移动机器人路径规划minimum_snap(MATLAB)笔记整理
minimum snap轨迹规划
本文代码以及其他概念可参考
https://blog.csdn.net/q597967420/article/details/76099491
本文仅对该博文程序部分做进一步解释
定义路径点、阶次
轨迹一般用n阶多项式(polynomial)来表示,即
p(t)= p 0 + p 1 ∗ t + p 2 ∗ t 2 … … + p n ∗ t n = ∑ i = 0 n p i ∗ t i p0+p1*t+p2*t^2……+pn*t^n=\sum_{i=0}^{n}pi*t^i p0+p1∗t+p2∗t2……+pn∗tn=∑i=0npi∗ti
但整段轨迹通常难以用一个多项式表示,所以一般将其分为k段多项式表示。
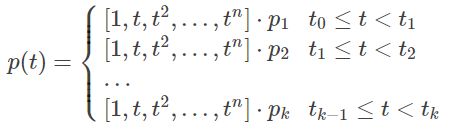
机器人的平面运动路径也应该由x和y两个多项式构成,所以共有2k段多项式。
已知条件:起始点和终点的位置p、速度v、加速度a、加加速度j,每段多项式在连接点处的位置p已知,且在连接点处光滑(pvaj相等)。每一个分段都是多项式;每个分段的多项式都是相同的阶次,这样对于问题的求解比较简单;每一段的时间间隔都是已知的

限制条件数量: 4+4+(k-1)=k+7
首末pvaj加中间点位置
未知数数量:(N+1)*k (N为多项式阶数,k为路径的段数)
k+7<=(N+1)*k
则N>= 7 / k 7/k 7/k 表明段数越多,则提供的阶次越低。k最少是1, 所以minisnap求解中每段多项式至少有7阶,每段有八个未知数。
clc;clear;close all;
path = ginput() * 100.0; % 返回几个点的(x,y)坐标
n_order = 7;% 多项式的阶次 mini_snap为7 ,mini_jerk为5
n_seg = size(path,1)-1; % n_seg 代表路径的段数
n_poly_perseg = (n_order+1); % 多项式方程的未知量个数
时间分配
时间分配一般有两种,一种是按路径长度分配时间,一种是按梯形运动方式分配时间,此处为图简便可直接将每段时间赋值1。
% calculate time distribution in proportion to distance between 2 points
dist = zeros(n_seg, 1);
dist_sum = 0;
T = 25;
t_sum = 0;
for i = 1:n_seg
dist(i) = sqrt((path(i+1, 1)-path(i, 1))^2 + (path(i+1, 2) - path(i, 2))^2);
dist_sum = dist_sum+dist(i);
end
for i = 1:n_seg-1
ts(i) = dist(i)/dist_sum*T; %前面n-1段路程都是按距离/总距离来计算时间
t_sum = t_sum+ts(i);
end
ts(n_seg) = T - t_sum; %而最后一段是总的时间减去前面所有时间之和
% or you can simply set all time distribution as 1
% ts=ones(5,1);
求解多项式系数
%求解x轴和y轴的多项式系数
poly_coef_x = MinimumSnapQPSolver(path(:, 1), ts, n_seg, n_order);
poly_coef_y = MinimumSnapQPSolver(path(:, 2), ts, n_seg, n_order);
function poly_coef = MinimumSnapQPSolver(waypoints, ts, n_seg, n_order)
start_cond = [waypoints(1), 0, 0, 0]; %waypoints为 path(:, 1)即第一个点,而先对x轴求多项式系数,则waypoints(1)只提取第一个点的x轴坐标
end_cond = [waypoints(end), 0, 0, 0];
% STEP 1: compute Q of p'Qp
Q = getQ(n_seg, n_order, ts);
% STEP 2: compute Aeq and beq
[Aeq, beq] = getAbeq(n_seg, n_order, waypoints, ts, start_cond, end_cond);
f = zeros(size(Q,1),1);
poly_coef = quadprog(Q,f,[],[],Aeq, beq); %poly_coef 为n段分轨迹多项式式子的系数的组合,长度为n_seg*8,每段8个系数
end
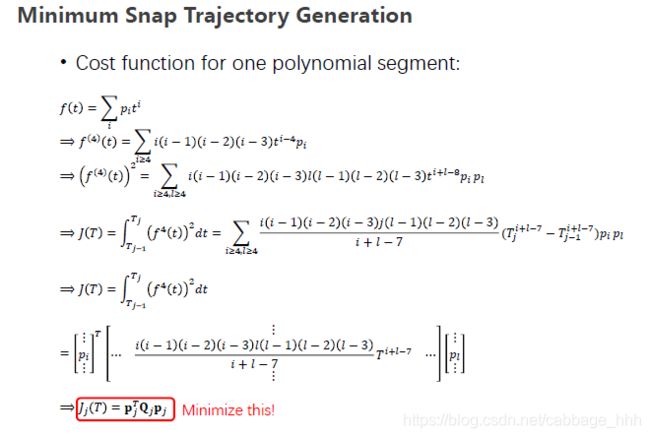
下面两图源自高飞老师PPT及上文参考博文中摘录
function Q = getQ(n_seg, n_order, ts)
Q = [];
for j = 1:n_seg %一共有n_seg段
Q_k = zeros(8,8); %minsnap阶数是7,系数为8
% STEP 1.1: calculate Q_k of the k-th segment
for i=4:n_order
for l=4:n_order
L = factorial(l)/factorial(l-4);
I = factorial(i)/factorial(i-4);
Q_k(i+1,l+1) = L*I/(i+l-7);
end
end
Q = blkdiag(Q, Q_k);
end
end
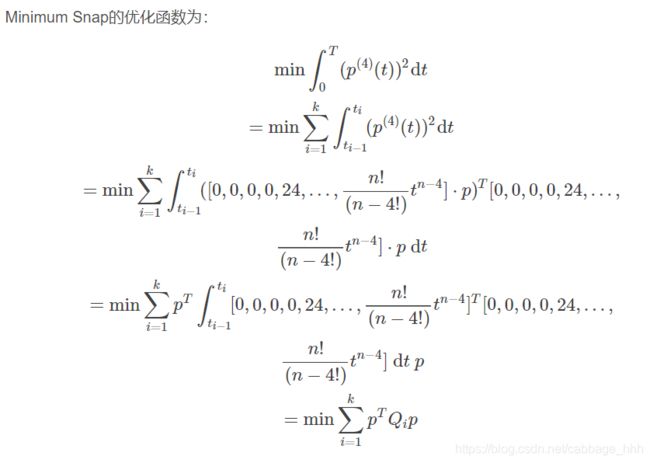
下为 m i n ∑ i = 1 k p T Q i p min\sum_{i=1}^{k}p^TQip min∑i=1kpTQip的等式约束,即1.起始点和终点的位置p、速度v、加速度a、加加速度j 已知。
2.每段多项式在连接点处的位置p已知。
3.在连接点处前后两段多项式pvaj相等
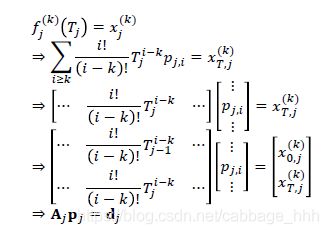
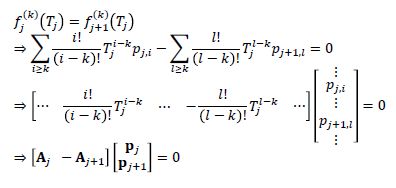
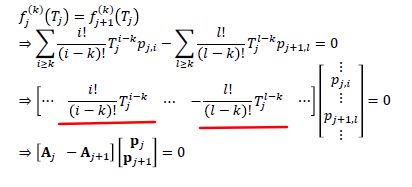 这里两个式子描述的是段与段之间的连接点,这个连接点在前后两段多项式中应该p v a j数值一样。两个式子时间Tj相同,但是却一个乘以系数pj,i,一个乘以系数pj+1,i ,在前一个多项式中,此连接点处于末尾点,时间为ts,而后一个多项式中,连接点处于起始点,时间为0。注意!不同的轨迹段享有不一样的多项式方程系数,所以时间计算可以不共享,每一段的起始点都可以视为这一段的时间0,这样计算每一段的p,v,a,j时,就会发现系数为阶乘。
这里两个式子描述的是段与段之间的连接点,这个连接点在前后两段多项式中应该p v a j数值一样。两个式子时间Tj相同,但是却一个乘以系数pj,i,一个乘以系数pj+1,i ,在前一个多项式中,此连接点处于末尾点,时间为ts,而后一个多项式中,连接点处于起始点,时间为0。注意!不同的轨迹段享有不一样的多项式方程系数,所以时间计算可以不共享,每一段的起始点都可以视为这一段的时间0,这样计算每一段的p,v,a,j时,就会发现系数为阶乘。
function [Aeq beq]= getAbeq(n_seg, n_order, waypoints, ts, start_cond, end_cond)
n_all_poly = n_seg*(n_order+1);%未知量总数
% p,v,a,j constraint in start,
Aeq_start = zeros(4, n_all_poly);
beq_start = zeros(4, 1);
% STEP 2.1: write expression of Aeq_start and beq_start
for k= 0:3
Aeq_start(k+1,k+1) = factorial(k);
%求4个阶次的情况,起始点时间t为0,那么位置就是p0,速度就是p1,加速度就是2p2,多项式系数是我二次规划要求的未知数,
%所以,此处起始点每个阶次,要求的p前的常数项系数为n的阶乘
end
beq_start = start_cond';
% p,v,a constraint in end
Aeq_end = zeros(4, n_all_poly);
beq_end = zeros(4, 1);
% STEP 2.2: write expression of Aeq_end and beq_end
start_idx_2 = (n_order + 1)*(n_seg - 1);
for k=0 : 3
for i=k : 7 %总共0-3 4个阶次,k到7意思是八个系数求导之后,前面几个系数都消失了,
Aeq_end(k+1,start_idx_2 + 1 + i ) = factorial(i)/factorial(i-k)*ts(n_seg)^(i-k);
end
end
beq_end = end_cond';
% position constrain in all middle waypoints
Aeq_wp = zeros(n_seg-1, n_all_poly);
beq_wp = zeros(n_seg-1, 1);
% STEP 2.3: write expression of Aeq_wp and beq_wp
for i=0:n_seg-2 %一共n_seg-1个中间点
start_idx_2 = (n_order + 1)*(i+1); %前面几段有多少个系数
Aeq_wp(i+1,start_idx_2+1) = 1;%
beq_wp(i+1,1) = waypoints(i+2);%右端为 本段分轨迹的末点的坐标(已知量)
end
% position continuity constrain between each 2
% segments,连接点处前后两段在此点的位置、速度、加速度、加加速度相等
Aeq_con = zeros((n_seg-1)*4, n_all_poly);
beq_con = zeros((n_seg-1)*4, 1);
% STEP 2.4: write expression of Aeq_con_p and beq_con_p
for k=0:3
for j=0:n_seg-2 %n_seg-1个中间点
for i = k:7 %循环顺序不重要,只是遍历 n-1个中间点,的4个阶次pvaj,以及使i>=7的情况下遍历8次
start_idx_1 = (n_seg-1)*k;
start_idx_2 = (n_order+1)*j;
Aeq_con(start_idx_1 + j + 1,start_idx_2 + i+1)=...
factorial(i)/factorial(i-k)*ts(j+1)^(i-k); %代表同一个连接点在前一段的多项式方程的末尾点pvaj(求k阶导),此时时间在前一段中为ts
if(i == k) %因为后一段的起始点时间为0,所以求导后,除了i==k时,其他部分都为0,所以不用算
Aeq_con(start_idx_1+j+1,start_idx_2+(n_order+1)+i+1) = ...
-factorial(i);%代表同一个连接点在后一段的多项式方程中的计算,此时时间在后一段中为0
end %两者相减等于0 % %因为在后一个连接点的多项式中,t为0,所以pi前的系数只有阶乘
end
end
end
Aeq = [Aeq_start; Aeq_end; Aeq_wp; Aeq_con];
beq = [beq_start; beq_end; beq_wp; beq_con];
end
绘制minimum snap的路径
% display the trajectory
X_n = [];
Y_n = [];
k = 1;
tstep = 0.01;
for i=0:n_seg-1
% STEP 3: get the coefficients of i-th segment of both x-axis
% and y-axis
start_idx = n_poly_perseg * i;
Pxi = poly_coef_x(start_idx + 1 : start_idx + n_poly_perseg,1);
Pxi = flipud(Pxi);%得到多项式系数
Pyi = poly_coef_y(start_idx + 1 : start_idx + n_poly_perseg,1);
Pyi = flipud(Pyi); %多项式从阶数高的开头
for t = 0:tstep:ts(i+1) %以0.01的步长遍历所有时间 (ts(i+1)就是时间结尾)
X_n(k) = polyval(Pxi, t); %计算多项式Pxi在t点处的每一个值
Y_n(k) = polyval(Pyi, t);
k = k + 1;
end
end
plot(X_n, Y_n , 'Color', [0 1.0 0], 'LineWidth', 2); %画出所有轨迹
hold on
scatter(path(1:size(path, 1), 1), path(1:size(path, 1), 2));