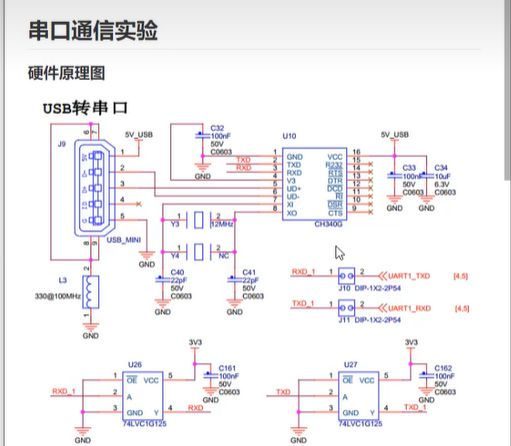
IMX6LL|串口通信
相关寄存器
-
UART1时钟源
- CCM_CSCDR1
-
初始化 UART1
-
UART1_UCR1:使能uart1、自动波特率
-
UART1_UCR2:设置串口的发送帧格式
-
奇偶校验位、软件复位
-
数据长度
-
发送完成标志、数据接受标志
-
发送使能、接收使能
-
-
UART1_UCR3:bit2置1,官方要求设置
-
UART1_UFCR:时钟分频、发送与接收的 fifo大小
-
UART1_UBIR、UART1_UBMR:波特率
-
- 收发数据
- UART1_UTXD :发送一个字符
- UART1_URXD :接受一个字符
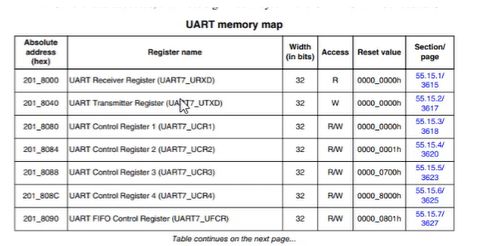
55.15 UART Memory Map/Register Definition
makefile修改
官方sdk的设置波特率函数使用了除法,需要提供gcc除法库
LIBPATH := -lgcc -static -L/usr/lib/gcc/arm-none-eabi/6.3.1
-
-lgcc 表示会链接“libgcc.a”库
-
-static -L 表示静态库所在路径
代码:
#include "uart.h"
void uart_init(void)
{
/*时钟初始化,设置 UART 根时钟,并设置为40MHz*/
CCM->CSCDR1 &= ~(0x01 << 6); //设置UART选择 PLL3 / 6 = 80MHz
CCM->CSCDR1 &= ~(0x3F); //清零
CCM->CSCDR1 |= (0x01 << 0); //设置串口根时钟分频值为1,UART根时钟频率为:80M / (dev + 1) = 40MHz
//禁用 UART1
UART1->UCR1 &= ~UART_UCR1_UARTEN_MASK;
/*软件复位*/
UART1->UCR2 &= ~UART_UCR2_SRST_MASK;
while ((UART1->UCR2 & UART_UCR2_SRST_MASK) == 0)
{
}
/*引脚初始化*/
IOMUXC_SetPinMux(IOMUXC_UART1_RX_DATA_UART1_RX, 0);
IOMUXC_SetPinConfig(IOMUXC_UART1_RX_DATA_UART1_RX, 0x10b0);
IOMUXC_SetPinMux(IOMUXC_UART1_TX_DATA_UART1_TX, 0);
IOMUXC_SetPinConfig(IOMUXC_UART1_TX_DATA_UART1_TX, 0x10b0);
/*******uart初始化******/
/*设置控制寄存器到默认值*/
UART1->UCR2 |= (1 << 5); //8位数宽度
UART1->UCR2 &= ~(1 << 6); //一位停止位
UART1->UCR2 &= ~(1 << 8); //禁用奇偶校验位
UART1->UCR2 |= (1 << 2); //使能发送
UART1->UCR2 |= (1 << 1); //使能接收
UART1->UCR2 |= (1 << 14); //忽略流控
/* For imx family device, UARTs are used in mode, so that this bit should always be set.*/
UART1->UCR3 |= UART_UCR3_RXDMUXSEL_MASK;
//UART1->UFCR = (UART1->UFCR & ~UART_UFCR_TXTL_MASK) | UART_UFCR_TXTL(1); //设置发送FIFO 阀值
//UART1->UFCR = (UART1->UFCR & ~UART_UFCR_TXTL_MASK) | UART_UFCR_TXTL(1); //设置接收FIFO 阀值
UART1->UCR1 &= ~UART_UCR1_ADBR_MASK; //禁用可变波特率
/*波特率设置方式 1 。 使用官方SDK设置波特率函数*/
UART_SetBaudRate(UART1, 115200, 40000000); //第三个参数是串口的时钟频率
#if 0
/*波特率设置方式 2 。 手动计算,填入寄存器*/
/*设置串口波特率
* Ref Freq时钟 40MHz
* UFCR RFDIV 110 0x06 7分频 5.714MHz
* BaudRate 115200bps
* UBMR 31-1 = 0x09
* UBIR 10-1 = 0x1E
*/
UART1->UFCR &= ~(0x07 << 7); //清零分频值
UART1->UFCR |= (0x06 << 7); //设置分频值,40MHz /7 = 5.714MHz
UART1->UBIR = 0x09;
UART1->UBMR = 0x1E;
#endif
/*开启串口*/
UART1->UCR1 |= UART_UCR1_UARTEN_MASK;
}
/*!
* 功能:官方SDK 串口字符串读取函数
* @brief Reads the receiver register.
*
* This function is used to read data from receiver register.
* The upper layer must ensure that the receiver register is full or that
* the RX FIFO has data before calling this function.
*
* @param base UART peripheral base address.
* @return Data read from data register.
*/
static inline uint8_t UART_ReadByte(UART_Type *base)
{
return (uint8_t)((base->URXD & UART_URXD_RX_DATA_MASK) >> UART_URXD_RX_DATA_SHIFT);
}
/*函数功能:串口接收函数
*参数: base,指定串口。data,保存接收到的数据。 length,要接收的数据长度
*
*/
void UART_ReadBlocking(UART_Type *base, uint8_t *data, uint8_t length)
{
while (length--)
{
/* 等待接收完成 */
while (!(base->USR2 & UART_USR2_RDR_MASK))
{
}
/*读取接收到的数据 */
*(data++) = UART_ReadByte(base);
}
}
/*!
* 功能:官方SDK 串口发送函数
* 参数:base,指定串口。data,指定要发送的字节
* This function is used to write data to transmitter register.
* The upper layer must ensure that the TX register is empty or that
* the TX FIFO has room before calling this function.
*/
static inline void UART_WriteByte(UART_Type *base, uint8_t data)
{
base->UTXD = data & UART_UTXD_TX_DATA_MASK;
}
/*
*功能:官方SDK 串口字符串发送函数
*参数说明:
*/
void UART_WriteBlocking(UART_Type *base, const uint8_t *data, uint8_t length)
{
while (length--)
{
/* Wait for TX fifo valid.
* This API can only ensure that the data is written into the data buffer but can't
* ensure all data in the data buffer are sent into the transmit shift buffer.
*/
while (!(base->USR2 & UART_USR2_TXDC_MASK))
{
}
UART_WriteByte(base, *(data++));
}
}
/* 官方SDK 波特率设置函数,
* 修改内容:修改了函数的返回值,波特率设置成功,返回1 。波特率设置失败返回 0
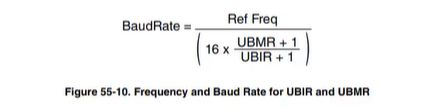
*This UART instantiation uses a slightly different baud rate calculation.
* Baud Rate = Ref Freq / (16 * (UBMR + 1)/(UBIR+1)).
* To get a baud rate, three register need to be writen, UFCR,UBMR and UBIR
* At first, find the approximately maximum divisor of src_Clock and baudRate_Bps.
* If the numerator and denominator are larger then register maximum value(0xFFFF),
* both of numerator and denominator will be divided by the same value, which
* will ensure numerator and denominator range from 0~maximum value(0xFFFF).
* Then calculate UFCR and UBIR value from numerator, and get UBMR value from denominator.
*/
int32_t UART_SetBaudRate(UART_Type *base, uint32_t baudRate_Bps, uint32_t srcClock_Hz)
{
uint32_t numerator = 0u;
uint32_t denominator = 0U;
uint32_t divisor = 0U;
uint32_t refFreqDiv = 0U;
uint32_t divider = 1U;
uint64_t baudDiff = 0U;
uint64_t tempNumerator = 0U;
uint32_t tempDenominator = 0u;
/* get the approximately maximum divisor */
numerator = srcClock_Hz;
denominator = baudRate_Bps << 4;
divisor = 1;
while (denominator != 0)
{
divisor = denominator;
denominator = numerator % denominator;
numerator = divisor;
}
numerator = srcClock_Hz / divisor;
denominator = (baudRate_Bps << 4) / divisor;
/* numerator ranges from 1 ~ 7 * 64k */
/* denominator ranges from 1 ~ 64k */
if ((numerator > (UART_UBIR_INC_MASK * 7)) || (denominator > UART_UBIR_INC_MASK))
{
uint32_t m = (numerator - 1) / (UART_UBIR_INC_MASK * 7) + 1;
uint32_t n = (denominator - 1) / UART_UBIR_INC_MASK + 1;
uint32_t max = m > n ? m : n;
numerator /= max;
denominator /= max;
if (0 == numerator)
{
numerator = 1;
}
if (0 == denominator)
{
denominator = 1;
}
}
divider = (numerator - 1) / UART_UBIR_INC_MASK + 1;
switch (divider)
{
case 1:
refFreqDiv = 0x05;
break;
case 2:
refFreqDiv = 0x04;
break;
case 3:
refFreqDiv = 0x03;
break;
case 4:
refFreqDiv = 0x02;
break;
case 5:
refFreqDiv = 0x01;
break;
case 6:
refFreqDiv = 0x00;
break;
case 7:
refFreqDiv = 0x06;
break;
default:
refFreqDiv = 0x05;
break;
}
/* Compare the difference between baudRate_Bps and calculated baud rate.
* Baud Rate = Ref Freq / (16 * (UBMR + 1)/(UBIR+1)).
* baudDiff = (srcClock_Hz/divider)/( 16 * ((numerator / divider)/ denominator).
*/
tempNumerator = srcClock_Hz;
tempDenominator = (numerator << 4);
divisor = 1;
/* get the approximately maximum divisor */
while (tempDenominator != 0)
{
divisor = tempDenominator;
tempDenominator = tempNumerator % tempDenominator;
tempNumerator = divisor;
}
tempNumerator = srcClock_Hz / divisor;
tempDenominator = (numerator << 4) / divisor;
baudDiff = (tempNumerator * denominator) / tempDenominator;
baudDiff = (baudDiff >= baudRate_Bps) ? (baudDiff - baudRate_Bps) : (baudRate_Bps - baudDiff);
if (baudDiff < (baudRate_Bps / 100) * 3)
{
base->UFCR &= ~UART_UFCR_RFDIV_MASK;
base->UFCR |= UART_UFCR_RFDIV(refFreqDiv);
base->UBIR = UART_UBIR_INC(denominator - 1);
base->UBMR = UART_UBMR_MOD(numerator / divider - 1);
base->ONEMS = UART_ONEMS_ONEMS(srcClock_Hz / (1000 * divider));
return 1;
}
else
{
return 0;
}
}