用C#编写摄影测量后方交会求外方位元素
程序源码程序源码下载地址
https://download.csdn.net/download/u011713916/11743497
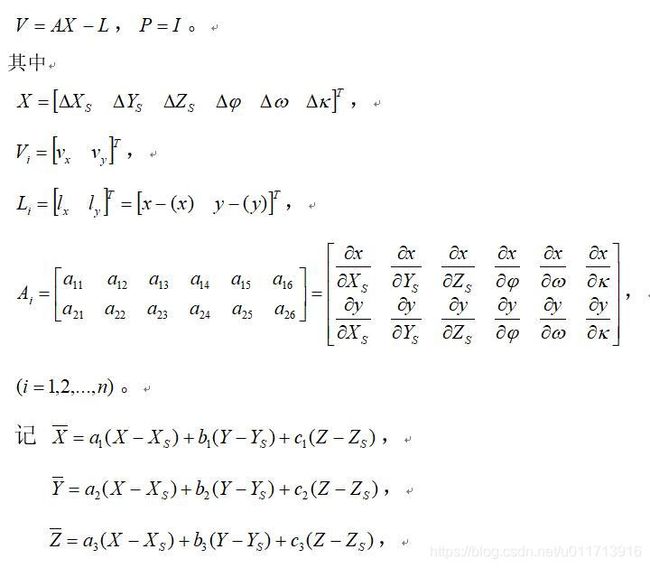
实验原理
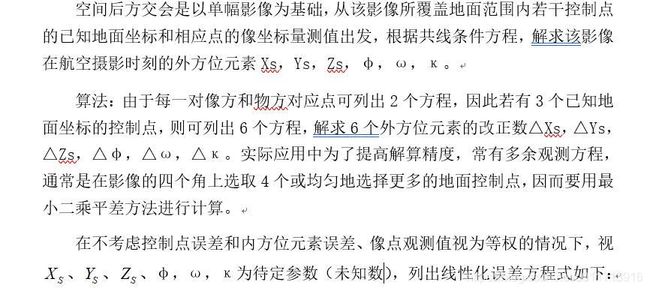
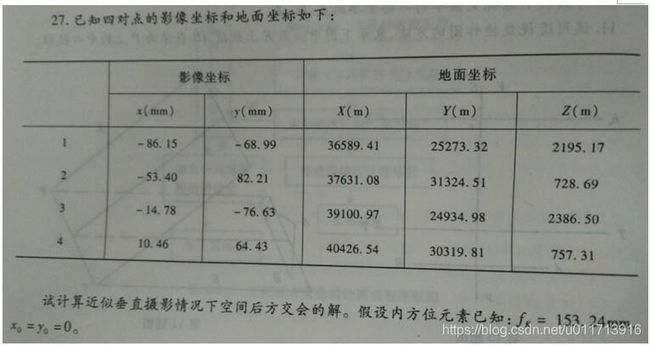
**详细题目:
**
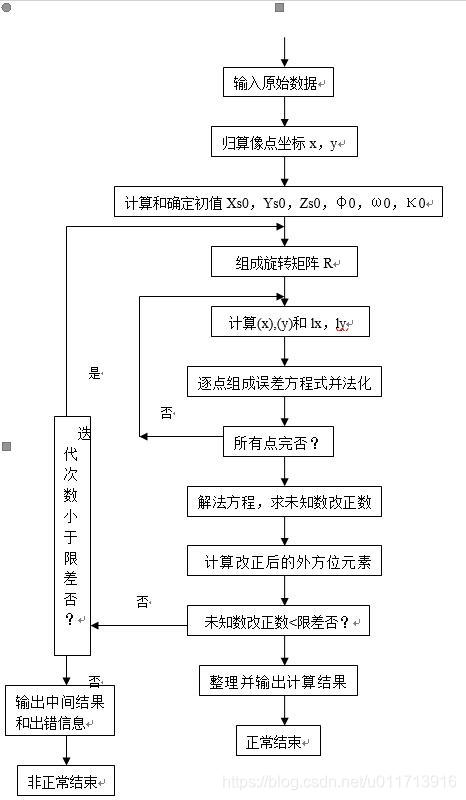
编程思想:
具体代码
我使用了MathNet.Numerics.dll矩阵库,功能强大,还可以求解病态矩阵
MathNet.Numerics.dll
完整源码:
System;
using System.Net.Http.Headers;
using System.Xml.Linq;
using MathNet.Numerics.LinearAlgebra.Double;
using MathNet.Numerics.LinearAlgebra.Generic;//调用矩阵库
namespace The_Rescetion
{
class Program
{
static void Main(string[] args)
{
//求单位权中误差函数
double EeMartix (double[,]B,double[]ll,double[]xx,int i,int j)//观测值数个数,J//求得未知数个数//B
{
double[] v=new double[i];//创造数组存储V;
double q0=0;
double Tmp = 0;//建立临时存储变量
for (int l = 0; l < i; l++)//计算V=B*X—L
{
for (int m = 0; m < j; m++)
{
Tmp = Tmp +B[l, m] * xx[m];
}
v[l] = Tmp-ll[l];
Tmp = 0;
}
for (int l = 0; l < i; l++)//计算V*VT
{
Tmp += v[l] * v[l];
}
q0 = Math.Sqrt(Tmp / (2 * i - 6));//单位权中误差计算公式
return q0;//返回中误差
}
void print( double[] a)//定义打印接口函数
{
for (int i = 0; i < a.Length; i++)
{
Console.WriteLine(" {0}", a[i]);
}
}
double Pinjun(double[] a)//此函数功能是取平均值
{
double tmp=0;
for (int i = 1; i < a.Length; i++)
{
tmp = tmp + a[i];
}
return (tmp / 4.0);
}
/*double[] x = new double[4];
double[]y=new double[4];
double[] X = new double[4];
double[] Y = new double[4];
double[] Z = new double[4];*/
double[] x = new[] {-86.15, -53.40, -14.78, 10.46};
double[] y = new []{-68.99,82.21 ,-76.63,64.43};
double[] X = new[] { 36589.41,37631.08,39100.97,40426.54};
double[] Y = new[] { 25273.32,31324.51,24934.98,30319.81};
double[] Z = new[] {2195.17, 728.69, 2386.50, 757.31};
double H = 6941.77;
double f = 153.24;
/* Console.WriteLine("按列输入x");
Fuzhi(x);
Console.WriteLine("按列输入y");
Fuzhi(y);
Console.WriteLine("按列输入X");
Fuzhi(X);
Console.WriteLine("按列输入Y");
Fuzhi(Y);
Console.WriteLine("按列输入Z");
Fuzhi(Z);
Console.WriteLine("输入航高");
double H = Convert.ToDouble(Console.ReadLine());
Console.WriteLine("输入f");
double f= Convert.ToDouble(Console.ReadLine());*/
double Xstart=Pinjun(X) ;//赋予初值
double Ystart =Pinjun(Y);
double Zstart = H;//为航高
double q=0, w=0, k = 0;//假设为垂直观测
//double rad = Math.PI/360/60;
double rad = 0.000000001;
Console.WriteLine("X的初始值:{0}\nY的初始值:{1}\nZ的初始值:{2}\n",Xstart,Ystart,Zstart);
//
//
double a1, a2, a3, b1, b2, b3, c1, c2, c3;//R转角矩阵
while (true)//迭代
{a1 = Math.Cos(q) * Math.Cos(k) - Math.Sin(q) * Math.Sin(w) * Math.Sin(k);
a2=-Math.Cos(q)*Math.Sin(k)- Math.Sin(q) * Math.Sin(w) * Math.Sin(k);
a3 = -Math.Sin(q) * Math.Cos(w);
b1 = Math.Cos(w) * Math.Sin(k);
b2 = Math.Cos(w) * Math.Cos(k);
b3 = -Math.Sin(w);
c1=Math.Sin(q)*Math.Cos(k)+ Math.Cos(q) * Math.Sin(w) * Math.Sin(k);
c2 = -Math.Sin(q) * Math.Sin(k) + Math.Cos(q) * Math.Sin(w) * Math.Cos(k);
c3 = Math.Cos(q) * Math.Cos(w);
//
var R=new DenseMatrix(new [,]{{a1,a2,a3},{b1,b2,b3},{c1,c2,c3}});//打印旋转矩阵
// Console.WriteLine("旋转矩阵R为:\n{0}",R);
//求像点近似值
double[] l1 = new double[4];
double[] l2 = new double[4];
double[] l3 = new double[4];
double[] l4= new double[4];
double[] l5 = new double[4];
double [,]al=new double[8,6];
double[] ll = new double[8];
//
//
//
for (int i = 0; i < 4; i++)
{
//求像点近似值
l1[i] = a1 * (X[i] - Xstart) + b1 * (Y[i] - Ystart) + c1 * (Z[i] - Zstart);
l2[i] = a2 * (X[i] - Xstart) + b2 * (Y[i] - Ystart) + c2 * (Z[i] - Zstart);
l3[i] = a3 * (X[i] - Xstart) + b3 * (Y[i] - Ystart) + c3 * (Z[i] - Zstart);
l4[i] = -f * l1[i] / l3[i];//x点的近似坐标
l5[i] = -f * l2[i] / l3[i];//y点的近似坐标
}
for (int i = 0; i < 4; i++)//求系数矩阵A
{
al[2 * i ,0] = (a1 * f + a3 * (x[i])) / l3[i];//a11
al[2 * i ,1] = (b1 * f + b3 * (x[i] )) / l3[i];//a12
al[2 * i ,2] = (c1 * f + c3 * (x[i] )) / l3[i];//a13
/*a14 */ al[2 * i,3] = (y[i]) * Math.Sin(w) - Math.Cos(w) * ((x[i] ) *( (x[i]) * Math.Cos(k) - (y[i] ) * Math.Sin(k)) / f + f * Math.Cos(k));
/*a15 */al[2 * i ,4] = -f * Math.Sin(k) - (x[i] ) * ((x[i]) * Math.Sin(k) + (y[i] ) * Math.Cos(k)) / f;
al[2 * i ,5] = (y[i] );//a16
al[2 * i+1,0] = (a2 * f + a3 * (y[i] )) / l3[i];
al[2 * i+1,1] = (b2 * f + b3 * (y[i] )) / l3[i];
al[2 * i+1,2] = (c2 * f + c3 * (y[i] )) / l3[i];
al[2 * i+1,3] = -(x[i] ) * Math.Sin(w) - Math.Cos(w) * ((y[i] ) * ((x[i] ) * Math.Cos(k) - (y[i] ) * Math.Sin(k)) / f - f * Math.Sin(k));
al[2 * i+1,4] = -f * Math.Cos(k) - (y[i] ) * ((x[i] ) * Math.Sin(k) + (y[i] ) * Math.Cos(k)) / f;
al[2 * i+1,5] = -(x[i] );
}
for (int i = 0; i < 4; i++)//求x-x0的矩阵L
{
ll[2 * i] = x[i] - l4[i];
ll[2 * i + 1] = y[i] - l5[i];
}
var aMatrix=new DenseMatrix(al);//创建矩阵A
var xmatrix = aMatrix.Transpose()*aMatrix;//xmartix=At*A
var Xmatrix = xmatrix.Inverse() * aMatrix.Transpose();//Xmartix=(At*A)'*At
double[,]XXtmp=new double[6,8];
XXtmp = Xmatrix.ToArray();//矩阵转化为二维数组
double[]XXfinally=new double[6];//(At*A)'*At*L最终得出X的变化率
double tmp = 0;
for (int i = 0; i < 6; i++)
{
for (int j = 0; j < 8; j++)
{
tmp = tmp + XXtmp[i, j] * ll[j];
}
XXfinally[i] = tmp;
tmp = 0;
}
//重新校正初值
Xstart+= XXfinally[0];
Ystart+= XXfinally[1];
Zstart += XXfinally[2];
q += XXfinally[3];
w += XXfinally[4];
k += XXfinally[5];
double[] newtest = new[] { Xstart, Ystart, Zstart, q, w, k };//将新的初值存入数组
if(XXfinally[3] <=rad && XXfinally[4] <= rad && XXfinally[5] <= rad)//迭代判断条件
{
Console.WriteLine("X,Y,Z,Q,W,k为:\n[");
print(newtest);//输出最后的X矩阵
Console.WriteLine("]");
Console.WriteLine("解为:\nXs={0}\nYs={1}\nZs={2}\n",newtest[0], newtest[1], newtest[2]);
Console.WriteLine("旋转矩阵R为:\n{0}", R);
Console.WriteLine("精度评定求得中误差为:");
Console.WriteLine(EeMartix(al, ll, XXfinally, 8, 6));
break;
}
}
Console.ReadKey();
}
}
}
此代码可以修改为类直接调用,直接赋予初值数组属性即可。
支持原创,转载必须说明
——By shiZwen 2019.9.10