《Linux C编程实战》笔记:信号的捕捉和处理
Linux系统中对信号的处理主要由signal和sigaction函数来完成,另外还会介绍一个函数pause,它可以用来响应任何信号,不过不做任何处理
signal函数
#include
void (*signal(int signum, void (*handler)(int)))(int);
可以分解为以下几个部分:
signal是一个函数,它接受两个参数:signum和handler。signum是一个整数,表示信号的编号,例如SIGINT表示中断信号。handler是一个指向函数的指针,该函数负责处理收到的信号。
signal 函数返回一个函数指针,该指针指向之前注册的信号处理函数。
写成这样可能更好理解,我看我的系统里的源码也是长这样的:
#include
typedef void (*sighandler_t)(int);
sighandler_t signal(int signum,sighandler_t handler); sighandler_t指的类型是一个函数指针,指向的函数是一个int类型参数,返回值为void类型。
signal会根据参数signum指定的信号编号来设置该信号的处理函数。当指定的信号到达时就会跳转到参数handler指定的函数执行。如果参数handler不是函数指针,则必须是常数SIG_IGN (忽略该信号)或SIG_DFL (对该信号执行默认操作)。handler 是一个函数指针,它所指向的函数的类型是sighandler t,即它所指向的函数有一个int型参数,且返回值的类型为void。
signal函数执行成功时返回以前的信号处理函数指针,当有错误发生时返回SIG_ERR(即-1)。
注意:SIGKILL和SIGSTOP这两个信号不能被捕捉或忽略。
示例程序1
该示例程序演示了signal的使用
#include
#include
void handler_sigint(int signo){
printf("recv SIGINT\n");
}
int main(){
if(signal(SIGINT,handler_sigint)==SIG_ERR){
perror("Error setting signal handler");
return 1;
}
while(1);
return 0;
} 首先使用signal安装信号SIGINT的处理函数,然后进入死循环。当接收到SIGINT信号时,程序自动跳转到信号处理函数执行,打印出提示信息,然后返回主函数继续死循环。
SIGINT这个信号按Ctrl+C就可以产生了,信号的介绍可看前一篇《Linux C编程实战》笔记:Linux信号介绍-CSDN博客
执行结果如下:

最后按下Ctrl+\组合键向进程发送SIGQUIT信号。由于程序本身没有处理SIGQUIT信号,按照默认处理方式,进程退出。
sigaction函数
sigaction函数可以用来检查或设置进程在接收信号时的动作。函数原型如下
#include
int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact);
参数说明:
signum: 要处理的信号编号。act: 一个指向struct sigaction结构的指针,指定新的信号处理方式。oldact: 一个指向struct sigaction结构的指针,用于存储之前的信号处理方式。
sigaction会根据参数signum指定的信号编号来设置信号的处理函数。参数signum可以是SIGKILL和SIGSTOP以外的任何信号。如果参数act不是空指针,则为signum设置新的信号处理函数;如果oldact不是空指针,则旧的信号处理函数将被存储在oldact中。struct sigaction的定义如下:
struct sigaction {
void (*sa_handler)(int);
void (*sa_sigaction)(int, siginfo_t *, void *);
sigset_t sa_mask;
int sa_flags;
void (*sa_restorer)(void);
};
其中,sa_handler 是用于指定信号处理函数的指针,sa_mask 是一个信号集,用于指定在信号处理函数执行期间要阻塞的信号,sa_flags 是用于设置信号处理的一些标志,sa_restorer 是用于指定一个恢复函数。
sa_handler和sa_sigaction在某些体系结构上被定义为共用体,即这两个值在某一时刻只有一个有效。
数据成员sa_restorer 已经作废,不再使用,POSIX标准也不支持该数据成员。
sa_handler可以是常数SIG_DFL或SIG_IGN,或者是一个信号处理函数的函数名。信号处理函数只
有一个参数即信号编号。该参数和参数sa_sigaction实际上都是函数指针。
sa_ sigaction也是用来指定信号signum的处理函数,但是它有3个参数,第一个参数是信号编号;
第二个参数是一个指向siginfo_t结构的指针;第三个参数是一个指向任何类型的指针,一般不使用。
sa_mask成员声明了一个信号集,在调用信号捕捉函数之前,该信号集会增加到进程的信号屏蔽码中,新的信号屏蔽码会自动包括正在处理的信号(sa_flags未指定SA_NODEFER或SA_NOMASK).当从信号捕捉函数返回时,进程的信号屏蔽码会恢复为原来的值。因此,当处理一个给定的信号时,如果这种信号再次发生,那么它会被阻塞直到本次信号处理结束为止。若这种信号发生了多次,则对于不可靠信号,它只会被阻塞一次, 即本次信号处理结束以后只会再处理一次(相当于丢失了信号);对于可靠信号(实时信号),则会被阻塞多次,即信号不会丢失,信号发生了多少次就会调用信号处理函数多少次。
sa_flags成员用来说明信号处理的一些其他相关操作。
这个字段的取值可以是以下几个常量之一,或者它们的按位组合:
SA_RESETHAND或SA_ONESHOT: 信号处理程序执行一次后,就恢复为默认的处理方式(SIG_DFL),即重新设置为系统默认的信号处理函数。这样,下次再接收到相同信号时,会再次调用用户设置的处理函数。
SA_RESTART: 如果系统调用由信号中断,那么自动重启该系统调用。这通常用于防止由信号中断的系统调用在中断后不会继续执行,而是返回错误。
SA_NODEFER或SA_NOMASK: 在信号处理程序执行期间,不阻塞同样的信号。也就是说,如果进程在执行信号处理程序时再次收到相同的信号,处理程序会被再次调用。默认情况下,执行信号处理程序时,相同的信号会被阻塞,直到处理完成。
SA_NOCLDSTOP: 如果设置了这个标志,子进程的停止状态(stopped)不会生成SIGCHLD信号。通常,当子进程停止或继续执行时,会发送SIGCHLD信号给父进程。
SA_SIGINFO: 如果设置了这个标志,信号处理程序是sa_sigaction而不是sa_handler。sa_sigaction允许更多的信息传递给信号处理程序。这些标志可以通过按位或(
|)的方式组合使用。
当使用三参数的sa_sigaction来指定信号处理函数时,它的第二个参数可以用来传递数据,其定义如下:
#include
struct siginfo_t {
int si_signo; // 信号编号
int si_errno; // 与信号相关的错误编号
int si_code; // 信号代码
pid_t si_pid; // 发送信号的进程ID
uid_t si_uid; // 发送信号的用户ID
int si_status; // 子进程的退出状态或信号
clock_t si_utime; // 用户态运行时间
clock_t si_stime; // 内核态运行时间
sigval_t si_value; // 信号值
int si_int; // 附加的整数值
void* si_ptr; // 附加的指针值
int si_overrun; // 未处理的timer信号的数量
int si_timerid; // 产生timer信号的timer ID
void* si_addr; // 发生错误的内存地址
long si_band; // 通用的事件描述
int si_fd; // 文件描述符
short si_addr_lsb; // 最低有效字节的地址
int si_tid; // 产生signal的线程ID
struct {
int si_trapno; // 陷阱的编号
short si_addr_lsb; // 最低有效字节的地址(覆盖si_addr_lsb)
} si_perfdata;
};
其中,所有的信号都有si_signo、si_errno和si_code 这3个数据成员,分别表示信号编号,errno值和信号产生的原因。其他成员则根据信号的不同含有不同的意义,接收信号的进程只能读这些成员的值,而不能进行设置。si_int 和si_ptr 可以用来传递数据,后面会演示其用法。其余的数据成员则根据不同的信号存在不同的组合,了解即可。
sigaction函数执行成功时返回0,当有错误发生时返回-1,错误代码存入errno。
注意:Linux下signal函数是由sigaction实现的。
示例程序2
#include
#include
#include
int temp=0;
void handler_sigint(int signo){
printf("\nrecv SIGINT\n");
sleep(5);
temp+=1;
printf("the value of temp is:%d\n",temp);
printf("in handler_sigint,after sleep\n");
}
int main(){
struct sigaction act;
act.sa_handler=handler_sigint;
act.sa_flags=SA_NOMASK;//允许嵌套
sigaction(SIGINT,&act,nullptr);
while (1);
return 0;
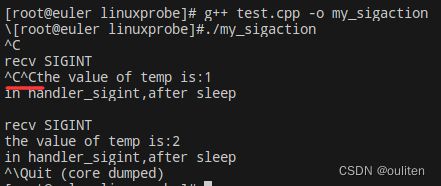
} 运行结果

主要看第二和第三次按下Ctrl+C。我们设置的是按下Ctrl+C时,信号的处理函数会睡5s,第三次Ctrl+C正是在这5s内按下的,由于我们设定了sa_flags的值为SA_NOMASK,因此程序又一次响应了SIGINT,程序从sleep()处嵌套调用信号处理函数handler_sigint,再一次打印出"recv SIGINT",睡眠5s后,将temp的值打印出来并返回到本次信号处理程序的跳入点sleep()处,然后再打印出temo的值并返回到主函数。
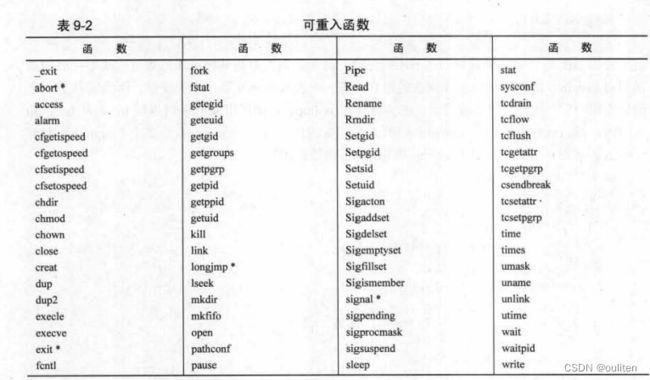
从程序执行可以看到,temp 的值随着信号处理函数被调用的次数的增加而递增,而由于实际应用中信号总是随机发生的,这样temp的值也会随机变化。如果main函数或其他地方还用到了这个全局变量,则程序将产生不可预料的结果。我们称这种数据会被破坏的函数为不可重入函数。编写信号处理程序时要注意不要使用不可重入函数。一般来说,满足下列条件之一的函数是不可重入的。
使用了静态的数据结构,如getgrgid(),全局变量等。
函数实现时,调用了malloc或者 free函数。
函数实现时,使用了标准I/O函数。
将程序中的SA_NOMASK这一行去掉,重新编译运行,执行时快速按下Ctrl+c三次以上,结果如下
可以看到确实按了三次Ctrl+c,但是函数只执行了两次,因为SIGINT是不可靠信号,不可靠信号不支持排队,从而有可能丢失信号。第三个信号就丢失了。
pause函数
pause函数使调用进程挂起直至捕捉到一个信号
#include
int pause(void); pause函数会令目前的进程暂停,知道被信号所中断。该函数只返回-1并将errno设置为EINTR。