数,可以通过将距离谱(经过距离多普勒处理[28]得到)移动相应的距离bin[26]来轻松地校正偏移量:
![]() (4)
(4)
其中减号是所需的距离单元移位。如果将目标响应移到负范围单元格,则此校正会导致错误,参见IGroup, Tx < IGroup, Rx的(3)。由于真实采样情况下的图像频率问题[29],目标响应在正距离单元被检测到,如(4)中的幅度算子|. |所示。因此,在错误的方向上进行了校正。由于这种情况只发生在比最大距离偏移((NGroup−1)ΔiR, FTT)更近的目标上,通常只有Tx到Rx的泄漏信号受到影响。
B PCB技术
如图2所示的印刷电路板(PCB)层堆栈用于所提出系统的设计。为了防止不必要的辐射,所有射频(RF)信号都在埋地带状线上路由,MMIC放置在PCB的背面。这允许有效的冷却与大型散热器,而不影响天线特性。因此,PCB的顶层是专门为天线预留的,没有安装任何组件。
通过使用FR4[30]的低损耗垂直过渡,PCB可以在成本效益高的高密度互连工艺中制作。从MMIC到带状线的2dB损耗与传统的MMIC到微带线的转换相当。

图2 多层PCB的横截面示意图,顶部是天线,背面是SMD组件。
C MIMO天线阵列
为了减少射频线路损耗,3个发射和4个接收天线位于靠近单个MMIC的位置。天线放置在方位角间距为2mm的网格上,该网格仅略大于半波长λ/2。在俯仰角上,网格被扩大到2.25mm,以增加孔径大小,对无模糊区域的影响是可以容忍的。
由于每个MMIC及其相关表面贴装器件(SMD)部件的面积约为30 × 50mm2,因此Tx天线组放置在30mm的网格上,优化后的天线阵列如图3所示。设计了一个硬件孔径为184 × 40.5mm2的交错稀疏阵列。利用[6]中的遗传优化,优化Rx天线位置以遵守设计限制并形成明确的阵列。优化后的Rx阵列性能分析如图4所示。一个明确的Rx阵列使一个明确的二维DoA估计独立于发射机的数量和位置。这是任意应用Tx波束形成所必需的。采用Rx阵列,即硬件孔径尺寸,实现方位角0.9°、仰角4°的窄波束宽度,如图4(a)所示。由于Rx天线之间在仰角方向的孔径中间存在间隙,在±8◦处,两个SLL为−2.9dB的主副瓣干扰了角度谱。这些在(b)所示的板侧方向的二维角度谱中也清晰可见。(c)中,最大SLL矩阵S以对数尺度表示。由于高程上存在两个主要副瓣,平均最大SLL为−2.9 dB。接收阵列在130◦× 75◦的大角度区域内是明确的。
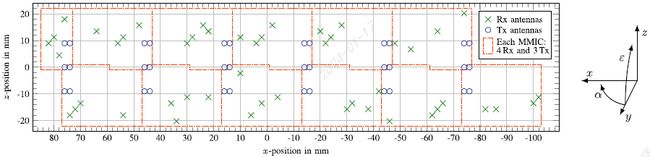
图3 基于12个雷达收发器的48个Rx和36个Tx通道的天线阵列示意图。
从二维天线阵列的四维模糊函数中导出最大SLL矩阵S,方便地评估二维天线阵列的无模糊区域和SLL。四维模糊度函数为[31]
 (5)
(5)
使用二维导向矢量
 (6)
(6)
其中xVx和zVx分别是虚拟阵元的x和z位置。上标r和e表示实际入射角和估计角度,λ0表示FMCW坡道起始频率处的自由空间波长,†和||.||分别表示转置复共轭和矢量范数。它是根据方位角计算的
![]()
步长为Δα,整数i和k介于1和方位角数目N之间,以及仰角
![]()
步长为Δε,整数j和l介于1和仰角数目M之间,对于给定的入射角对αri和εrj,矩阵
![]() (7)
(7)
表示一个单独的二维角度估计。本文提出了最大旁瓣矩阵,而不是在每个二维角度估计中确定最大旁瓣,并将相应的入射角分类为模糊或非模糊(取决于SLL最大值)。通过迭代χ中的所有入射角,首先在每个子矩阵![]() 中检测主瓣,然后将其设置为零:
中检测主瓣,然后将其设置为零:
![]() (8)
(8)
然后,将所有迭代合并到四维旁瓣函数![]() 中。最后得到最大的SLL矩阵
中。最后得到最大的SLL矩阵
 (9)
(9)
如图4(c)所示。将S与固定阈值进行比较,会得到[6]中引入的模糊度指标矩阵Q,但S可以更好地可视化和洞察阵列性能。
考虑到Tx通道,虚拟阵列的窄3dB波束宽度在方位面为0.78◦,俯仰为3.6◦,如图4(d)所示。在虚拟MIMO阵列中,俯仰方向的间隙被填充,(a)中的两个主副瓣消失。整体SLL降低到- 15 dB,并进一步降低到FoV边缘。因此,没有主要副瓣干扰整个二维角度谱,见(e)。如图4(f)所示,虚拟阵列与接收阵列具有相同的无模糊区域,但由于虚拟通道数较高,其最大SLL明显较低。
以相同网格的URA跨越85.2λ0×14.8 λ0的虚拟孔径需要4563个虚拟通道。因此,1728个可用的虚拟通道对应于38%的填充因子,这对于稀疏的二维阵列来说是一个很高的值,从而实现了鲁棒的DoA估计。

图4 对优化的接收阵列((a) - (c))和由此产生的虚拟MIMO阵列((d) - (f)进行评估:(a)和(d)显示了方位角和仰角波束方向图,(b)和(e)显示了目标在宽方向上的二维角度估计,(c)和(f)显示了所有二维角度估计的最大SLL,其中突出显示了无模糊区域(![]() )。
)。
D 发射波束形成性能
通过大量的虚拟通道和提出的系统概念,可以启用Tx波束形成,同时虚拟阵列仍然足以执行4D成像。因此,雷达被设计成五种不同的工作模式,如表2所示。使用2 × 2 Tx阵元,可以实现第6种模式的二维波束形成。
元件间距为Δx=2mm和Δz=9mm的2×3 Tx 的URA的概念是将1 (方位)×4 (俯仰)贴片天线作为单个阵元进行操作。这些实现了适度的指向性,同时照亮了完全无模糊的区域。由于没有对天线馈线进行长度匹配以减少线路损耗,因此需要通过校准测量确定各个发射通道之间的相位差,然后进行补偿。补偿可以通过采用雷达MMIC的集成Tx移相器来实现,而无需额外成本。
为了保持较高的虚拟通道数,从而实现4D成像,波束形成(BF)工作模式的方位角或俯仰角结合了两个阵元。为使波束转向某一方位(αsteer)或俯仰(εsteer)方向,两个阵元之间对应的Tx相位差Φ
 (10)
(10)
![]() (11)
(11)
由群因子[32]确定
 (12)
(12)
根据阵元间距d和入射角φ。由于GF中的2因子,在主波束方向上产生3dB的方向增益。此外,Tx功率加倍,因为它是在两个单独的通道中产生的。因此,两种波束形成模式的增益均为6dB。在仰角方向,转向范围是有限的±12.8◦,由于大的阵元间距。尽管如此,这仍然涵盖了3dB波束宽度,因此在这种工作模式下的视场(FoV),参见表2。由于Tx天线组完全被辐射阵元填充,因此不会出现栅瓣。
表2 雷达工作模式概述

3 系统实现
实现的1728通道4D成像雷达演示设备如图5(a)所示。PCB的背面,如图(b)所示,容纳12个雷达MMIC及其相关的SMD部件,电源和参考时钟分布。在馈通拓扑中选择的RO线的长度导致4 δR的移位。因此,移位可以很容易地纠正,并且循环线性调频MIMO操作[33]也是可能的。如第2.B节所述,仅将天线放置在PCB的正面,见(c)。剩余空间采用[34]中介绍的低雷达截面(RCS)结构填充,以平衡顶层和底层的铜分配,从而保证可制造性。
图5 实现的4D成像雷达:(a)尺寸为262mm × 272mm × 85mm的演示器照片,(b)尺寸为250mm × 195mm的组装PCB背面,(c) PCB正面的天线前端,硬件孔径为184mm × 40.5mm。
在图6(a)中,显示了单个天线的近景。每个天线在仰角方向上由4个贴片组成,用于场景照射,天线增益为12.4 dBi。10dB波束宽度在方位角方向为130◦,在仰角方向为36◦,如图6(b)的天线方向图所示。在方位角方向上,采用寄生贴片增强带宽,完全覆盖76GHz ~ 81GHz工作范围。4个主贴片分别在L02层贴片与L03层串行贴片之间采用H型耦合孔进行馈电(见图2)。贴片间距优化为2.15mm,便于向板边方向辐射。
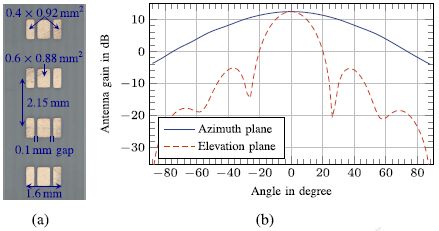
图6 实现了L03层馈电、L02层H型耦合孔径、顶层寄生阵元为1 × 4微带贴片天线的天线单元:(a)照片和(b)天线增益。
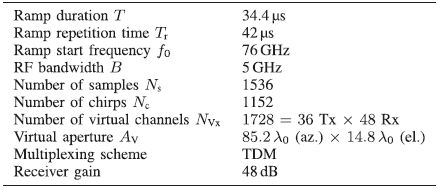
Xilinx Zynq MPSoC用于控制系统并收集48个接收数据流,总数据速率为28.8Gbit/s。通过集成路由器,雷达传感器可以通过WiFi、LAN或WAN连接进行控制。雷达的所有构建模块都提供相同的12至20v线路,可以与电池组或车辆进行独立测量。本文测量中使用的雷达参数汇总如表3所示。在此设置下,由于利用了雷达MMIC的5GHz全带宽,因此最大距离为23米,距离分辨率为3厘米。雷达参数可按[27]变化。
表3 文章使用的雷达参数概述
所有Rx通道的原始时间数据使用常规距离-多普勒处理[28]。然后,校正馈通拓扑导致的距离偏移(参见第II.A节),提取感兴趣的距离多普勒单元的导向矢量[35],进行2D DoA估计[6],获得场景的4D信息。
4 雷达测量验证
通过对已知目标的测量,验证了雷达传感器的性能。为了确定噪声功率,计算所有测量坡道的标准差[36]。在距离频谱中,显示1728次二维傅里叶变换(FTs)结果的非相干积累用于目标提取[35]。
A 检测性能
通过对自由空间的测量来验证检测性能,如图7所示。所采用的FMCW雷达系统的热噪声功率PN,th[37]为
 (13)
(13)
玻尔兹曼常数kB,标准噪声温度T0,斜坡持续时间T。当Rx增益为48dB时,雷达收发器噪声系数为11 dB[27]。最终,中频(IF)频谱噪声功率为- 70 dBm,与图7所示的测量结果完全吻合。可以看出,小距离和大距离的噪声功率都有所降低。这是由于中频高通滤波器抑制强Tx-Rx泄漏和抗混叠低通滤波器的影响。
对于大于1.5m的距离,距离谱完全没有杂散检测。由于馈通拓扑和(4)的指数校正,在Tx-Rx发生泄漏后,可以看到四个峰值。在第4距离单元和ΔiR, FTT = 4处可以看到主泄漏峰,根据(3),最坏的情况是移到iR, Rx = - 16。由于实际采样和+20个距离单元的校正,预测最远的Tx-Rx泄漏峰在iR,corr=36处可见,对应的距离为1.08m。然而,在图7所示的测量中,在1.2m处可以看到最后一个Tx-Rx泄漏峰。这种不匹配是由MMIC中额外的时间延迟引起的。因此,实际测量的ΔiR, FTT等于4.5。如果在不加零的情况下进行校正,由于必要的舍入,会发生可忽略不计的功率损失[26]。
为了进一步验证性能,采用如图8(a)所示的测量设置:在距离雷达4.89m的微波暗室中测量直径为24.8 cm, RCS为σ = - 13 dBsm的球体。相应的距离谱和距离多普勒图像分别如图(b)和(c)所示。球体的检测信噪比为33 dB,相对于−80 dBm的二维 FT噪底。在2米至5.5米的距离内,检测到的腔室侧壁信噪比高达20 dB,在6米左右的位置可见到的后壁信噪比高达27 dB。距离-多普勒频谱的其余部分没有任何虚假或幽灵目标。
接收功率PRx可以用雷达方程[38]估计,
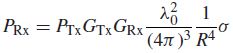 (14)
(14)
其中发射功率PTx,发射和接收增益分别为GTx和GRx。对于球体,这导致接收功率为-44.8 dBm, PTx = 13 dBm[27],天线增益为12.4 dBi,接收器增益为48 dB。此外,考虑了每个垂直过渡的2dB损耗和每个天线馈线的2.5dB平均损耗。这与图8(b)中观测到的- 46.8dBm的测量值非常吻合。

图7 雷达测量进入自由空间。在0.3m和1.2m之间的四个峰是由于应用距离校正而出现的。
B DOA估计性能
在图8(d)所示的二维DoA估计中,可以看到六个副瓣,其SLL略高于图4(e)所示的仿真阵列。考虑到图8(e)所示的可拆卸后壁阵元(![]() )的二维DoA估计结果表明,由于低SLL,该扩展目标的形状和尺寸都可以得到很好的估计。此外,测量的角尺寸在方位角和仰角均为10◦左右,距离为5.9m,估算尺寸与实际尺寸1m × 1m吻合较好。
)的二维DoA估计结果表明,由于低SLL,该扩展目标的形状和尺寸都可以得到很好的估计。此外,测量的角尺寸在方位角和仰角均为10◦左右,距离为5.9m,估算尺寸与实际尺寸1m × 1m吻合较好。
最后,通过图8(f)所示的测量场景的距离-方位切片来验证系统的高分辨率成像能力。由于球体的测量功率水平大大超过(f)中的轴刻度,因此可以看到SLL为30 dB的旁瓣。腔室的宽度(4米)和长度(6.2米)都清晰可辨。此外,由于在距离和角度上具有很高的分离能力,甚至可以区分侧壁上所有28排较大的吸收器尖端。此外,可以识别可拆卸的后墙和区分后墙。
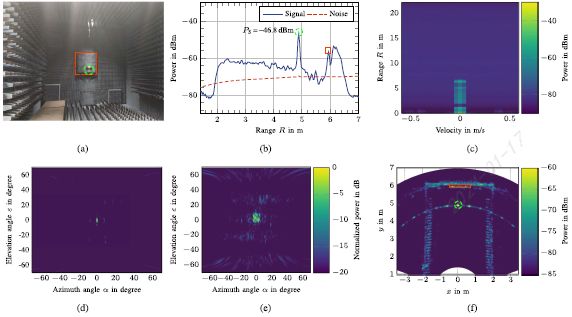
图8 暗室中直径为24.8cm的球体(![]() )在可拆卸后壁阵元(
)在可拆卸后壁阵元(![]() )前距离4.89m处的雷达测量:(a)场景照片,(b)距离谱,(c)距离-多普勒图,(d)球面板侧方向二维角度估计,(e)可拆卸后壁阵元二维角度估计,(f)处理后四维雷达图像的方位角切片。
)前距离4.89m处的雷达测量:(a)场景照片,(b)距离谱,(c)距离-多普勒图,(d)球面板侧方向二维角度估计,(e)可拆卸后壁阵元二维角度估计,(f)处理后四维雷达图像的方位角切片。
C 角度分离
在图9(a)和(d)中,显示了在5m距离处测量的RCS为-5 dBsm的角反射器的角度谱。这些测量分别在方位角和仰角平面验证了理论波束宽度的0.78◦和3.6◦。为了显示角度分离能力,分别在图9(b)和(e)中描述了仅在方位角或俯仰角上相距大约波束宽度的两个近距离目标的测量结果。结果表明,两个角反可以在同一距离多普勒单元中分离,并且角度谱上的陷波最小。对应的DoA估计结果分别如(c)和(f)所示。

图9 测量同一距离多普勒单元中一个或两个目标的角度光谱,验证方位面((a) - (c))和仰角面((d) - (f))的角度可分性:(a)和(d)为单个目标估计的波束宽度,(b)和(e)为估计两个目标的角度可分性,(c)和(f)为相应的二维角度估计。
D TX波束形成能力
首先通过侧向波束验证基本的Tx波束形成能力。在Tx相位校准后,使用图8(a)的测量设置进行测量,以将Tx相位差Φ校正为零。在宽角度范围内测量球体,在所有虚拟通道上平均接收功率,得到方位面和仰角面的双向天线方向图,分别如图10(a)和(b)所示。与标准模式相比,在两个平面上的方位角(--)和仰角(-.-.)波束形成模式都实现了6 dB的预期增益。此外,该增益适用于仰角波束形成模式下的整个方位角平面和方位角波束形成模式下的整个仰角平面,因为在这两种情况下,各自平面上的补丁数量与标准情况相同。同样,对于方位角波束形成模式,波束宽度在方位角平面上减小,而对于仰角波束形成模式,波束宽度在仰角平面上减小。在所有模式下,实现的增益取决于天线单元的总数,如表2所示。中程和远程模式的测量增益分别为9.3 dB和15.3dB,与预期增益仅相差0.7 dB。在相应平面上天线阵元数相同的情况下,曲线级数和波束宽度相同,在远程情况下波束最窄,增益最高。
此外,还验证了两种转向波束的波束形成能力:在方位波束形成情况下,αsteer=−30◦,Φα =π/2;在仰角波束形成情况下,εsteer= 7.5◦,Φε =−0.59π。测量的波束如图10(c)所示,其中方向增益适用于非波束形成情况下的双向模式,例如在-30◦的方位角:−2.2 dB (—图(a)) + 6dB = 3.8dB (--图(c))。因此,测量到的最大值在−17.5◦可见,大小为5.1 dB。同样适用于仰角波束形成的情况下,最大可见在4.5◦与4.5 dB的幅度。当波束转向时,必须考虑理论和测量的转向角之间的这种变化,因为它减小了转向范围。

图10 测量的双向辐射方向图归一化到标准模式(—)的最大增益:(a)方位角,(b)仰角面,(c)波束在方位角方向为- 30◦(--),仰角方向为7.5◦(-.-.)。
5 汽车场景测量
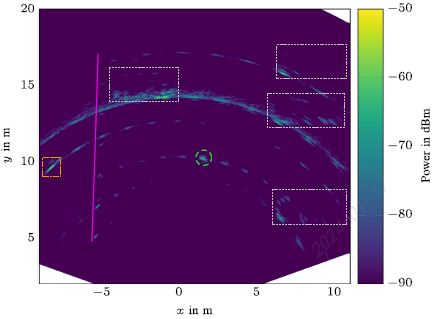
最后,雷达测量在停车场进行,代表典型的汽车场景。观测到的平稳情景如图11(a)所示。静止场景对雷达来说更具挑战性,代表了高分辨率成像雷达的一个corner case。
对图11(b)和(c)所示测量结果的研究证实,即使是典型的弱雷达目标,如视场边缘的行人或木栅栏,也可以在距离-多普勒图(b)的侧视图中识别出来。(c)所示的方位角切片给出了评估场景的详细图像。对于距离传感器最近的三辆汽车,可以看到汽车的特征L形。汽车的长度和宽度都可以估计出来。由于最近的汽车在大方位角可见,由于双向天线方向图边缘的衰减,在汽车前方检测到的散射中心较少。然而,由于在汽车后部检测到大量的散射中心,因此可以高精度地估计其宽度。最远的那辆车被较近的那辆遮住了,所以只能检测到这辆车的后部。
由于垂直极化天线,相对于水平轨道,栅栏的垂直立柱被检测到的信噪比更大。因此,栅栏可以被识别为距离-方位切片直线上的单个散射体。行人和路灯都是可见的大信噪比点目标。尽管存在副瓣,但该传感器能够从观测场景的单个快照生成详细的高分辨率图像,而不需要像合成孔径雷达或网格图那样进行多次测量和复杂的后处理,如图[39]所示。

(a)

(b)
(c)
图11 停车场作为汽车场景的测量:(a)照片,(b)距离-多普勒图的侧视图,(c)处理后的4D雷达图像的方位角切片。停放的汽车被高亮显示为(![]() ),行人被高亮显示为(
),行人被高亮显示为(![]() ),路灯被高亮显示为(
),路灯被高亮显示为(![]() ),栅栏被高亮显示为(—)。
),栅栏被高亮显示为(—)。
6 结论
本文提出了一种新的高分辨率4D成像雷达设计方案。基于混合馈通和配电网拓扑结构,实现了一个包含12个MMIC的系统。通过这种方式,一个系统实现了36个Tx和48个Rx通道,从而产生1728个虚拟通道,这超过最先进的通道数的9倍。结果表明,利用二维最大SLL矩阵,可以方便地评估二维天线阵列的四维模糊函数,从而评估无模糊区域和SLL,从而简化了天线阵列的设计。
提出了一种新颖的PCB概念,将所有组件组装在背面,RF信号分布在埋地层中,仅在正面安装天线,以最大限度地减少来自MMIC或RF传输线的寄生辐射,并允许将天线任意放置在靠近MMIC的位置。MIMO天线阵列设计用于实现Tx波束形成,并通过实现具有交错Tx和Rx通道的稀疏阵列来保持RF传输线长度较短。
该雷达的虚拟孔径在方位角上覆盖85.2 λ0,在仰角平面上覆盖14.8 λ0,无模糊区域为130◦× 75◦,最大SLL为−15 dB。由于传感器的3dB波束宽度为0.78◦× 3.6◦,两个目标的角度距离分别为0.9◦或4◦的方位角或仰角可以分开。填充系数为稀疏阵列的38%,即使在低信噪比或扩展目标的多个散射中心等恶劣条件下,也可以进行鲁棒的DoA估计。通过显示微波暗室的单个吸收器尖端可以在距离-方位切片中被检测和分离,举例说明了在距离和角度上突出的灵敏度和分辨率。如汽车停车场场景所示,单次雷达测量可以获得详细的高分辨率图像。所提出的系统的可获得的雷达图像具有高水平的细节和质量,可与网格地图或合成孔径雷达图像相媲美,因此仅通过一次测量就提供了前所未有的信息密度。