AI嵌入式K210项目(11)-SPI Flash读写
文章目录
- 前言
- 一、K210的SPI
- 二、Flash介绍
- 三、实验过程
- 总结
前言
这一章我们来学习下SPI及其应用,SPI 是一种高速的,全双工,同步的通信总线,由于其高速、同步和简单的特性,被广泛应用于各种微控制器和外围设备之间的通信场景,如:EEPROM和Flash存储器、实时时钟(RTC)、数模转换器(ADC)、网络控制器、数字信号处理(DSP)、数字信号解码器;
一、K210的SPI
串行外设接口有 4 组 SPI 接口,其中 SPI0、SPI1、SPI3 只能工作在 MASTER 模式,SPI2 只能工作在SLAVE 模式,他们有如下特性:
• 支持 1/2/4/8 线全双工模式
• SPI0、SPI1、SPI2 可支持 25MHz 时钟(待测更新)
• SPI3 最高可支持 100MHz 时钟(待测更新)
• 支持 32 位宽、32BYTE 深的 FIFO
• 独立屏蔽中断 - 主机冲突,发送 FIFO 溢出,发送 FIFO 空,接收 FIFO 满,接收 FIFO 下溢,接收 FIFO 溢出中断都可以被屏蔽独立
• 支持 DMA 功能
• 支持双沿的 DDR 传输模式
• SPI3 支持 XIP
对应的头文件 spi.h
为用户提供以下接口
• spi_init
• spi_init_non_standard
• spi_send_data_standard
• spi_send_data_standard_dma
• spi_receive_data_standard
• spi_receive_data_standard_dma
• spi_send_data_multiple
• spi_send_data_multiple_dma
• spi_receive_data_multiple
• spi_receive_data_multiple_dma
• spi_fill_data_dma
• spi_send_data_normal_dma
• spi_set_clk_rate
• spi_handle_data_dma
二、Flash介绍
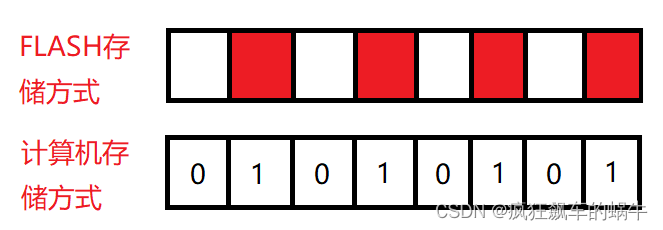
FLASH 芯片是应用非常广泛的存储材料,与之对应的是RAM芯片,区别在于FLASH芯片断电后数据可以保存,而RAM芯片断电后数据不会保存。那么FLASH是如何工作的呢?计算机的储存方式是二进制,也就是0和1,在二进制中,0和1可以组成任何数。FLASH芯片对0和1的处理方式是用物质填充,1则填充,0则不填充,如下图所示,这样就算断电之后,物质的性质也不会因为没有电而改变,所以再次读取数据的时候数据依然不变,这样就可以做到断电保存。
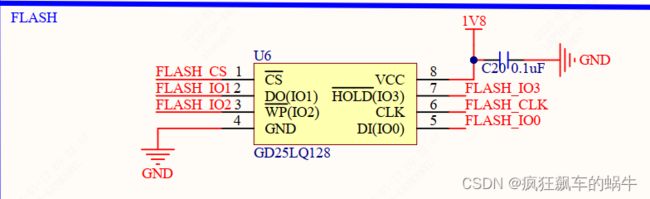
开发板使用的flash芯片GD25LQ128C是通过SPI串行闪存的芯片,具有128M-bit(16兆字节MByte)空间,能够储存声音、文本和数据等,设备运行电源为2.7V~3.6V,低功耗模式电流低至1uA。
写数据,每次向GD25LQ128C写入数据都需要按照页或者扇区或者簇为单位进行,一页为256个字节,一个扇区为4K个字节(16页),一次最多写一页,也就是一次最多写256个字节,如果超过一页数据长度,则分多次完成。
读数据,可以从任何地址读出。
擦除数据,最小单位为一个扇区,也可以直接擦除整个flash芯片。
flash使用的是SPI的通讯方式,所以对应的头文件是spi.h,而由于各家flash芯片存在差异,往往导致适配起来会存在一定问题,所以kendryte官方对市面上常用的flash做了一些库,对应的头文件是w25qxx.h。
为用户提供以下接口:
• w25qxx_init:初始化flash芯片,主要是设置SPI的设备、通道和速率等。
• w25qxx_read_id:读取flash的ID。
• w25qxx_write_data:向flash写入数据。
• w25qxx_read_data:从flash读取数据。
这里可能部分同学会感觉很疑惑,为什么前面提供了SPI的接口,这里又提供了一些那?可以这样理解,这些接口是对上面那么多接口的封装,简化;这些接口最终还是会调用SPI的标准接口,这样做主要目的还是简化开发者的工作量;
硬件连接:

三、实验过程
这个实验我们实现对通过SPI接口对flash芯片进行读写操作,新建flash文件夹,新建main.c文件,然后将w25qxx.h和w25qxx.c放进去
w25qxx.c
/* Copyright 2018 Canaan Inc.
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
#include "w25qxx.h"
#include "fpioa.h"
#include "spi.h"
#include "sysctl.h"
#include "dmac.h"
#include w25qxx.h
/* Copyright 2018 Canaan Inc.
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
#ifndef _W25QXX_H
#define _W25QXX_H
#include main.c
/**
* @file main.c
* @brief flash实验
* @details
* @par History 见如下说明
*
* version: V1.0: 先向flash写入数据,然后读取出来,对比写入和读取的数据是否一致,
* 如果不一致则打印错误信息。
*/
#include 代码写好后,我们开始编译,注意:如果你编译过程中出现错误,可以先make clean掉之前生成的过程文件,重新生成
cd build
//注意这里的目标文件目录改成flash,和刚才新建的文件夹名称一致
cmake .. -DPROJ=flash -G "MinGW Makefiles"
make
编译完成后,在build文件夹下会生成flash.bin文件。
使用type-C数据线连接电脑与K210开发板,打开kflash,选择对应的设备,再将程序固件烧录到K210开发板上。

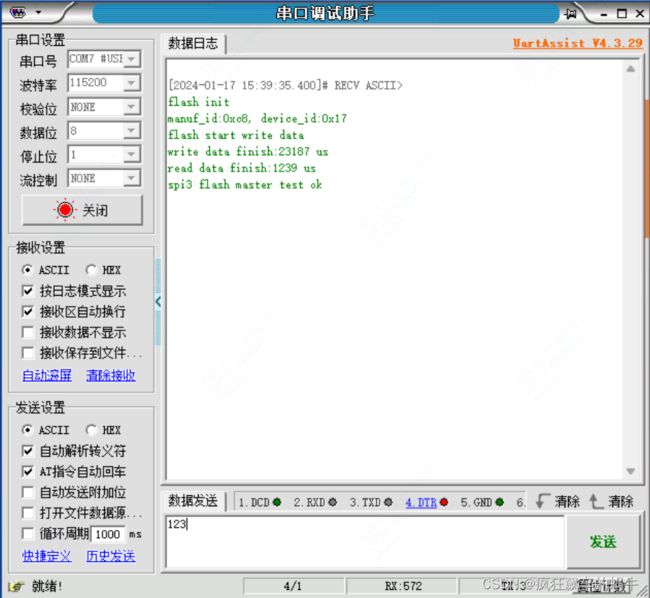
实验结果如下:
总结
本章介绍了SPI相关内容,开发板使用的Flash芯片GD25LQ128C的一款存储空间为16MB的FLASH芯片,总共有4096个扇区,每个扇区有16页,每页是256字节,FLASH是能够断电保存数据的一种储存方式。