线性规划案例分享
今天想写一个最优传输的简单实现,结果学歪了,学到线性规划去了,这里我发现了一个宝藏网站
虽然是讲计量经济的,但是里面提供的公式和代码我很喜欢,有时间可以好好读一下
https://python.quantecon.org/lp_intro.html
参考博客
https://docs.scipy.org/doc/scipy/reference/generated/scipy.optimize.linprog.html
https://python.quantecon.org/lp_intro.html
example1
图解法
import numpy as np
from scipy.optimize import linprog
import matplotlib.pyplot as plt
from matplotlib.patches import Polygon
fig, ax = plt.subplots(figsize=(8, 6))
ax.grid()
# Draw constraint lines
ax.hlines(0, -1, 17.5)
ax.vlines(0, -1, 12)
ax.plot(np.linspace(-1, 17.5, 100), 6-0.4*np.linspace(-1, 17.5, 100), color="c")## 画一条直线
ax.plot(np.linspace(-1, 5.5, 100), 10-2*np.linspace(-1, 5.5, 100), color="c") ## 画一条直线
ax.text(1.5, 8, "$2x_1 + 5x_2 \leq 30$", size=12)
ax.text(10, 2.5, "$4x_1 + 2x_2 \leq 20$", size=12)
ax.text(-2, 2, "$x_2 \geq 0$", size=12)
ax.text(2.5, -0.7, "$x_1 \geq 0$", size=12)
# Draw the feasible region
feasible_set = Polygon(np.array([[0, 0],
[0, 6],
[2.5, 5],
[5, 0]]),
color="cyan")
ax.add_patch(feasible_set)
# Draw the objective function
ax.plot(np.linspace(-1, 5.5, 100), 3.875-0.75*np.linspace(-1, 5.5, 100), color="orange")
ax.plot(np.linspace(-1, 5.5, 100), 5.375-0.75*np.linspace(-1, 5.5, 100), color="orange")
ax.plot(np.linspace(-1, 5.5, 100), 6.875-0.75*np.linspace(-1, 5.5, 100), color="orange")
ax.arrow(-1.6, 5, 0, 2, width = 0.05, head_width=0.2, head_length=0.5, color="orange")
ax.text(5.7, 1, "$z = 3x_1 + 4x_2$", size=12)
# Draw the optimal solution
ax.plot(2.5, 5, "*", color="black")
ax.text(2.7, 5.2, "Optimal Solution", size=12)
plt.show()
结果如下,这个图还蛮好看的
python代码 - solution
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import linprog
from quantecon.optimize.linprog_simplex import linprog_simplex
import ot
from scipy.stats import betabinom
import networkx as nx
# Define parameters
# Construct parameters
c_ex1 = np.array([3, 4])
# Inequality constraints
A_ex1 = np.array([[2, 5],
[4, 2]])
b_ex1 = np.array([30,20])
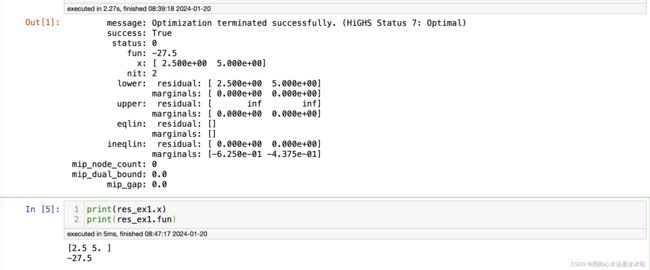
# Solve the problem
# we put a negative sign on the objective as linprog does minimization
res_ex1 = linprog(-c_ex1, A_ub=A_ex1, b_ub=b_ex1)
res_ex1
结果如下
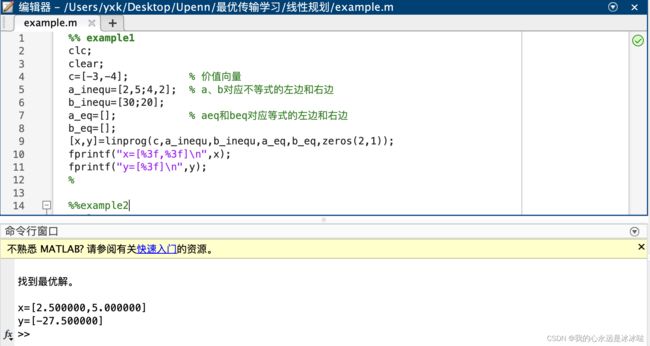
matlab代码-solution
%% example1
clc;
clear;
c=[-3,-4]; % 价值向量
a_inequ=[2,5;4,2]; % a、b对应不等式的左边和右边
b_inequ=[30;20];
a_eq=[]; % aeq和beq对应等式的左边和右边
b_eq=[];
[x,y]=linprog(c,a_inequ,b_inequ,a_eq,b_eq,zeros(2,1));
fprintf("x=[%3f,%3f]\n",x);
fprintf("y=[%3f]\n",y);
%
结果如下
example2
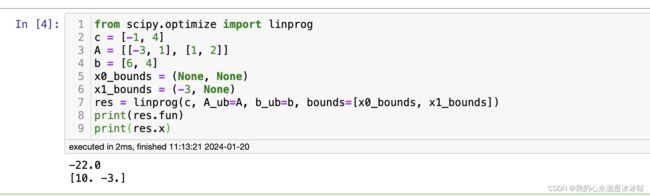
python代码
from scipy.optimize import linprog
c = [-1, 4]
A = [[-3, 1], [1, 2]]
b = [6, 4]
x0_bounds = (None, None)
x1_bounds = (-3, None)
res = linprog(c, A_ub=A, b_ub=b, bounds=[x0_bounds, x1_bounds])
print(res.fun)
print(res.x)
结果如下
matlab代码
%%example2
clc;
clear;
c=[-1,4]; % 价值向量
a_inequ=[-3,1;1,2]; % a、b对应不等式的左边和右边
b_inequ=[6;4];
a_eq=[]; % aeq和beq对应等式的左边和右边
b_eq=[];
lb = [-inf,-3]; % 这里不要写成了lb=[-3,-inf],否则无界
ub =[];
[x,y]=linprog(c,a_inequ,b_inequ,a_eq,b_eq,lb,ub);
fprintf("x=[%3f,%3f]\n",x);
fprintf("y=[%3f]\n",y);

example3
python代码
from scipy.optimize import linprog
import numpy as np
c = [-1,-1/3]
a_inequ = np.array([[1, 1],
[1 ,1/4],
[1 ,-1],
[-1/4, -1],
[-1, -1],
[-1 ,1]])
b_inequ = np.array([2, 1, 2 ,1 ,-1 ,2]);
a_eq =np.array([[1, 1/4]]);
b_eq = np.array([1/2]);
x0_bounds = [-1,1.5];
x1_bounds = [-0.5,1.25];
res = linprog(c, A_ub=a_inequ, b_ub=b_inequ,A_eq=a_eq,b_eq=b_eq, bounds=[x0_bounds, x1_bounds])
print(res.x)
print(res.fun)
结果如下

matlab代码
clc;
clear;
c = [-1 -1/3];
a_inequ = [1 1; 1 1/4;
1 -1; -1/4 -1;
-1 -1;-1 1];
b_inequ = [2 1 2 1 -1 2];
a_eq = [1 1/4];
b_eq = 1/2;
lb = [-1,-0.5];
ub = [1.5,1.25];
[x,y] = linprog(c,a_inequ,b_inequ,a_eq,b_eq,lb,ub);
fprintf("x=[%3f,%3f]\n",x);
fprintf("y=[%3f]\n",y);
 嘿嘿,先到这里吧
嘿嘿,先到这里吧