ROS中生成CameraInfo消息
前言
由于某个第三方代码需要接受CameraInfo消息,我换了一个相机以后,需要自己发布CameraInfo消息。网上搜了半天,很少有介绍CameraInfo这些数据都是怎么来的的资料,可能大部分都是直接生成的吧,像我这样需要自己计算的可能不多。折腾了半天,也算是找到了方法。特做记录总结。转载请注明出处。
分析
首先看一下现有的CameraInfo有哪些数据:
rostopic echo /camera_info

可以看到,除了header外有 D, K, R, P等参数。这几个都是什么?
这就需要看一下在ros官网的说明:
http://docs.ros.org/en/melodic/api/sensor_msgs/html/msg/CameraInfo.html
一篇关于这个官方说明的资料在这里:https://github.com/dimatura/ros_vimdoc/blob/master/doc/ros-camera-info.txt
可以看出,D是畸变参数,K是相机内参矩阵,R是旋转,P是(校正后的)投影矩阵。
计算
进过相机标定后,一般都能够获得K和D,但R和P怎么设置?
一般我们不需要图像进行旋转,所以R给单位阵就好。P可以看到,P和K并不是完全相同。可以说,如果是没有畸变的图像,那么P左半部分和K是相同的。那么P该如何计算?找到了这个帖子:https://answers.ros.org/question/119506/what-does-projection-matrix-provided-by-the-calibration-represent/(可能访问不了,贴图到这里)
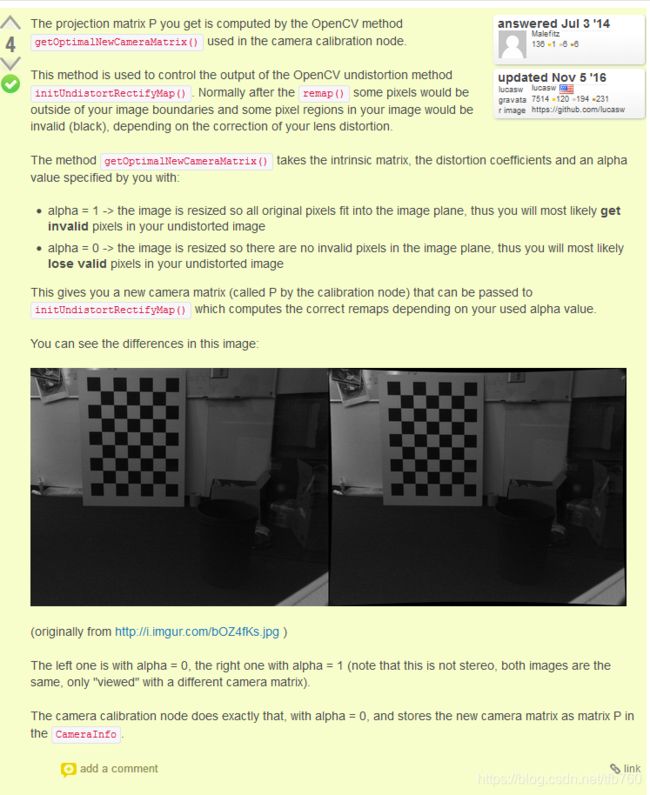
所以可以用OpenCV的函数getOptimalNewCameraMatrix()计算。函数API说明
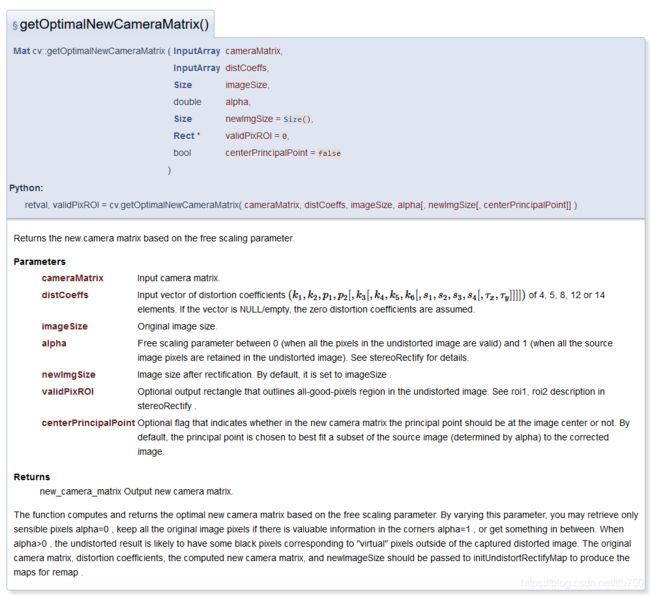 只需要设置相机内参矩阵、畸变参数、长宽,alpha是自行设定,但根据ROS中cameraInfo,应该设置为0。
只需要设置相机内参矩阵、畸变参数、长宽,alpha是自行设定,但根据ROS中cameraInfo,应该设置为0。
代码
测试代码如下:
void ex(void){
cout << "camera info parameter..." << endl;
Mat dst;
Mat cameraMatrix = Mat::zeros(Size(3,3), CV_64FC1);
Mat distCoeffs(Size(1,4), CV_64FC1);
cameraMatrix.at<double>(0,0) = 199.0923665423;
cameraMatrix.at<double>(0,2) = 132.1920713777;
cameraMatrix.at<double>(1,1) = 198.8288204701;
cameraMatrix.at<double>(1,2) = 110.7126600011;
cameraMatrix.at<double>(2,2) = 1;
distCoeffs.at<double>(0) = -0.36843631179;
distCoeffs.at<double>(1) = 0.150947243556;
distCoeffs.at<double>(2) = -0.00029613053;
distCoeffs.at<double>(3) = -0.00075943173;
// distCoeffs.at(4) = 0.0;
dst = getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, Size(240, 180), 1);
cout << dst << endl;
}
测试结果看,自己计算的P和原始数据的P基本相同吧。

完整代码
由于ROS的cameraInfo下D/R/P/K并不是opencv的Mat,所以需要进行转换。完整代码如下:
sensor_msgs::CameraInfo getCameraInfo(void){ // extract cameraInfo.
sensor_msgs::CameraInfo cam;
string camera_model_file = "/home/larrydong/thesis_ws/src/thesis/process/settings/parameters.xml";
FileStorage fs(camera_model_file, FileStorage::READ);
if(!fs.isOpened()){
ROS_ERROR_STREAM("Cannot load camera info file. From: " << camera_model_file);
}
Mat k, d;
fs["camera_matrix"] >> k;
fs["distortion_coefficient"] >> d;
vector<double> D{d.at<double>(0), d.at<double>(1), d.at<double>(2), d.at<double>(3), d.at<double>(4)};
boost::array<double, 9> K = {
k.at<double>(0), k.at<double>(1), k.at<double>(2),
k.at<double>(3), k.at<double>(4), k.at<double>(5),
k.at<double>(6), k.at<double>(7), k.at<double>(8),
};
Mat p = getOptimalNewCameraMatrix(k, d, Size(1280, 800), 0); // get rectified projection.
boost::array<double, 12> P = {
p.at<double>(0,0), p.at<double>(0,1), p.at<double>(0,2), p.at<double>(0,3),
p.at<double>(1,0), p.at<double>(1,1), p.at<double>(1,2), p.at<double>(1,3),
p.at<double>(2,0), p.at<double>(2,1), p.at<double>(2,2), p.at<double>(2,3)
};
boost::array<double, 9> r = {1, 0, 0, 0, 1, 0, 0, 0, 1};
cam.height = 800;
cam.width = 1280;
cam.distortion_model = "plumb_bob";
cam.D = D;
cam.K = K;
cam.P = P;
cam.R = r;
cam.binning_x = 0;
cam.binning_y = 0;
return cam;
}
int main(int argc, char **argv){
ros::init(argc, argv, "image_info_pub");
ros::NodeHandle n;
const string camurl = "file:///home/yjy/calibrationdata/ost.yaml";
camera_info_manager::CameraInfoManager caminfo(n, "camera_info", camurl);
ros::Publisher pub_cam_info = n.advertise<sensor_msgs::CameraInfo>("camera_info", 1);
ros::Rate r(10);
while(ros::ok()){
pub_cam_info.publish(caminfo.getCameraInfo());
ros::spinOnce();
r.sleep();
}
return 0;
}