大数据分析-第十一章 图挖掘-动机,应用和算法
Lecture11-图挖掘-动机,应用和算法
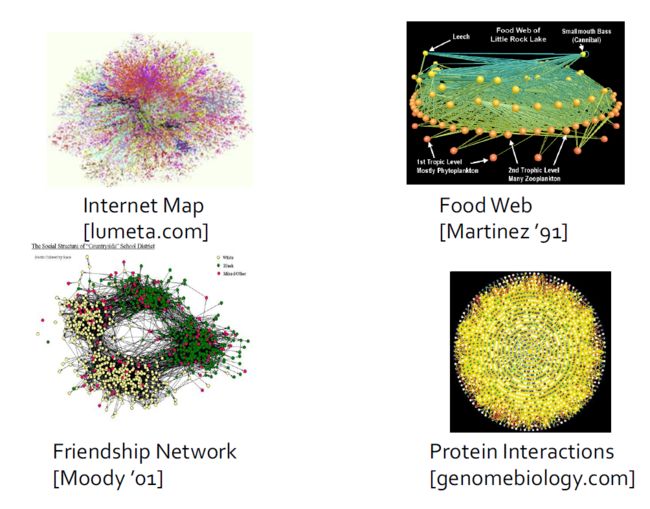
1. 我们为什么会关注图数据
2. 参与的网络和社交媒体
2.1. 传统的媒体
广播:一对多,这些内容都是相对比较专业的

2.2. 社交媒体:多对多关系
交互提供了丰富的关于用户、内容的信息

2.2.1. 社交媒体的特点
- 每个人都可以成为媒体
- 通讯障碍消失
- 丰富的用户互动
- 用户生成的内容
- 用户丰富的内容
- 用户开发的小部件
- 协作环境
- 集体智慧
- 长尾模式
- 广播媒体(过滤,然后发布) -> 社交媒体(发布,然后过滤)
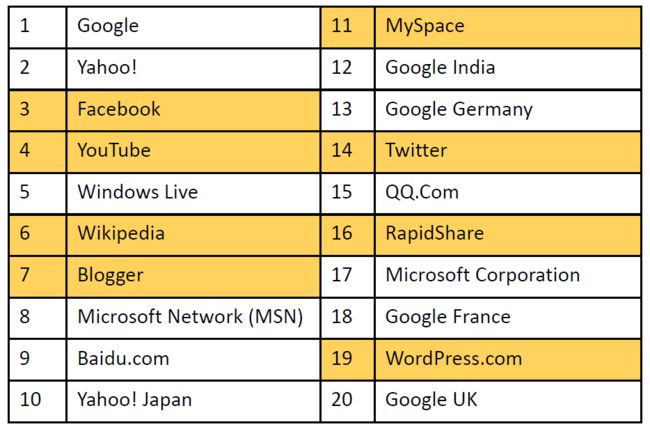
2.2.2. 最经常被访问的20个网页
- 前20个最常被访问的网站中有40%是社交网站
2.2.3. 社交网络有越来越重要的意义
美国大选
2.2.4. 社交网络
- 由节点(个人或组织)组成的社会结构,这些节点通过各种相互依存关系(如友谊,亲属关系等)相互关联。
- 图示
- 节点:成员
- 优势:关系
- 各种实现
- 社交书签(Del.icio.us)
- 友谊网络(facebook,myspace)
- Blogosphere
- 媒体共享(Flickr,Youtube)
- 民间传说
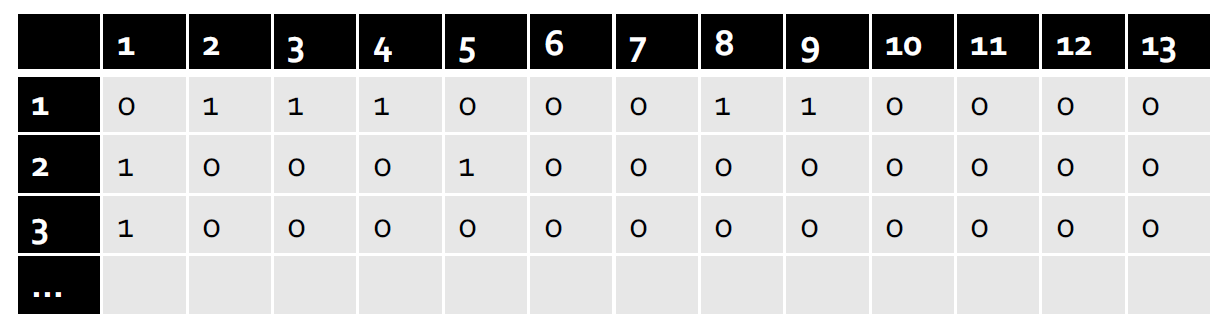
2.3. 社会矩阵
- 社交网络也可以矩阵形式表示
2.4. 社交计算和数据挖掘
- 社会计算涉及基于计算系统的社会行为和社会环境的研究。
- 数据挖掘相关任务
- 集中度分析(中心和重点发现)
- 社团检测
- 分类
- 关联预测
- 病毒式营销
- 网络建模
- 补充:城市计算
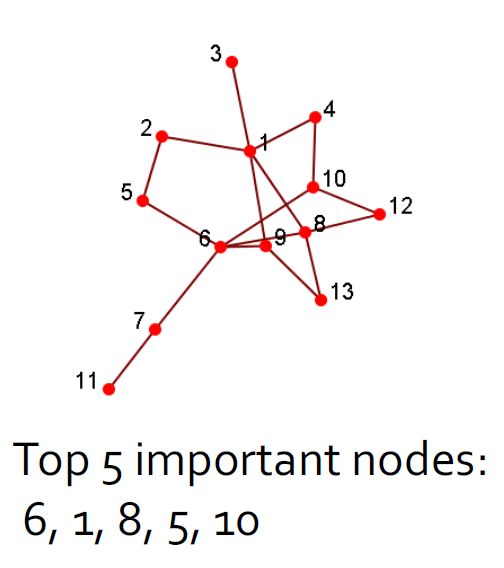
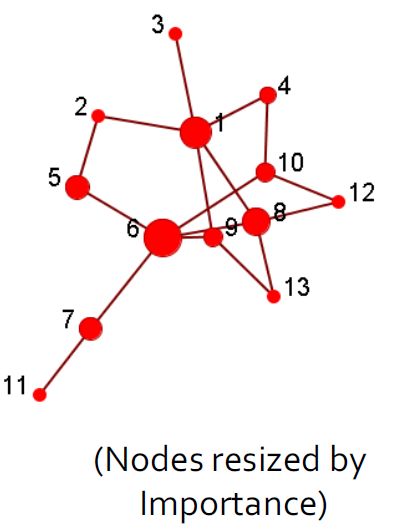
2.4.1. 集中性分析/影响力研究
- 识别社交网络中最重要的参与者
- 给出:一个社交网络
- 输出:顶级节点列表
- 计算出来任意两个节点之间的最近路径,然后计算出每一个节点相对于其他节点的是不是最近节点,得到中心度。
- 或者还可以使用1跳或者xxx来作为判断标准
 |
 |
|---|
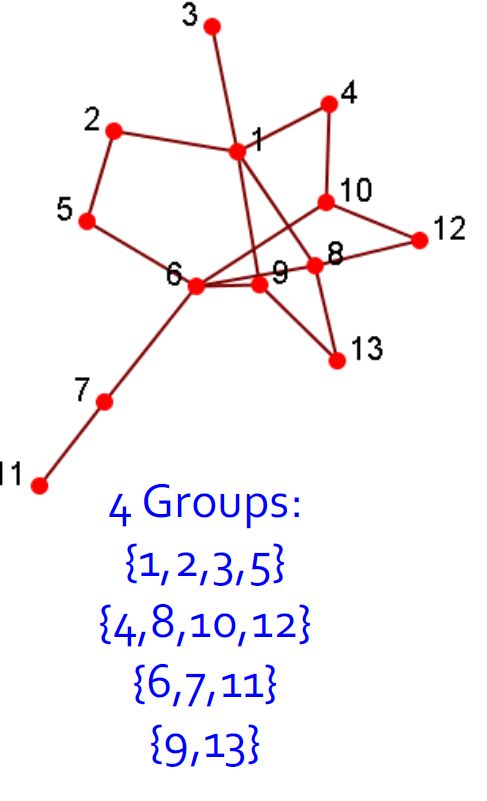
2.4.2. 社团检测(聚类)
- 社团是一组节点,它们之间的交互(相对)频繁(也称为组,子组,模块,集群)
- 社团检测又称分组,聚类,寻找有凝聚力的亚组(社团),有点类似于聚类任务。
- 给出:一个社交网络
- 产出:(一些)演员的社团成员
- 应用
- 了解人与人之间的互动
- 可视化和导航大型网络
- 为其他任务(例如数据挖掘)奠定基础
- 分组后可视化结果
 |
 |
|---|
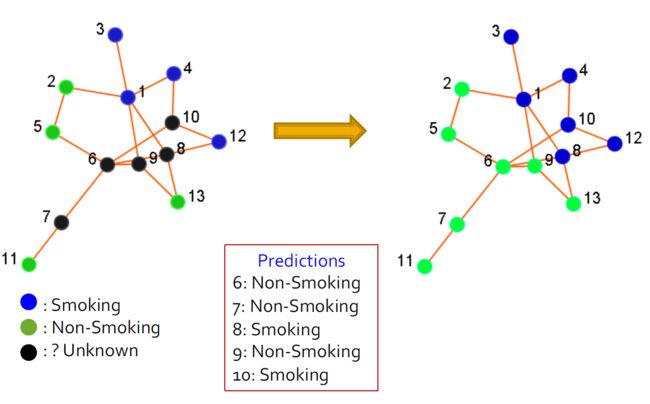
2.4.3. 分类
- 用户首选项或行为可以表示为类标签
- 是否点击广告
- 是否对某些主题感兴趣
- 订阅了某些政治观点
- 喜欢/不喜欢产品
- 输入
- 社交网络
- 网络中一些参与者的标签
- 输出:网络中剩余参与者的标签
- 总结:分类预测后可视化
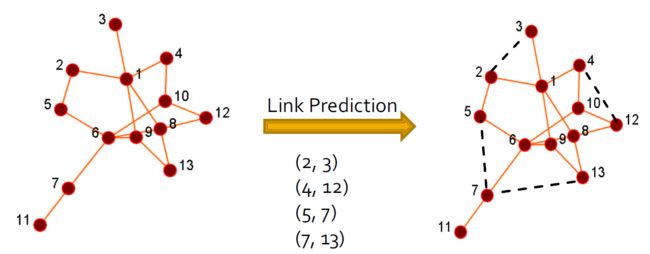
2.4.4. 关联预测
- 给定一个社交网络,预测哪些节点可能会连接
- 输出(排名)节点对的列表
- 示例:Facebook中的朋友推荐
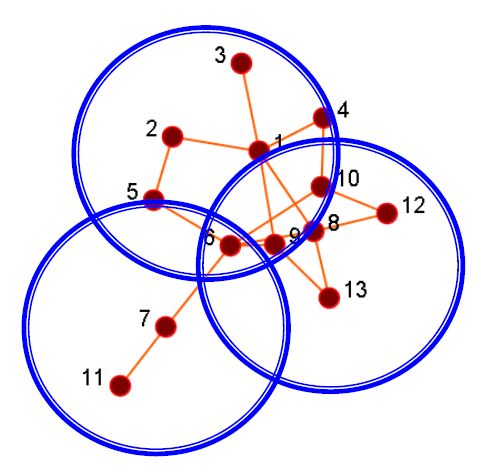
2.4.5. 病毒式营销/爆发检测
2.4.5.1. 什么是病毒式营销/爆发检测
- 用户在社交网络中具有不同的社交资本(或网络价值),因此,人们如何才能最好地利用这一信息?
- 病毒式营销:找出一组用户来提供优惠券和促销以影响网络中的其他人,从而使我的利益最大化
- 爆发检测:监控一组节点,这些节点可帮助检测爆发或中断感染传播(例如H1N1流感)
- 目标:在预算有限的情况下,如何最大程度地提高整体收益?
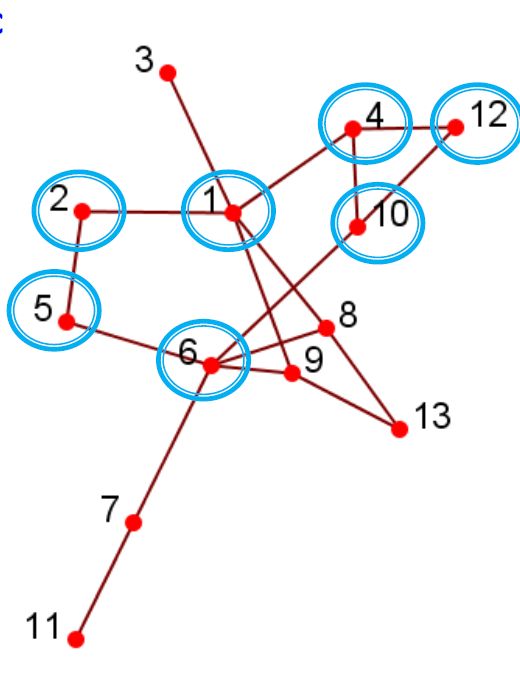
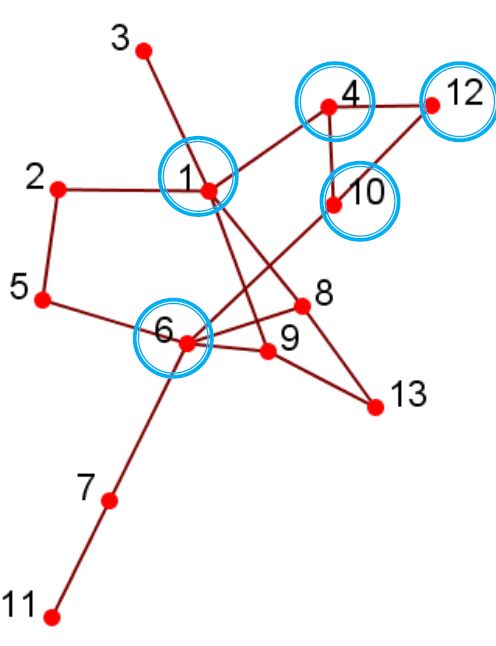
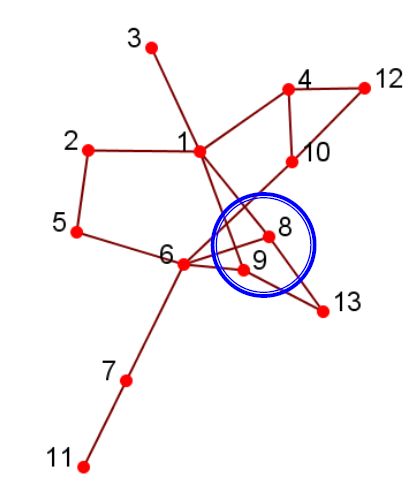
2.4.5.2. 病毒式营销的例子
- 查找节点数量最少的整个节点网络的覆盖范围
- 如何实现它,一个例子:基本贪婪选择:选择使实用程序最大化的节点,删除该节点,然后重复
- 首先选择节点1
- 然后选择节点8
- 最后选择节点7,节点7不是一个有高中心度的结点。
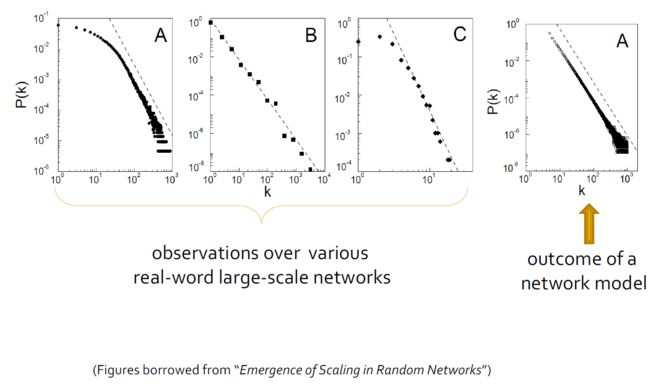
2.4.6. 网络建模
- 大型网络展示了统计模式:
- 小世界效果(例如6度的分离度)
- 幂律分布(又称无标度分布)
- 社团结构(高聚集系数)
- 模拟网络动力学
- 找到一种机制,以便可以复制在大型网络中观察到的统计模式。
- 示例:随机图,优先附着过程
- 用于仿真以了解网络属性
- Thomas Shelling的著名模拟:是什么导致白人和黑人隔离
- 受攻击的网络稳健性
- 二八现象:20%的节点上有着80%的重要性
- 网络模型应用
2.5. 社交计算的应用
- 通过社交网络做广告
- 行为建模和预测
- 流行病学研究
- 协同过滤
- 人群情绪阅读器
- 文化趋势监测
- 可视化
- 健康2.0
3. 社团探测原则
3.1. 社团
- 社团:具有相对牢固,直接,强烈,频繁或积极联系的演员的子集。
- 社团是一组经常相互交流的参与者,例如:参加会议的人
- 一群没有互动的人不是一个社团,例如:人们在车站等公共汽车,却不互相交谈
- 人们在社交媒体中形成社团
3.2. 社团的例子
3.3. 为什么在社交媒体上有社团
- 人是社会的
- 社交媒体中的部分互动是对现实世界的一瞥
- 人们在现实世界以及在线中都与朋友,亲戚和同事保持联系
- 易于使用的社交媒体使人们能够以前所未有的方式扩展社交生活,很难认识现实世界中的朋友,但更容易在网上找到志趣相投的朋友
3.4. 社团探测
- 社团检测:根据社交网络属性正式确定强大的社交群体
- 一些社交媒体网站允许人们加入群组,是否有必要根据网络拓扑提取群组?
- 并非所有站点都提供社团平台
- 并非所有人都参加
- 网络交互可提供有关用户之间关系的丰富信息
- 组是隐式形成的
- 可以补充其他类型的信息
- 帮助网络可视化和导航
- 提供其他任务的基本信息
- 社团定义的主观性

3.5. 社团标准分类
- 条件因任务而异
- 大致上,社团检测方法可分为4类(非排他性):
- 以节点为中心的社团:组中的每个节点都满足某些属性
- 以团体为中心的社团:考虑整个组内的连接。 该组必须满足某些属性,而无需放大节点级别
- 以网络为中心的社团:将整个网络分成几个不相交的集合
- 以等级为中心的社团:构建社团的层次结构
3.5.1. 以节点为中心的社团探测
- 节点满足不同的属性
- 完全互通:clique
- 成员可达性:k-clique,k-clan,k-club
- 节点度:k-plex,k-core
- 内外关系的相对频率:LS集,Lambda集
- 在传统社交网络分析中常用
3.5.1.1. 完全互通:clique
- Clique:三个或更多节点彼此相邻的最大完整子图
- NP-hard问题:以找到网络中的最大clique,直接实现查找clique会是一个非常耗时的操作
- 通常会从clique出发去探索更大的clique
- 递归修剪:
- 从给定网络中采样一个子网,然后通过贪婪的方法在该子网中找到一个clique
- 假设上面的clique大小为k,为了找到更大的clique,应删除度数<= k-1的所有节点。
- 重复上诉操作直到网络足够小。
- 随着社交媒体网络遵循节点度的幂定律分布,许多节点将被修剪
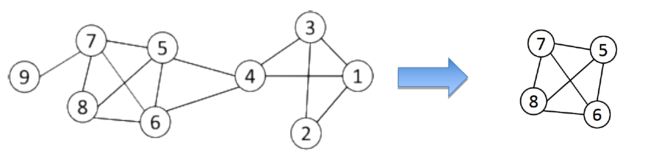
- 假设我们对一个节点为{1-9}的子网进行采样,并找到一个大小为3的集团{1,2,3}
- 为了找到>3的集团,请删除所有具有度数小于2(3-1)的节点
- 删除节点2和9
- 删除节点1和3
- 删除节点4
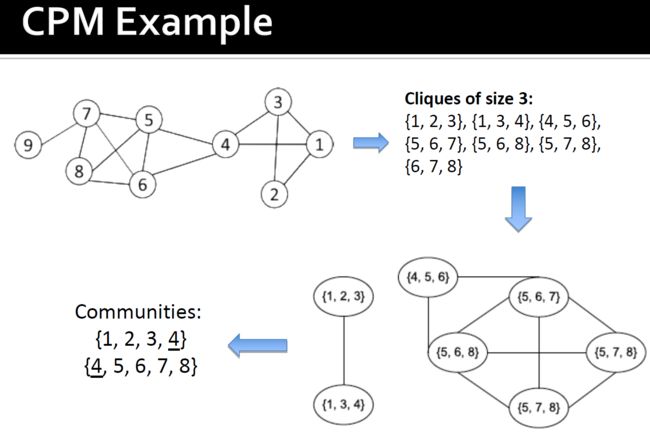
3.5.1.2. Clique渗透方法(CPM)
- Clique是非常严格的定义,不稳定
- 通常以Clique为核心或种子来寻找更大的社团
- CPM是查找重叠clique的一种方法
- 输入:参数k和网络
- 过程
- 找出给定网络中所有大小为k的clique
- 构造clique图。如果两个派系共享k-1个节点,则它们相邻
- 集团图中的每个连接组件都构成一个社团
区别社团和clique
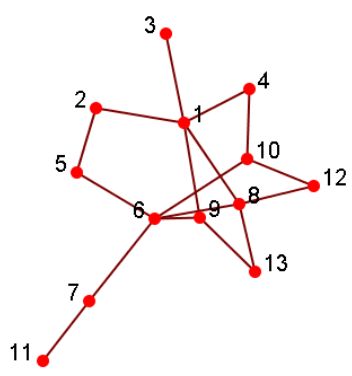
3.5.1.3. Geodesic
- 可达性通过Geodesic距离进行校准
- Geodesic:两个节点(12和6)之间的最短路径
- 两条路径:12-4-1-2-5-6、12-10-6
- 12-10-6是Geodesic
- Geodesic距离:在两个节点之间的Geodesic距离,例如,d(12,6)= 2,d(3,11)= 5
- 直径:网络中任意2个节点的最大测地距离,最长路径最短的跳跃
3.5.1.4. 可达性:k-clique、k-club
- 组中的任何节点都应在k跳中可达
- k-clique:最大子图,其中任何节点之间的最大Geodesic距离<=k,但是其直径可能会超过k
- k-club:直径小于等于k的子结构

- 上图中的2-clique:{12,4,10,1,6}
- 上图中的2-club:{1,2,5,6,8,9},{12,4,10,1}
- 直径可能会更大:子图d(1,6)= 3中
- 经常在传统SNA中使用
3.5.2. 以团体为中心的社团
- 以组为中心的标准要求整个组满足一定条件,例如,组密度>=给定阈值
- 考虑整个组中的连接,可以使某些节点的连接性低
- 对于有 V s V_s Vs个节点和 E s E_s Es条边的图 G s ( V s , E s ) G_s(V_s, E_s) Gs(Vs,Es)是一个密度为 γ \gamma γ的quasi-clique,如果满足
E s V s ( V s − 1 ) 2 ≥ γ \frac{E_s }{\frac{V_s(V_s - 1)}{2}} \geq \gamma 2Vs(Vs−1)Es≥γ
分母是最大度数
- 递归修剪:
- 对子图进行采样,找到最大的 γ \gamma γ密集拟似云(结果大小= k)
- 删除满足以下条件的结点
- 度小于 k γ k\gamma kγ
- 所有的邻居的度都小于 k γ k\gamma kγ
- 采样一个子图,并找到一个最大的 γ − d e n s e \gamma-dense γ−dense quasi-clique(比如 ∣ V s ∣ |V_s| ∣Vs∣的大小)
- 删除度数小于平均度数的节点
< ∣ V s ∣ γ ≤ 2 ∣ E s ∣ ∣ V s ∣ − 1 < |V_s|\gamma \leq\frac{2|E_s|}{|V_s|-1} <∣Vs∣γ≤∣Vs∣−12∣Es∣
3.5.3. 以网络为中心的社团
- 要形成一个组,我们需要全局考虑节点的连接。
- 目标:将网络划分为不相交的集合
- 基于节点相似性的组
- 基于潜在空间模型的组
- 基于块模型近似的组
- 基于切割最小化的组
- 基于模块化最大化的组
3.5.3.1. 节点相似度
- 节点相似性由它们的交互模式有多相似来定义,对节点应用k均值或基于相似度的聚类。
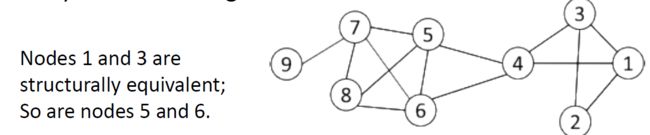
- 如果两个节点连接到同一组参与者,则在结构上是等效的。例如,节点8和9在结构上等效
- 组是在等效节点上定义的:过于严格、很少大规模放生、宽松的等价类很难计算
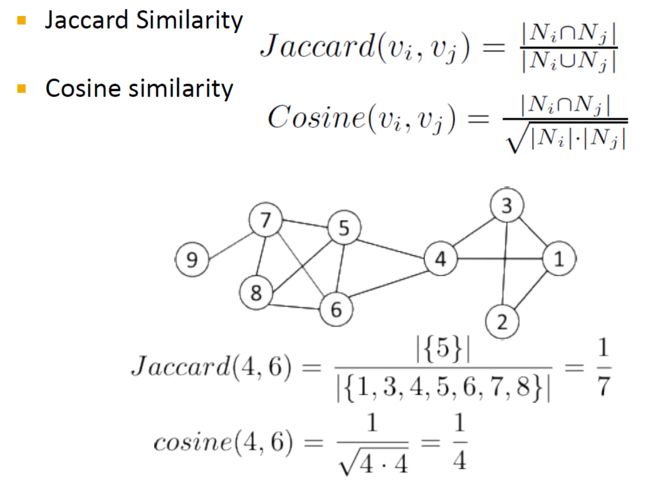
- 实际上,使用向量相似度:例如,余弦相似度,Jaccard相似度
3.5.3.2. 向量相似度
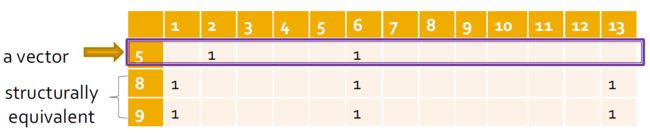
- Cosine Similarity
s i m i l a r i t y = cos ( θ ) = A ∩ B ∣ ∣ A ∣ ∣ ∗ ∣ ∣ B ∣ ∣ s i m ( 5 , 8 ) = 1 2 ∗ 3 = 1 6 similarity = \cos(\theta) = \frac{A \cap B}{||A||*||B||} \\ sim(5,8) = \frac{1}{\sqrt{2} * \sqrt{3}} = \frac{1}{\sqrt{6}} \\ similarity=cos(θ)=∣∣A∣∣∗∣∣B∣∣A∩Bsim(5,8)=2∗31=61
- Jaccard Similarity
J ( A , B ) = ∣ A ∩ B ∣ ∣ A ∪ B ∣ J ( 5 , 8 ) = ∣ { 6 } ∣ ∣ { 1 , 2 , 6 , 13 } ∣ = 1 4 J(A, B) = \frac{|A \cap B|}{|A \cup B|} \\ J(5, 8) = \frac{|\{6\}|}{|\{1, 2, 6, 13\}|} = \frac{1}{4} \\ J(A,B)=∣A∪B∣∣A∩B∣J(5,8)=∣{1,2,6,13}∣∣{6}∣=41
3.5.3.3. 基于节点相似度的聚类
- 对于大型网络的实际使用:
- 将连接视为特征
- 使用余弦或Jaccard相似度计算顶点相似度
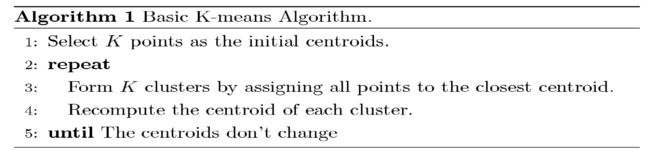
- 应用经典的k均值聚类算法
- K均值聚类算法:
- 每个聚类与一个质心(中心点)相关联
- 将每个节点分配给具有最接近质心的群集
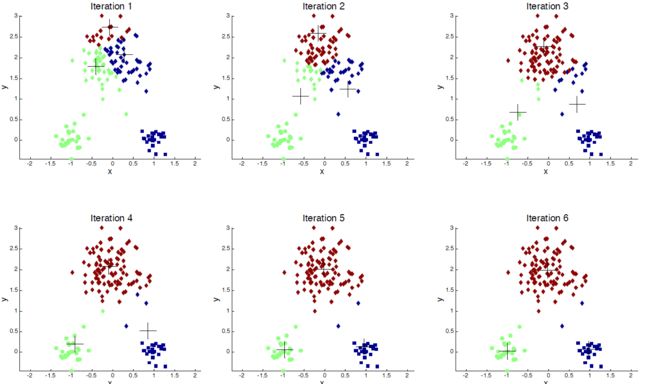
3.5.3.4. 潜在空间模型上的组
- 潜在空间模型:将网络中的节点转换为较低维度的空间,以使节点之间的距离或相似性保持在欧几里得空间中
- 将k均值应用于S以获取聚类
3.5.3.5. 多维缩放(MDS)
- 给定一个网络,构造一个接近矩阵来表示节点之间的距离(例如geodesic距离)
- 令D表示节点之间的平方距离
- S ∈ R n ∗ k S \in R^{n * k} S∈Rn∗k表示低维空间中的坐标
S S T = − 1 2 ∗ ( I − 1 n e ∗ e T ) D ( I − 1 n e ∗ e T ) = △ ( D ) SS^T = -\frac{1}{2} *(I - \frac{1}{n}e*e^T)D(I - \frac{1}{n}e*e^T) = \triangle(D) SST=−21∗(I−n1e∗eT)D(I−n1e∗eT)=△(D)
- 客观性:最小化差异 min ∣ ∣ △ ( D ) − S S T ∣ ∣ F \min||\triangle(D) - SS^T||_F min∣∣△(D)−SST∣∣F
- 我们计算 E = d i a g ( λ 1 , . . . , λ k ) \Epsilon = diag(\lambda_1, ... , \lambda_k) E=diag(λ1,...,λk)的前k个特征值,V前k个特征向量
- 解决方案: S = V ∗ E 1 2 S = V * \Epsilon^{\frac{1}{2}} S=V∗E21
- 例子:
3.5.3.6. 块模型近似
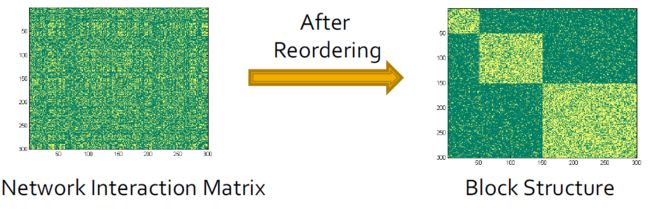
- 客观上,最小化两个矩阵之间的差异
min S , Σ ∣ ∣ A − S Σ S T ∣ ∣ F s . t . S ∈ 0 , 1 n ∗ k , Σ ∈ R k ∗ k i s d i a g o n a l \min\limits_{S, \Sigma}||A - S \Sigma S^T||_F \\ s.t.\ S \in{0, 1}^{n * k}, \Sigma \in R^{k * k} is\ diagonal S,Σmin∣∣A−SΣST∣∣Fs.t. S∈0,1n∗k,Σ∈Rk∗kis diagonal
- 挑战:S是离散的,很难去求解
- 放松:允许S连续满足 S T S = I k S^TS = I_k STS=Ik
- 解决方案:使用矩阵A的特征值
- 后处理:将k均值应用于S以找到分区
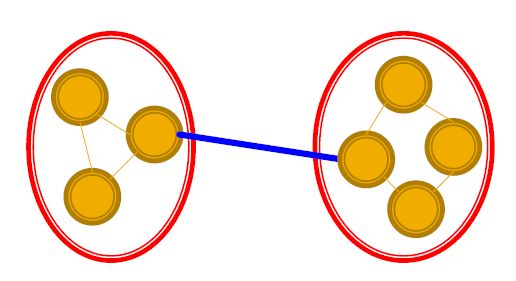
3.5.3.7. 最小化切割
- 大多数互动都在小组内部,而小组之间的互动很少
- 我们将社团检测简化为最小切割问题
- 剪切:将图的顶点划分为两个不相交的集合
- 目标:最小割问题,找到一个图形分区,以使两组之间的边数最小化
- 限制:经常会找到只有一个结点的社团
- 需要去考虑组的大小
c u t ( C 1 , C 2 , C 3 , . . . , C k ) = ∑ i = 1 k c u t ( C i , C i ‾ ) cut(C_1, C_2, C_3, ..., C_k) = \sum\limits_{i = 1}\limits^{k}cut(C_i, \overline{C_i}) cut(C1,C2,C3,...,Ck)=i=1∑kcut(Ci,Ci)
3.5.3.8. 经常使用的切割方式
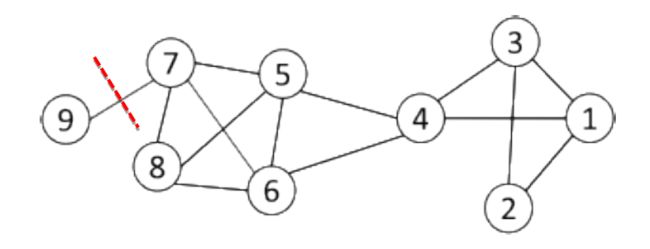
- 最小切割通常会返回不平衡的分区,其中一组是单例,例如 节点9
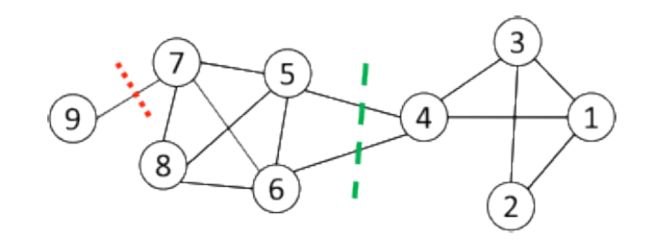
- 更改目标函数以考虑社区规模
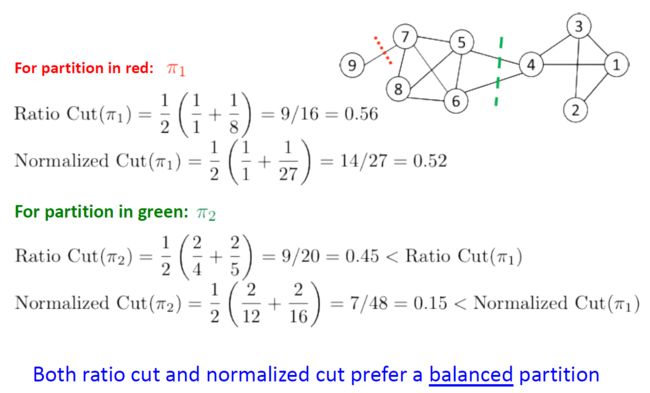
- Ratio-cut:在网络中的结点数量
- Normalized-cut:在组内的结点的相关性
R a t i o − c u t ( C 1 , C 2 , . . . , C k ) = ∑ i = 1 k c u t ( C i , C i ‾ ) ∣ V i ∣ N o r m a l i z e d − c u t ( C 1 , C 2 , . . . , C k ) = 1 k ∑ i = 1 k c u t ( C i , C i ‾ ) v o l ( V i ) Ratio-cut(C_1, C_2,... , C_k) = \sum\limits_{i=1}\limits^k\frac{cut(C_i, \overline{C_i})}{|V_i|} \\ Normalized-cut(C_1, C_2, ... , C_k) = \frac{1}{k}\sum\limits_{i = 1}\limits^{k}\frac{cut(C_i, \overline{C_i})}{vol(V_i)} Ratio−cut(C1,C2,...,Ck)=i=1∑k∣Vi∣cut(Ci,Ci)Normalized−cut(C1,C2,...,Ck)=k1i=1∑kvol(Vi)cut(Ci,Ci)
- C i C_i Ci是一个社团
- ∣ C i ∣ |C_i| ∣Ci∣是 C i C_i Ci中的结点数
- v o l ( C i ) vol(C_i) vol(Ci)是 C i C_i Ci中的结点的度总数,包含切断的边
3.5.3.9. 图拉普拉斯算子
- 可以被花间为如下的最短路径问题
- L是(规范化)图拉普拉斯算子
min S ∈ R n ∗ k T r ( S T L S ) s . t . S T S = I L = D − A D = [ d 1 0 . . . 0 0 d 2 . . . 0 . . . . . . . . . . . . 0 0 . . . d n ] n o r m a l i z e d − L = I − D − 1 2 A D − 1 2 \min\limits_{S \in R^{n * k}} Tr(S^TLS)\ s.t. S^TS = I \\ L = D - A \\ D = \begin{bmatrix} d_1 & 0 & ... & 0 \\ 0 & d_2 & ... & 0 \\ . & . & . & . \\ . & . & . & . \\ . & . & . & . \\ 0 & 0 & ... & d_n \\ \end{bmatrix} \\ \ \\ normalized-L = I - D^{-\frac{1}{2}}AD^{-\frac{1}{2}} \\ S∈Rn∗kminTr(STLS) s.t.STS=IL=D−AD=⎣⎢⎢⎢⎢⎢⎢⎡d10...00d2...0............00...dn⎦⎥⎥⎥⎥⎥⎥⎤ normalized−L=I−D−21AD−21
- 解决方案:S是具有最小特征值的L的特征向量(第一个特征除外)
- 后处理:将k均值应用于S,亦称光谱聚类
3.5.3.10. 模块化最大化
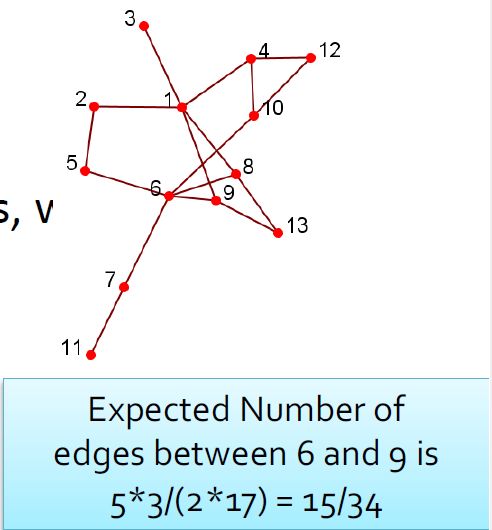
- 模块化通过考虑度数分布来度量社区划分的强度。给定一个具有m个边的网络,度为 d i d_i di和 d j d_j dj的两个节点之间的期望边数为
d i ∗ d j 2 ∗ m \frac{d_i * d_j}{2 * m} 2∗mdi∗dj
- 社团的强度:
∑ i ∈ C , j ∈ C ( A i j − d i d j 2 m ) \sum\limits_{i \in C, j \in C} (A_{ij} - \frac{d_id_j}{2m}) i∈C,j∈C∑(Aij−2mdidj)
- 模块化:较大的值表示社区结构良好
max 1 2 m ∑ C ∑ i ∈ C , j ∈ C A i j − d i d j 2 m \max \frac{1}{2m}\sum\limits_C\sum\limits_{i\in C,j\in C} A_{ij} - \frac{d_id_j}{2m} max2m1C∑i∈C,j∈C∑Aij−2mdidj

3.5.3.11. 模块矩阵
- 模块化最大化也可以用矩阵形式表示
Q = 1 2 m T r ( S T B S ) Q=\frac{1}{2m}Tr(S^TBS) Q=2m1Tr(STBS)
- B是模块化矩阵
B i j = A i j − d i d j 2 m B_{ij} = A_{ij} - \frac{d_id_j}{2m} Bij=Aij−2mdidj
- 解决方案:模块化矩阵的顶部特征向量
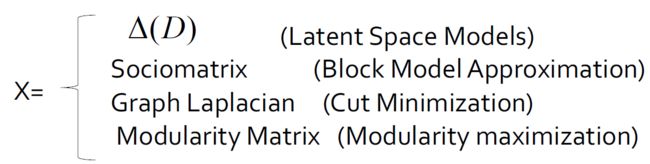
3.5.3.12. 矩阵分解形式
- 对于潜在空间模型,块模型,频谱聚类和模块化最大化
- 可以表述为
max ( min ) S T r ( S T X S ) s . t . S T S = I \max(\min)_S\ Tr(S^TXS) \\ s.t. S^TS = I max(min)S Tr(STXS)s.t.STS=I
3.5.3.13. 回顾以网络为中心的社团
- 以网络为中心的社团检测
- 基于节点相似性的组
- 基于潜在空间模型的组
- 基于切割最小化的组
- 基于块模型近似的组
- 基于模块化最大化的组
- 目标:将网络节点划分为几个不相交的集合
- 限制:要求用户事先指定社团数
3.5.4. 以等级为中心的社团
- 目标:基于网络拓扑构建社团的层次结构
- 便于以不同的分辨率进行分析
- 代表性方法:
- 划分层次聚类
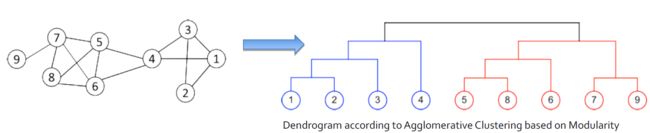
- 聚集层次聚类
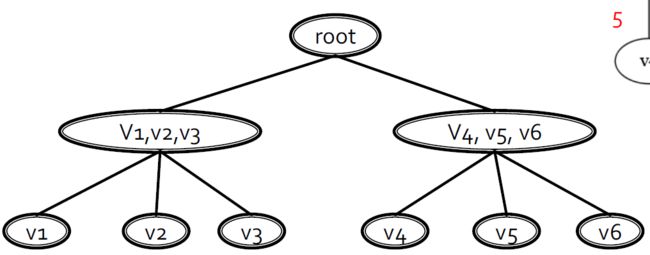
3.5.4.1. 划分层次聚类
- 划分层次聚类
- 将节点分成几组
- 每组进一步分成较小的组
- 以网络为中心的方法可以应用于分区
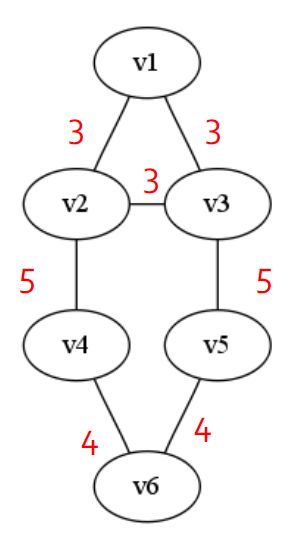
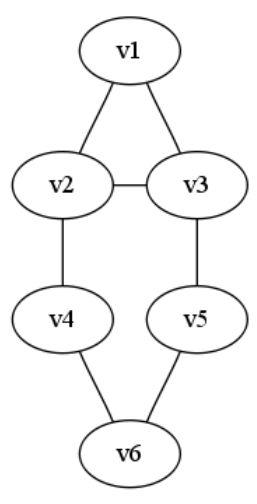
- 一个特定的例子:递归删除"最弱"的连接
- 找到强度最小的边
- 移除边并更新每个边的相应强度
- 递归上面的两个步骤,直到网络已经被分解成目标个数的联通图数
- 每一个连通图都构成一个社区
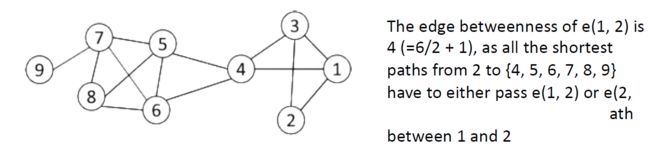
3.5.4.2. edge betweenness
- 边的强度可以通过边之间的距离来衡量
- edge betweenness:通过该边的最短路径的数量
- 具有较高中间性的betweenness往往是两个社区之间的桥梁。
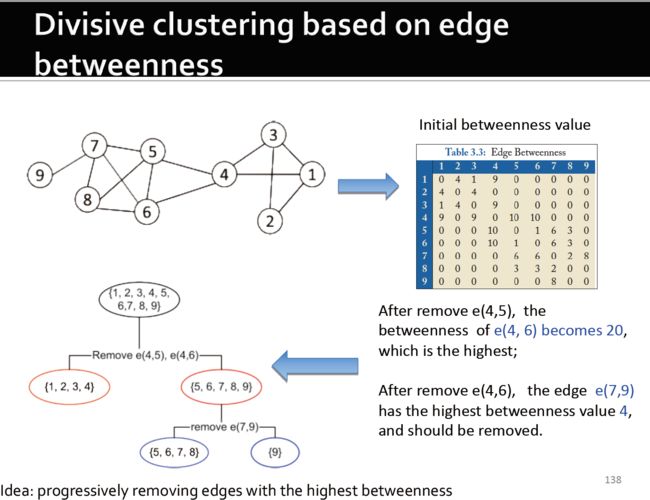
3.5.4.3. 根据edge betweenness来进行划分簇
- 逐步删除有最高的edge betweenness的边
- 删除e(2, 4), e(3, 5)
- 删除e(4, 6), e(5, 6)
- 删除e(1, 2), e(2, 3), e(3, 1)
 |
 |
|---|
3.5.4.4. 聚集层次聚类
- 将每个节点初始化为社团
- 选择两个满足特定条件的社团,然后将它们合并为更大的社团
- 最大模块化增加
- 最大节点相似度
 |
 |
|---|
3.5.4.5. 回顾层次聚类
- 大多数分层聚类算法输出二叉树
- 每个节点都有两个子节点
- 可能高度失衡
- 聚集集群对节点的处理顺序和采用的合并标准非常敏感。
- 分裂聚类更稳定,但通常计算量更大
3.6. 社团探测总结
- 最佳方法?
- 根据应用程序,网络,计算资源等的不同而不同。
- 可扩展性可能是社交媒体网络的关注点
- 其他研究领域
- 定向网络中的社团
- 重叠的社团
- 社团发展
- 组分析和解释
4. 图数据挖掘
 |
 |
|---|
4.1. 数据挖掘
数据挖掘也称为数据库知识发现(KDD,Knowledge
Discovery in Databases),是一种以无监督的方式从大型数据库中提取有用的隐藏信息的过程。
4.2. 类别任务
- 图模式挖掘
- 挖掘频繁的子图模式
- 图形索引
- 图相似搜索
- 图形分类
- 基于图模式的方法
- 机器学习方法
- 图聚类:基于链路密度的方法
4.3. 图模式挖掘
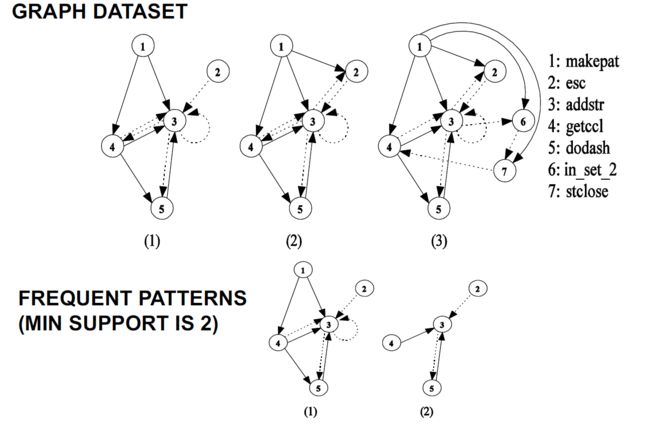
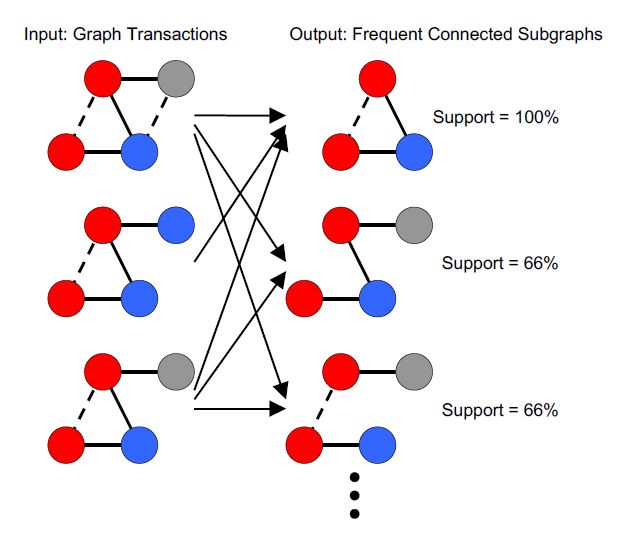
- 频繁子图:如果(子)图在给定数据集中的支持(发生频率)不小于最小支持阈值,则该图频繁
- 对图g的支持定义为G中以g为子图的图的百分比
- 图形模式挖掘的应用
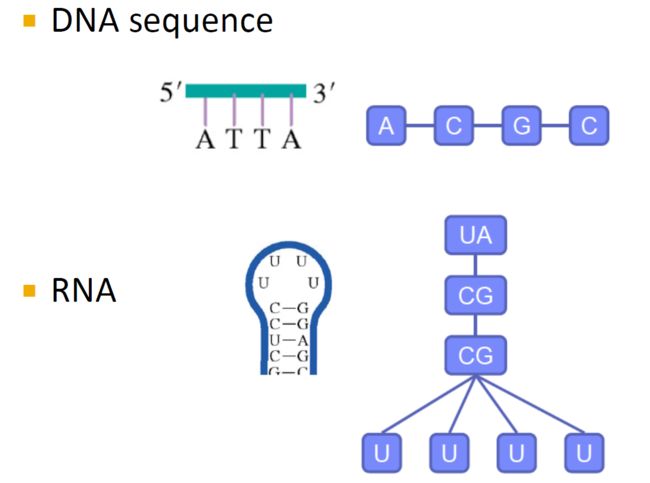
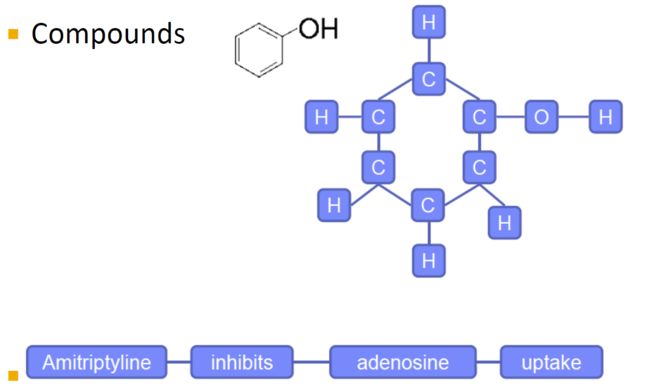
- 挖掘生化结构
- 程序控制流分析
- 挖掘XML结构或Web社团
- 用于图分类,聚类,压缩,比较和相关性分析的构建块
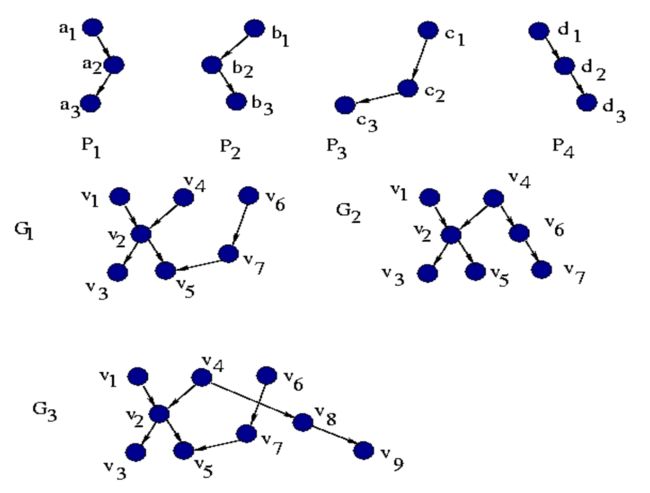
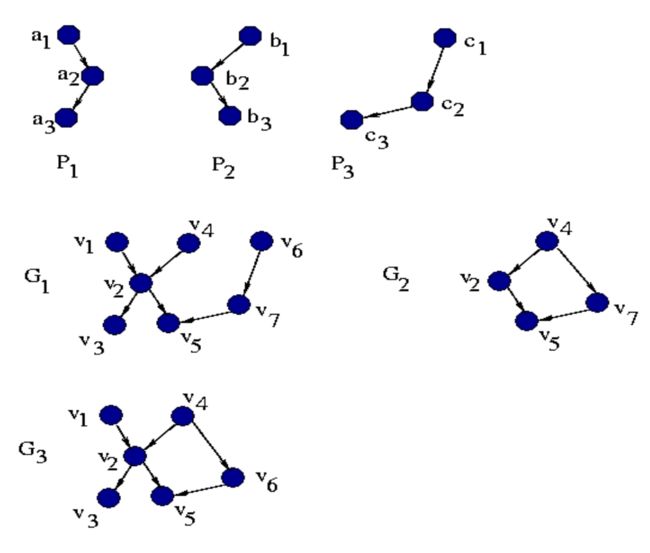
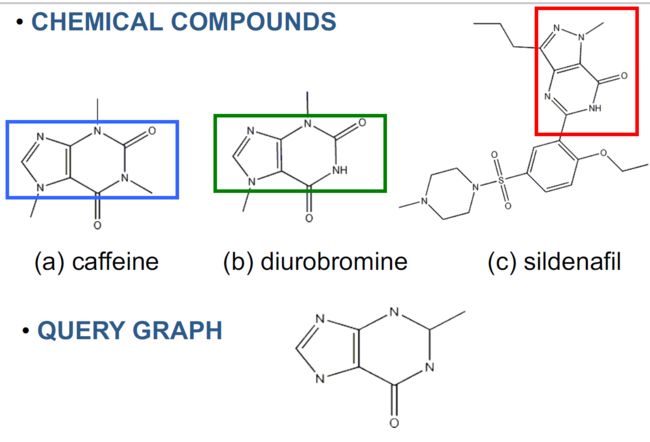
4.4. 示例:频繁子图
 |
 |
|---|
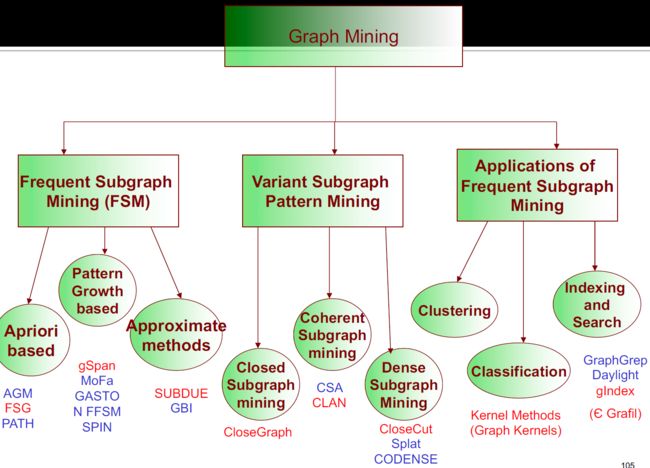
4.5. 图挖掘算法
- 不完全的光束搜索:贪婪(制服)
- 归纳逻辑编程(WARMR)
- 基于图论的方法
- 基于先验的方法
- 模式增长法
4.6. 图挖掘算法的性质
- 搜索顺序:宽度与深度
- 生成候选子图:先验与模式增长
- 消除重复的子图:被动与主动
- 支持计算:是否嵌入商店
- 发现花样顺序:path
->tree->graph
4.7. 基于先验的方法
4.7.1. 例子
4.7.2. 基于先验,广度优先搜索
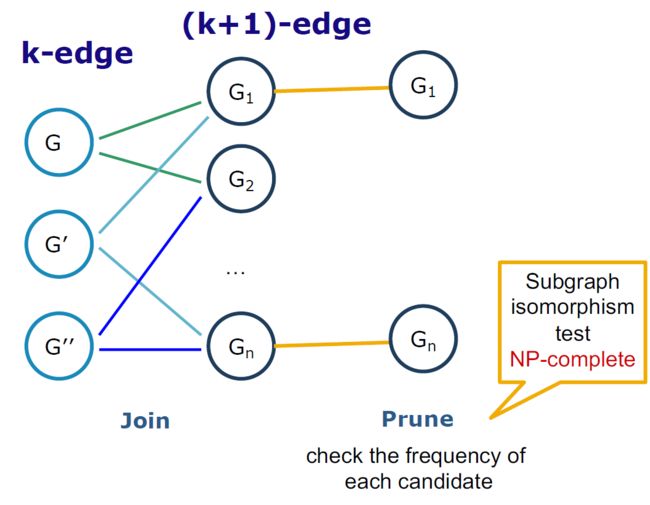
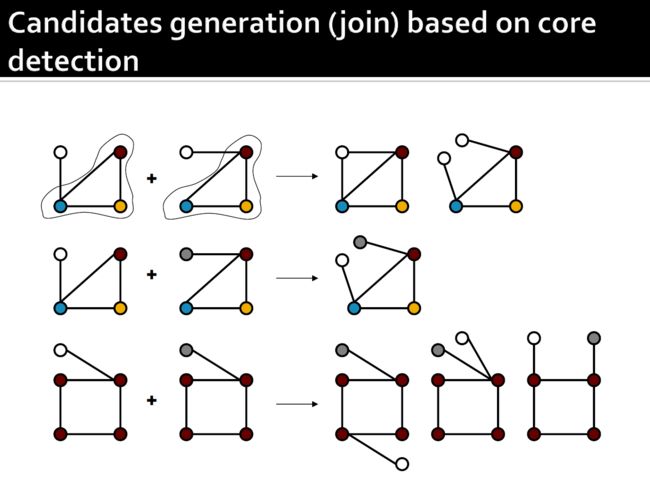
- 方法:广度搜索,连接两个图

- 年度股东大会(Inokuchi等):生成一个带有另外一个节点的新图形

- FSG(Kuramochi和Karypis):生成具有更多边的新图
4.8. 模式增长算法
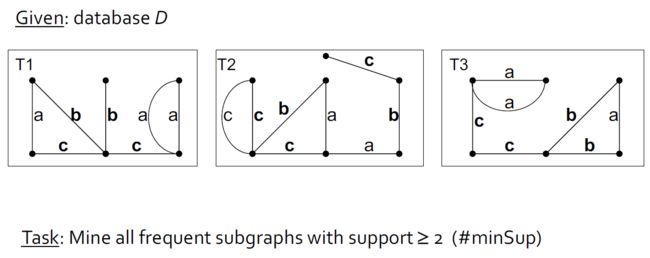
4.9. Transaction setting:GM的不同方法
4.9.1. 交易设定
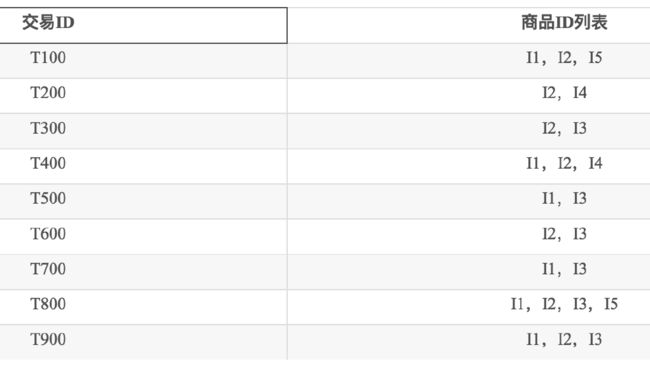
- 输入(D, minSup)
- 带有标签的图形交易记录集 D = T 1 , T 2 , . . . , T N D = {T_1,T_2,...,T_N} D=T1,T2,...,TN,是一个无向简单图,定点和边关联
- 最低支持minSup
- 输出(所有的频繁子图)
- 如果子图至少是minSup*|D|的子图,则该子图是频繁的。或#minSup)D中的不同交易。
- 每个子图都已连接。
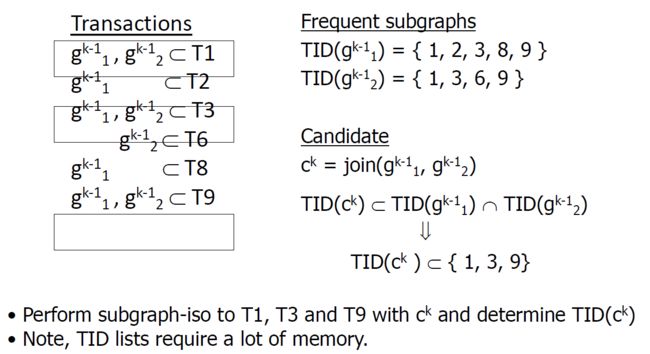
4.9.2. 先验式算法:FSG算法
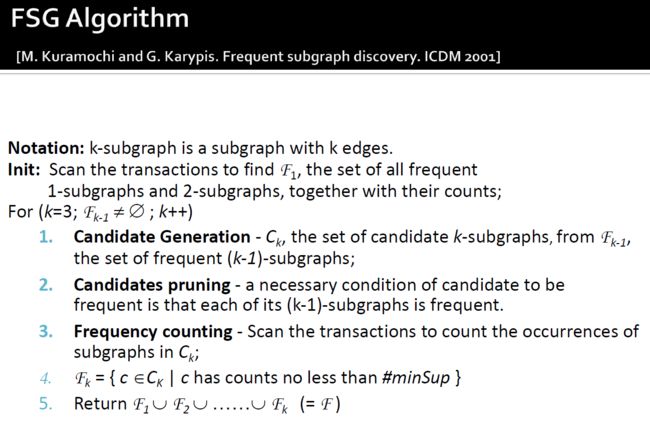
- Candidate generation:要确定两个候选候选对象,我们需要检查图同构。
- Candidate pruning:要检查向下闭合特性,我们需要图同构。
- Frequency counting:子图同构,用于检查频繁子图的包含性。
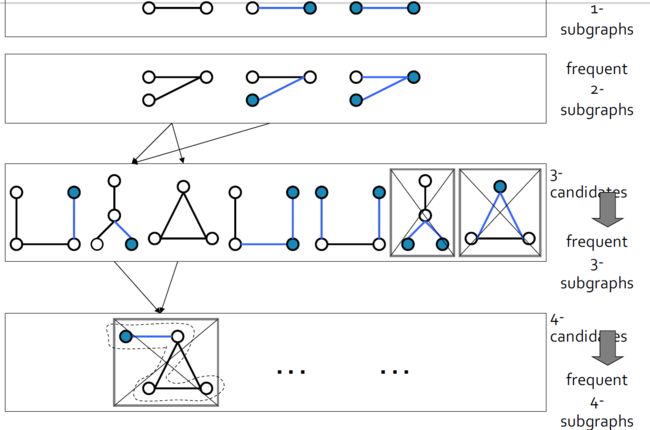
4.9.2.1. Candidate generation

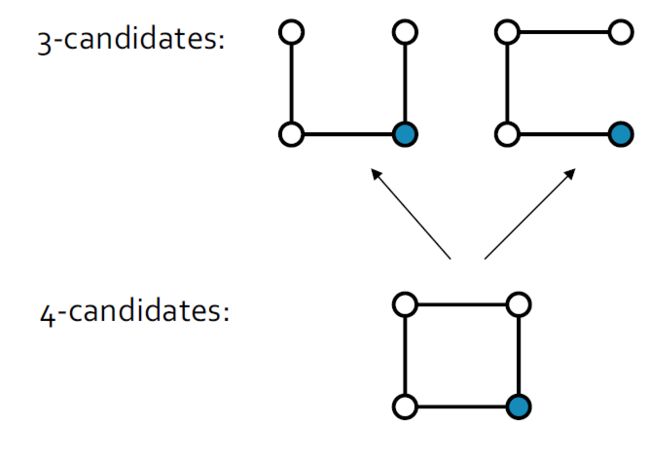
4.9.2.2. Candidate pruning:向下封闭属性
- 每个(k-1)个子图必须频繁出现。
- 对于给定k个候选的所有(k-1)个子图,检查向下闭合性是否成立
4.9.2.3. Frequency counting
4.9.2.4. 计算挑战
- 图上面的简单的计算会变得复杂并且高代价
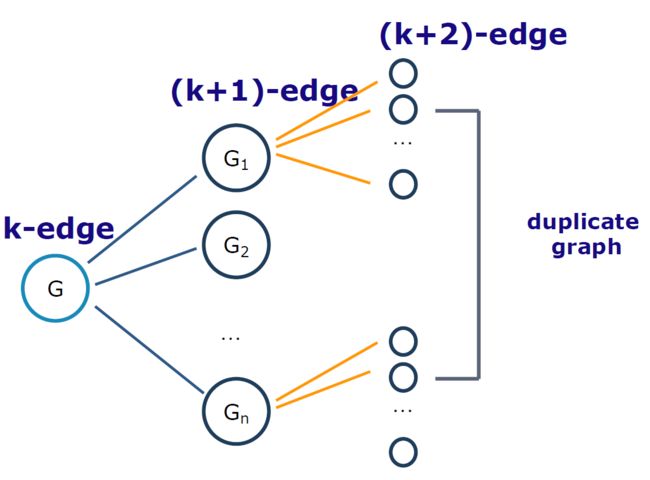
- Candidate generation
- 为了确定我们是否可以加入两个候选者,我们需要执行子图同构来确定它们是否具有共同的子图。
- 没有明显的方法可以减少我们生成同一子图的次数。
- 需要执行图同构以进行冗余检查。
- 两个频繁子图的联接可以导致多个候选子图。
- Candidate pruning:要检查向下封闭性,我们需要子图同构。
- Frequency counting:子图同构,用于检查频繁子图的包含性
- FSG计算效率的关键:
- 使用高效的算法来确定图形的规范标签,并使用这些"字符串"执行身份检查(字符串的简单比较!)。
- 使用复杂的候选生成算法,可减少每个候选生成的次数。
- 使用基于增强TID列表的方法来加快频率计数。
4.9.2.5. FSG:基于邻接矩阵的图规范化表示

4.9.2.6. 规范化标记
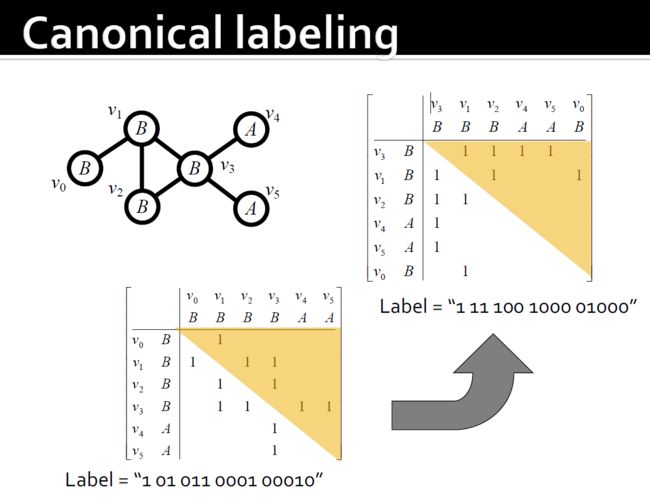
4.9.2.7. FSG:找到规范化标记
- 这个问题和图同构一样复杂,但是FSG建议使用一些启发式方法来加速它
- 如:
- 顶点不变式(例如度)
- 邻居列表
- 迭代分区
4.9.2.8. 另一种FSG启发式算法:Frequency counting
4.9.2.9. 拓扑是不充分的
- 由物理域产生的图具有很强的几何性质,数据挖掘算法必须考虑这种几何形状。
- 几何图,顶点具有与之关联的物理2D和3D坐标。
4.9.3. gFSG:FSG的Geometric扩展
- 与FSG相同的输入和相同的输出:查找频繁的几何连接子图
- (子)图同构的几何版本
- 顶点的映射可以是平移,旋转和/或缩放不变的。
- 只要坐标在r的公差半径内,坐标的匹配就可能不精确。R容忍的几何同构。
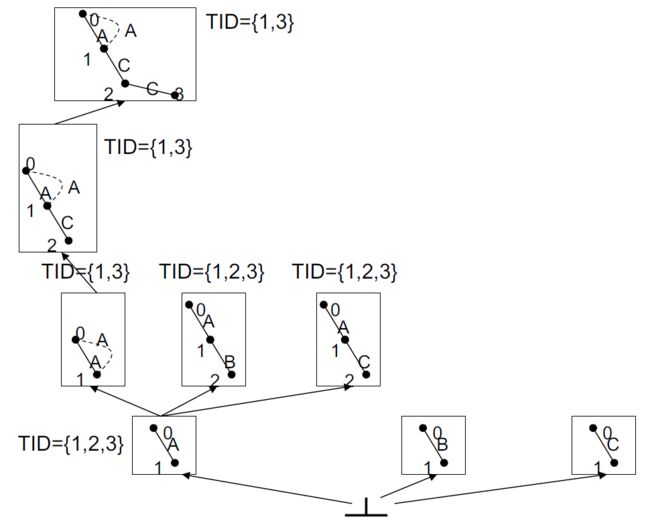
4.9.4. DFS方法:gSpan
4.9.4.1. 定义查询树空间(TSS,Tree Search Space)
- 数据集查询空间(前缀树)
4.9.4.1.1. TSS的驱动
- 项集的规范表示是通过对项的完整顺序获得的。
- 每个可能的项目集在TSS中仅出现一次:没有重复或遗漏。
- 树搜索空间的属性
- 对于每个k标签,其父对象是给定k标签的k-1前缀
- 兄弟姐妹之间的关系按字典顺序升序。
4.9.4.1.2. DFS 编码表示
- 将每个图形(二维)映射到顺序的DFS代码(一维)。
- 按词典顺序对代码进行排序。
- 根据字典顺序构造TSS。
4.9.4.1.3. DFS编码过程
- 给定图G,针对图G上的每个深度优先搜索,构造相应的DFS代码。
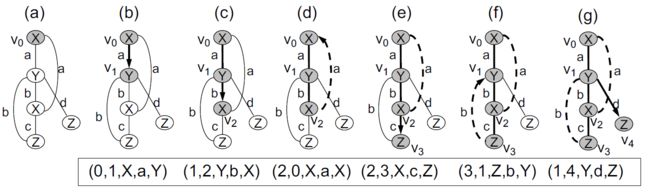
4.9.4.1.4. 简单图与DFS编码示例
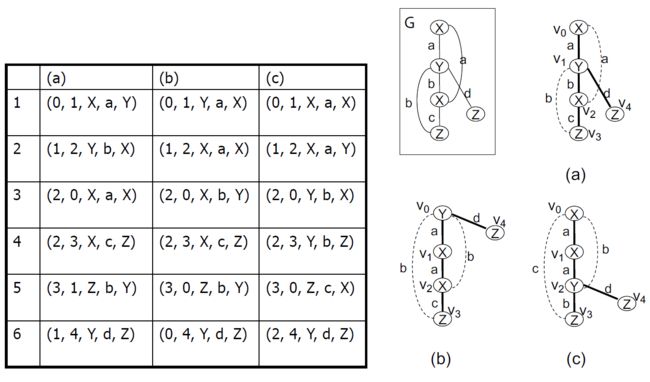
4.9.4.1.5. 最小化DFS编码
- 最小DFS代码min(G)(按DFS词典顺序)是图G的规范表示。
- 当且仅当以下条件时,图A和B是同构的:min(A)= min(B)
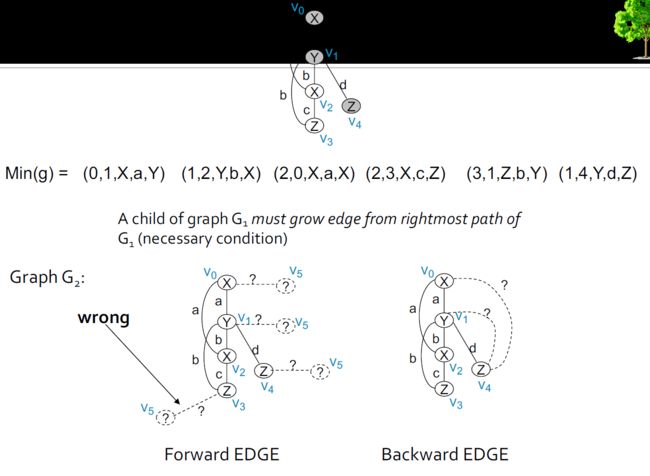
4.9.4.1.6. DFS编码数-父子关系
- 如果 min ( G 1 ) = a 0 , a 1 , . . . , a n \min(G_1)= {a_0,a_1,...,a_n} min(G1)=a0,a1,...,an和 min ( G 2 ) = a 0 , a 1 , . . . , a n , b \min(G_2)= {a_0,a_1,...,a_n,b} min(G2)=a0,a1,...,an,b
- G1是G2的父级
- G2是G1的子代
- 有效的DFS代码要求b从最右边路径上的顶点开始增长(DFS搜索中的继承属性)
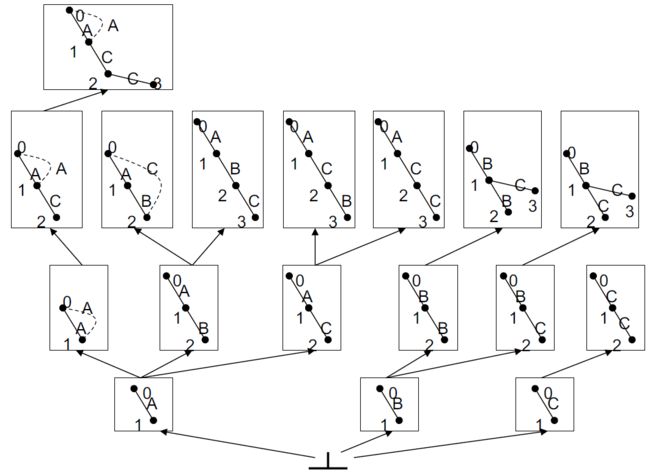
4.9.4.1.7. 搜索空间:DFS编码数
- 将DFS代码节点组织为父子节点。
- 兄弟节点按照DFS字典顺序升序组织。
- 按序遍历遵循DFS字典顺序!
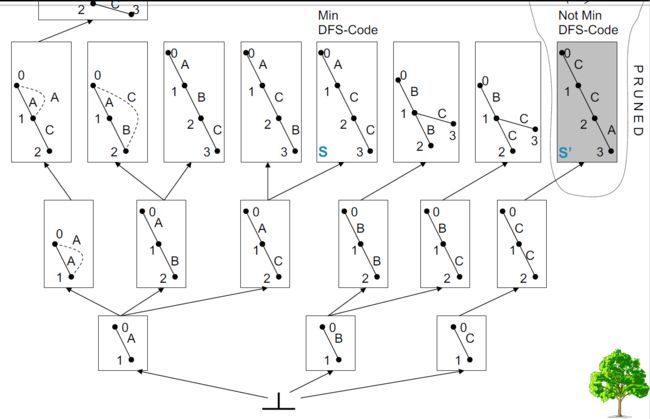
4.9.4.1.8. 树剪枝
- 稀疏节点的所有后代也是稀疏的。
- 非最小DFS代码的所有后代也不是最小DFS代码。
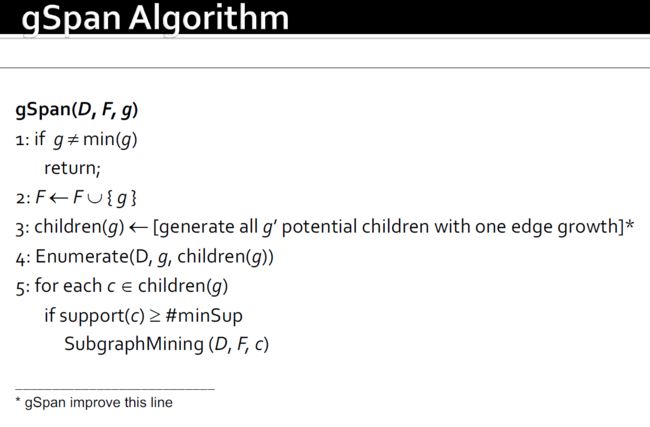
4.9.4.2. gSpan使用TSS查找频繁图
4.9.4.2.1. gSpan内容
4.9.4.2.2. 示例
 |
 |
|---|---|
 |
4.9.4.3. gSpan算法表现
- 在合成数据集上,它比FSG快6-10倍。
- 在化合物数据集上,它快15到100倍!
- 但这与FSG的旧版本相比!
4.9.5. 贪婪算法:Subdue
- 一种贪婪算法,用于查找一些最普遍的子图。
- 此方法不完整,即虽然可以快速执行,但可能无法获得所有频繁的子图。
- 它发现可压缩原始数据并表示数据中结构概念的子结构。
- 基于波束搜索与BFS一样,它逐级进行。但是,与BFS不同,波束搜索仅通过每个级别的最佳W节点向下移动。其他节点将被忽略。
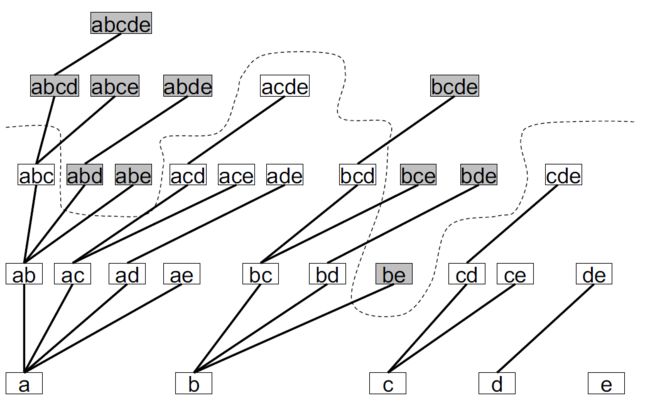
4.9.5.1. 图模式探索问题
- 如果图是频繁的,则其所有子图都是频繁的:先验属性
- n边频繁图可能有2n个子图
- 在AIDS抗病毒筛选数据集中被确认具有活性的422种化合物中,如果最低支持为5%,则有1,000,000个频繁的图形模式
4.9.5.2. 第一步:为每个唯一的顶点标签创建子结构

4.9.5.3. 第二步:通过边或边和相邻顶点扩展最佳子结构
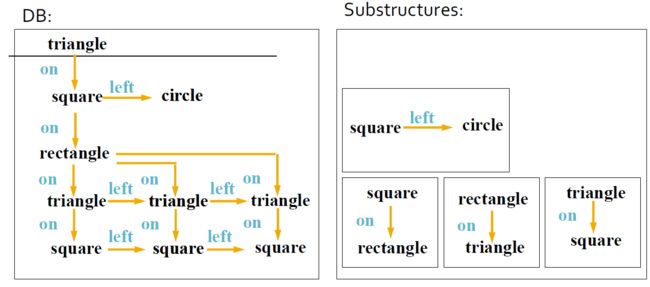
4.9.5.4. 第三步:仅将最佳子结构保留在队列中(由光束宽度指定)
4.9.5.5. 第四步:在队列为空或发现的子结构数大于或等于指定的限制时终止。
4.9.5.6. 第五步:压缩图并重复以生成层次描述。
4.10. Single graph setting问题
- 现有的大多数算法都使用Transaction setting方法。
- 也就是说,如果某个模式甚至多次出现在Transaction中,则将其计为1(FSG,gSPAN)。
- 如果整个数据库是单个图形怎么办? 这称为单图设置。
- 我们需要一个不同的支持定义!
4.10.1. 单个图设定
- 输入(D, minSup)
- 一个简单图D(比如网络或者存储在XML中的BDLP)
- 最低支持minSup
- 输出(所有的频繁子图)
- 如果子图中在D中出现的次数大于允许的支持度量(满足向下封闭性的度量),则该子图是频繁出现的。
4.10.2. 单个图设计:动机
- 输入通常是一个大图。
- 示例:
- 网页或网页的一部分。
- 社交网络(例如,通过BGU通过电子邮件进行通信的用户网络)。
- 大型XML数据库,例如DBLP或Movies数据库。
- 挖掘大型图形数据库非常有用。
4.10.3. 支持的问题
- 如果对于任何模式P和任何子模式QÌP,P的支持不大于Q的支持,则允许采取支持措施。
- 问题:图案出现的数量不好!
4.10.4. 支持的问题
- 数据库图D中的模式P的实例图是这样的图:其节点是D中的模式实例,并且当相应的实例共享边时,它们通过边连接。
- 实例图上的操作
- clique收缩:用单个节点c替换组C。只有与C的每个节点相邻的节点才可以与c相邻。
- 节点扩展:用新的子图替换节点v,该子图的节点可能与相邻于v的节点相邻或不相邻。
- 节点添加:向图中添加一个新节点,并在新节点和旧节点之间添加任意边。
- 边去除:去除边
4.10.5. 主要的结果
- 定理。当且仅当在团簇收缩,节点扩展,节点添加和边缘去除下每个模式P的实例图上不减少时,支持度量S才是允许的支持度量。
- 支持度量示例
M I S = 实 例 图 的 最 大 独 立 设 置 大 小 数 据 库 图 中 的 边 数 MIS = \frac{实例图的最大独立设置大小}{数据库图中的边数} MIS=数据库图中的边数实例图的最大独立设置大小
4.10.6. 路径挖掘算法(Vanetik,Gudes,Shimony)
- 目标:查找数据库图的所有频繁连接的子图。
- 基本方法:Apriori或BFS。
- 基本构建块是路径而不是边。
- 这是可行的,因为任何图都可以分解为边不相交的路径。
- 结果:算法收敛更快。
4.10.6.1. 基于路径的挖掘算法
- 该算法使用路径作为模式构建的基本构建块。
- 它从单路径图开始,然后将它们组合为2、3等路径图。
- 组合技术不使用图形运算,易于实现。
- 图的路径数以线性时间计算:奇数度顶点的数量除以2。
- 给定最小路径覆盖P,给定一条路径的删除将创建一个具有最小路径覆盖大小|P| -1的图形。
- P中至少存在两条路径,将其删除会使图形保持连接状态。
4.10.6.2. 超过一条边覆盖的图
- 根据节点标签和节点度定义每个路径的描述符。
- 使用描述符中的字典顺序在路径之间进行比较。
- 一张图可以具有多个最小路径覆盖。
- 我们只使用与字典顺序相关的最小的路径覆盖。
- 从词典上最小的路径封面中删除路径,使封面在词典上最小。
4.10.6.3. 路径描述符示例
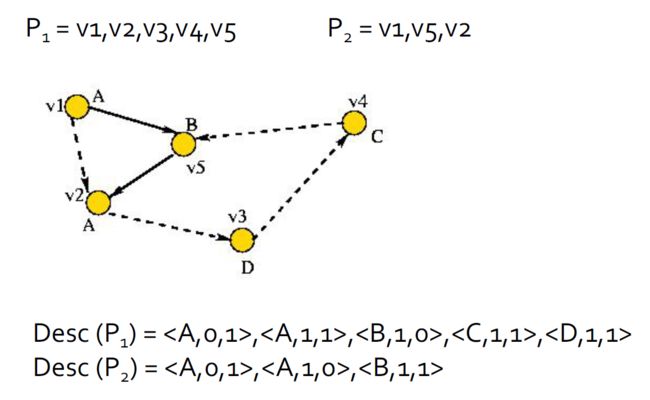
4.10.6.4. 路径挖掘算法
- 阶段1:找出所有常见的1-路径图。
- 阶段2:通过"加入"频繁的1-路径图找到所有频繁的2-路径图。
- 阶段3:通过"联接"成对的(k-1)路径图,找到所有频繁的k路径图, k ≥ 3 k \geq 3 k≥3。
- 主要挑战:"加入"必须确保算法的健全性和完整性。
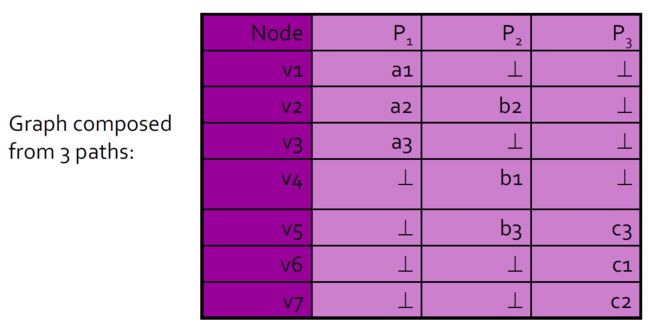
4.10.6.5. 图形作为路径的集合:表表示
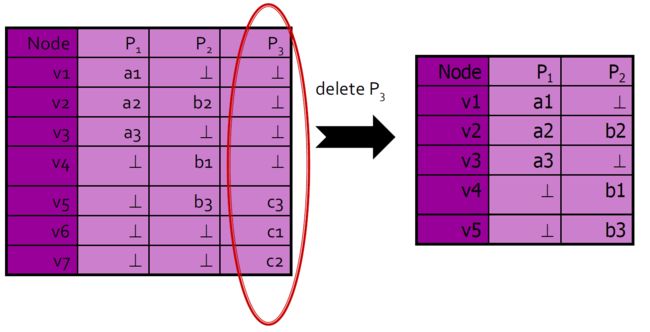
4.10.6.6. 从表中删除路径
4.10.6.7. 用通用路径联接图:求和运算
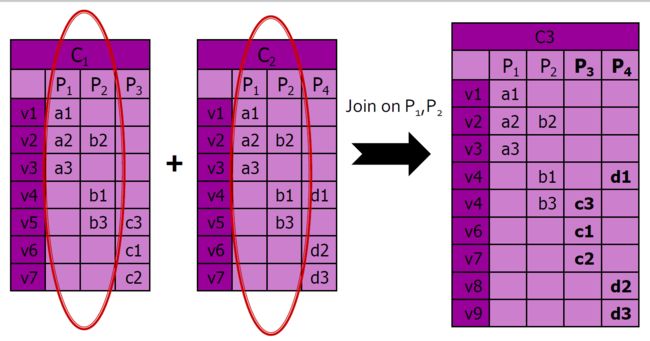
求和运算:在图形上的外观
4.10.6.8. 总和是不够的:拼接操作
- 我们需要在路径 P 1 , . . . , P n P_1,...,P_n P1,...,Pn上构造一个频繁的n路径图G。
- 我们有两个频繁的(n-1)个路径图,路径 P 1 , . . . , P n − 1 P_1,...,P_{n-1} P1,...,Pn−1上的G1和路径 P 2 , . . . , P n P_2,...,P_n P2,...,Pn上的G2。
- G1和G2的总和将为我们在路径 P 1 , . . . , P n P_1,...,P_n P1,...,Pn上提供n路径图G’。
- 如果P1和Pn没有仅属于它们的公共节点,则G’= G。
- 如果G频繁出现,则包含P1和Pn的精确2-路径图H完全与G中出现的一样。
- 让我们根据H加入G’中P1和Pn的节点。这是拼接操作!
拼接操作例子

拼接操作:在图形上的外观
4.10.6.9. 标记图:我们注意标记

4.10.6.10. 路径挖掘算法例子
- 查找所有常见的边。
- 通过一次添加一条边找到频繁的路径(并非所有节点都适合!)
- 通过穷举查找所有频繁的2路径图。
- 设置k = 2。
- 虽然存在频繁的k路径图
- 在适用的情况下,对成对的频繁k路径图执行求和运算。
- 对生成的(k + 1)个路径候选者执行拼接操作,以获得其他(k + 1)个路径候选者。
- 计算对(k + 1)个路径候选者的支持。
- 消除不经常出现的候选人,并设置k:= k + 1。
- 转到5。
4.10.7. 复杂性
- 指数-频繁模式的数量可以指数,数据库大小(如任何Apriori算法)
- 艰巨的任务:(NP hard)
- 支持的计算包括:在数据库中查找频繁模式的所有实例。(子图同构)
- 计算实例图的MIS(最大独立集合大小)。
- 相对简单的任务:
- 候选集生成:上一次迭代中频繁集大小的多项式,
- 消除同构候选模式:图同构计算在最坏的情况下取决于模式的大小,而不是数据库的指数。
4.10.8. 简单图设置的补充方法
- BFS Approach:hSiGram
- DFS Approach:vSiGram
- 两者都使用MIS测度的近似值
4.11. 封闭频繁图
- 频繁图G关闭:如果不存在与G具有相同支持的G的上标
- 如果某些G的子图具有相同的支持
- 不必输出这些子图
- 非封闭图
- 无损压缩:仍确保挖掘结果完整
4.12. 图搜索
- 查询图数据库:给定图数据库和查询图,找到包含该查询图的所有图
4.13. 可扩展性
- 天真的解决方案
- 顺序扫描(磁盘I / O)
- 子图同构测试(NP完全)
- 问题:可伸缩性是一个大问题
- 需要索引机制
4.14. 索引策略
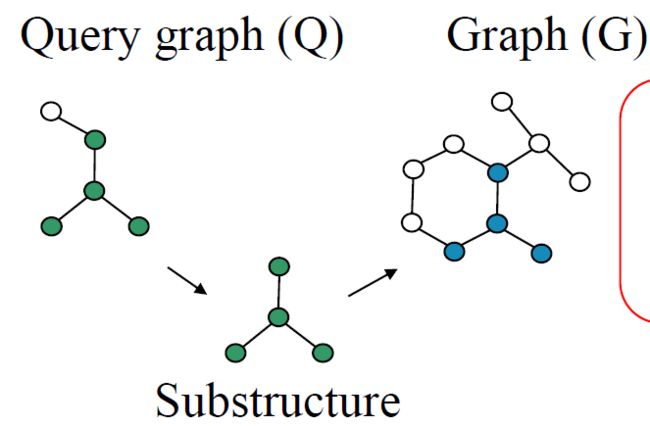
- 如果图G包含查询图Q,则G应该包含Q的任何子结构
- 备注:将查询图的子结构索引到不包含这些子结构的修剪图
4.14.1. 索引框架
- 处理图查询的两个步骤
- 步骤1.索引构建,枚举图数据库中的结构,在结构和图之间建立反向索引
- 步骤2.查询处理
- 列举查询图中的结构
- 计算包含这些结构的候选图
- 通过执行子图同构测试来修剪错误肯定答案
4.14.2. 为什么结果频繁
- 我们无法索引(甚至搜索)所有子结构
- 大型结构很可能会被其子结构索引
- 增加规模的支持门槛
4.14.3. 结构相似查询
4.14.4. 子结构相似度度量
- 基于特征的相似性度量
- 每个图都表示为一个特征向量
X = x 1 , x 2 , . . . , x n X = {x_1,x_2,...,x_n} X=x1,x2,...,xn
- 相似性是由它们对应的距离定义的向量
- 优点
- 易于索引
- 快速
- 粗略的措施
4.14.5. 一些更直接的方法
- 方法1:直接计算数据库中的图和查询图之间的相似度
- 顺序扫描
- 子图相似度计算
- 方法2:根据原始查询图形成一组子图查询,并使用精确的子图搜索。代价高昂:如果我们允许在20条边的查询图中遗漏3条边,则可能会生成1,140个子图
4.14.6. 索引:精确和模糊查询
- 精确搜寻
- 使用频繁模式作为索引功能
- 根据其选择性在数据库空间中选择特征
- 建立索引
- 近似搜索
- 难以建立涵盖相似子图的索引
- 数据库中子图的爆炸数量
- 想法:
- 保持索引结构
- 在查询空间中选择要素
4.15. 图分类问题
4.15.1. 基于子结构的图分类问题
- 基本思路
- 提取图子结构, F = g 1 , . . . , g n F = {g_1, ..., g_n} F=g1,...,gn
- 用特征向量 X = x 1 , . . . , x n X = {x_1, ..., x_n} X=x1,...,xn表示图, x 1 x_1 x1是 g i g_i gi在图中出现的次数。
- 建立分类模型
- 不同的功能和代表性的工作
- 指纹
- Maccs键
- 树和循环模式[Horvath等]
- 最小对比度子图[Ting和Bailey]
- 频繁的子图[Deshpande等; 刘等]
- Graph片段[Wale和Karypis]
4.15.2. 直接挖掘判别模式
- 避免挖掘整个模式
- Harmony [Wang和Karypis]
- DDPMine [Cheng等]
- LEAP [Yan等]
- MbT [Fan等]
- 找到最有区别的模式
- 搜索问题
- 优化问题
- 扩展
- 挖掘前k个判别模式
- 挖掘近似/加权判别模式
4.15.3. 图的核函数
- 驱动:
- 基于内核的学习方法不需要访问数据点
- 它们依赖于数据点之间的内核功能
- 可以应用于任何复杂的结构,前提是您可以在它们上定义内核函数
- 基本思路:
- 将每个图形映射到一些重要的模式
- 在相应的模式集上定义内核
4.15.4. 基于核函数的分类
- 随机漫步
- 基本思想:计算两个图标之间匹配的随机游动
- 边缘核函数
K ( G 1 , G 2 ) = ∑ h 1 ∑ h 2 p ( h 1 ) p ( h 2 ) K L ( l ( h 1 ) , l ( h 2 ) ) K(G_1, G_2) = \sum\limits_{h_1}\sum\limits_{h_2}p(h_1)p(h_2)K_L(l(h_1), l(h_2)) K(G1,G2)=h1∑h2∑p(h1)p(h2)KL(l(h1),l(h2))
- h 1 h_1 h1和 h 2 h_2 h2是图 G 1 G_1 G1和 G 2 G_2 G2中的路径
- p ( h 1 ) p(h_1) p(h1)和 p ( h 2 ) p(h_2) p(h2)是路径上的可能性分布
- K L ( l ( h 1 ) , l ( h 2 ) ) K_L(l(h_1), l(h_2)) KL(l(h1),l(h2))是路径间的核函数
K L ( l 1 , l 2 ) = { 1 i f l 1 = l 2 2 o t h e r w i s e K_L(l_1,l_2)=\begin{cases} 1 & if\ l1 = l2 \\ 2 & otherwise \end{cases} KL(l1,l2)={12if l1=l2otherwise
4.15.5. 图分类的Boosting方法
决策树桩
- 简单的分类器,其中的最终决定由单个特征决定
- 规则就是元组 < t , y >
- 如果分子包含子结构y,则将其分类为t。
- Gain
h < t , y > ( x ) = { y i f t ⊆ x − y o t h e r w i s e h_{
- 应用提升
g a i n ( < t , y > ) = ∑ i = 1 n y i h < t , y > ( x i ) g a i n ( < t , y > ) = ∑ i = 1 n y i h < t , y > ( x i ) \begin{matrix} gain(
4.16. 图聚类问题
4.16.1. 图压缩
- 提取公共子图并通过将这些子图压缩为节点来简化图
4.16.2. 图/网络聚类问题
- 由数据元素的相互关系组成的网络通常具有基础结构。由于关系很复杂,因此很难发现这些结构:如何弄清楚结构?
- 有了有关谁与谁联系的简单信息,就可以确定具有共同兴趣或特殊关系的个人群体吗?例如,家庭,集团,恐怖分子牢房…
4.16.3. 网络的例子
- 多少个集群?
- 他们应该是多大?
- 最好的分区是什么?
- 是否应将某些观点分开?
4.16.4. 社交网络模型
- 紧密的社会群体或集团中的人认识许多相同的人,不论小组大小
- 成为枢纽的人认识不同组中的许多人,但不属于单个组,例如,政治人物跨多个团体
- 离群的人生活在社会的边缘,例如,隐士认识的人很少,不属于任何群体
4.16.5. 顶点邻居
- 将G(v)定义为顶点的直接邻域,即个人认识的一群人

4.16.6. 结构相似性
- 所需的特征倾向于通过称为结构相似性的度量来捕获
σ ( v , w ) = ∣ Γ ( v ) ∩ Γ ( w ) ∣ ∣ Γ ( v ) ∣ ∣ Γ ( w ) ∣ \sigma(v, w) = \frac{|\Gamma(v) \cap \Gamma(w)|}{\sqrt{|\Gamma(v)||\Gamma(w)|}} σ(v,w)=∣Γ(v)∣∣Γ(w)∣∣Γ(v)∩Γ(w)∣
- 对于集团成员而言,结构相似性很大,而对于中心和离群点而言,结构相似性很小。
4.16.7. 社团
- 社区:它是由个人组成的,因此与组外的人相比,组内的人之间的互动更加频繁,在不同上下文中也称为组,群集,内聚子组,模块
- 社区检测:在网络中发现未明确授予个人组成员身份的组
- 为什么在社交媒体中使用社区?
- 人类是社会的
- 易于使用的社交媒体使人们能够以前所未有的方式扩展社交生活
- 很难认识现实世界中的朋友,但更容易在网上找到志趣相投的朋友
- 节点之间的交互可以帮助确定社区
4.16.8. 社交媒体的社团
- 社交媒体中的两种类型的群体
- 显式群体:由用户订阅组成
- 隐性群体:由社交互动隐式形成
- 一些社交媒体网站允许人们加入群组,是否有必要根据网络拓扑提取群组?
- 并非所有站点都提供社区平台
- 并非所有人都愿意努力加入团体
- 组可以动态变
- 网络交互可提供有关用户之间关系的丰富信息
- 可以补充其他类型的信息,例如 用户资料
- 帮助网络可视化和导航
- 提供其他任务的基本信息,例如 建议请注意,以上三点中的每一个都可以成为研究主题。
4.17. 总结
- 数据挖掘领域通过有效的DM算法证明了其在短生命周期内的实用性。
- 在数据库,化学与生物学,网络等领域有许多应用程序。
- 交易和单图设置都很重要
- 图挖掘是
- 处理为挖掘图数据集而设计的有效算法。
- 途中面临许多硬度问题。
- 快速发展的领域,具有前所未有的发展潜力。
- 随着越来越多的信息存储在复杂的结构中,我们需要为图形数据挖掘开发一套新的算法。
5. 文档分类
- 多语言的替代表示
- Web文档:基于图的模型
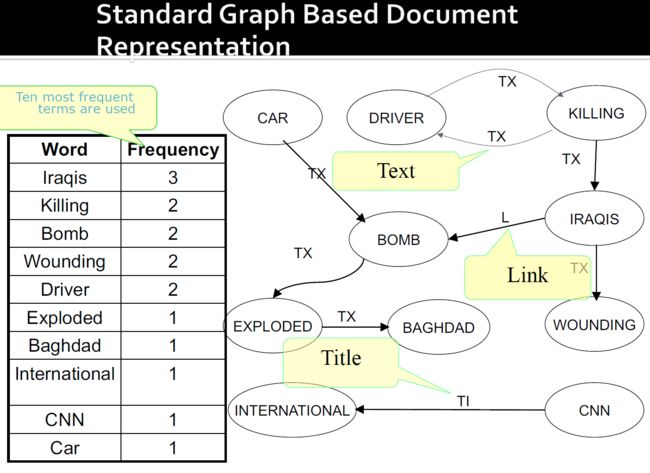
5.1. 基于图模型的网络文档
- 基本思路:
- 每个唯一术语一个节点
- 如果单词B紧跟单词A,则从A到B有一条边:在存在标点符号(句号,问号和感叹号)的情况下,两个单词之间未形成边线
- 通过仅包含最常用的术语来限制图形大小
- 节点和边缘标签的几种变体(请参阅下一张幻灯片)
- 预处理步骤
- 停用词已删除
- 合法化:同一术语的替代形式(单数/复数,过去/现在/将来时等)被合并为最常见的形式
5.2. 标准化表示
- 边缘根据文档部分标记,单词彼此紧跟
- 标题(TI)包含与文档标题和任何提供的关键字(元数据)有关的文本;
- 链接(L)是出现在文档上可点击的超链接中的"锚文本";
- 文本(TX)包含文档中的任何可见文本(这包括锚文本,但不包括标题和关键字文本)
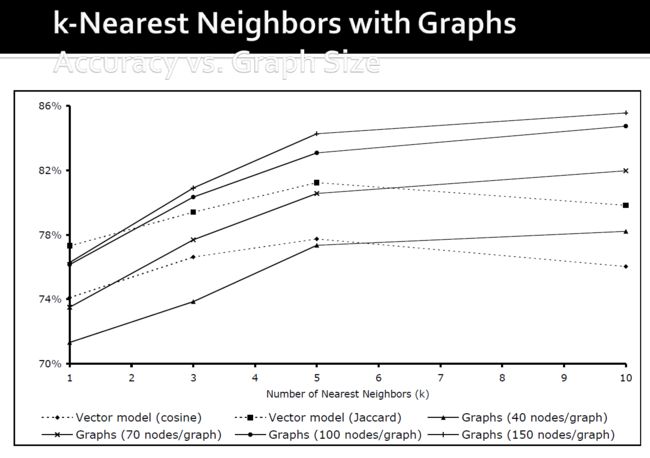
5.3. 使用图进行分类
- 基本思路:
- 挖掘频繁的子图,称其为术语
- 使用TFIDF为文档分配最具特色的术语
- 使用聚类和K近邻分类
5.4. 子图挖掘
- 输入值
- G –有向,唯一节点图的训练集
- C R m i n CR_{min} CRmin:最低分类率
- 输出:与分类相关的子图集
- 流程:
- 对于每个类,找到子图 C R CR CR > C R m i n CR_{min} CRmin
- 将所有子图合并为一组
- 基本假设:与类别相关的子图在特定类别中比在其他类别中更常见
5.5. 计算分类率
- 子图分类率:
C R ( g k ′ ( c i ) ) = S C F ( g k ′ ( c i ) ) ∗ I S F ( g k ′ ( c i ) ) CR(g'_k(c_i)) = SCF(g'_k(c_i)) * ISF(g'_k(c_i)) CR(gk′(ci))=SCF(gk′(ci))∗ISF(gk′(ci))
- S C F ( g k ′ ( c i ) ) SCF(g'_k(c_i)) SCF(gk′(ci)):子图类别 c i c_i ci类中子图 g k ′ g'_k gk′的频率
- I S F ( g k ′ ( c i ) ) ISF(g'_k(c_i)) ISF(gk′(ci)):类别 c i c_i ci中子图 g k ′ g'_k gk′的逆子图频率
- 分类相关功能是最能解释特定类别的功能,该类别比其他所有类别更常见