论文解读--Impact of ADC clipping and quantization of phase-modulated 79GHz CMOS radar
ADC限幅和量化对相位调制79 GHz CMOS雷达的影响
摘要
宽带调相连续波雷达具有吸引人的特性,但需要非常高速的模数转换器(ADC)。为了保持这些ADC的功耗可接受,它们的分辨率必须保持尽可能低。我们研究了典型的79 GHz人员检测场景所需的ADC分辨率。该分析基于端到端的Matlab仿真链进行的仿真,考虑到波形特性、芯片实现、传播效果、目标和环境。我们得出结论,在考虑的场景中,4位ADC是足够的。这一结果表明,在先进的CMOS节点上实现完整的79 GHz雷达系统芯片是可行的,可以在汽车、工业和消费产品中实现广泛的新应用。
1 介绍
相位调制连续波(PMCW)雷达又称相位编码雷达[1],是一种扩频雷达。它的扩展序列,也称为编码,由二进制符号组成,这些符号被映射到连续射频(RF)载波的0度和180度相移。二进制序列通常被称为伪噪声(PN)序列,而双相映射也被称为直接序列调制。
在雷达性能和实现简单性方面,PMCW都具有吸引人的特性。对于雷达性能,我们假设已经进行了适当的编码选择[2]。在这种情况下,PMCW可以有一个非常清晰的,类似图钉的模糊函数,这意味着没有距离-多普勒模糊。其次,多输入多输出(MIMO)雷达可以在编码域实现,从而在给定数量的天线路径下获得更高的角分辨率。第三,由于其扩频特性,PMCW具有固有的抗干扰能力。在实现简单性方面,PMCW既不需要高速、快速沉降的频率合成器,也不需要像调频连续波(FMCW)雷达那样需要高度线性的合成器[3]。最后一个优点是很容易将诸如汽车识别号码之类的信息嵌入到PMCW雷达信号中。
宽带PMCW雷达的一个主要缺点是其基带带宽非常大:与FMCW系统不同,它总是等于射频带宽的一半。例如,使用全部4GHz可用带宽的79 GHz雷达[4]可以实现3.75 cm的距离分辨率,但这要求ADC的采样率至少为每秒4千兆采样(Gsps)。因此,必须保持ADC分辨率尽可能低,以保持可接受的功耗。
在本文中,我们研究了79 GHz PMCW雷达用于行人检测所需的ADC分辨率,如[5]中提出的系统。如果ADC分辨率可以保持在可接受的低水平,那么在纳米CMOS技术中实现完整的雷达片上系统(SoC)就变得可行[6],同时集成ADC[7]和必要的数字基带处理。这种片上系统(SoC)有可能在大批量生产中大幅降低功耗、外形尺寸和成本,从而在汽车、有意识建筑、智慧城市和消费设备中开辟大量新应用。
本文组织如下。在第二节中,我们简要介绍了PMCW系统。然后我们在第四节讨论ADC相关的主要影响。接下来,在第五节给出仿真结果和讨论,最后在第六节得出结论。
2 考虑的PMCW系统
所考虑的79 GHz PMCW雷达等效系统级框图如图1所示。仅说明了主要的接收器处理模块:
相关器:信号在一组相关器中进行相关。我们假设相关器间距等于距离分辨率。序列长度为Lc。
相干累加器:为了提高信噪比,在累加器中相干累加M个相关器输出。
N点FFT:对每个距离门进行FFT引擎处理,提取多普勒域信息。
总停留时间Td由
Td = Tc*Lc*M*N (1)
给出,其中Tc为芯片持续时间。
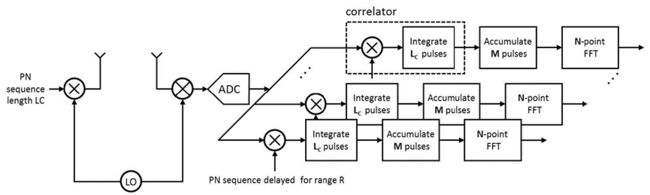
图1 考虑的PMCW雷达系统模型
表1显示了本研究中使用的系统级参数。对于人员检测,我们的目标是0.2 m/s的多普勒速度分辨率,这相当于在79 GHz下的停留时间约为10 ms。在这段时间内,以7.5m/s的速度运动的目标可以穿越75mm的距离,因此选择7.5m/s作为最大可观测多普勒速度。将多普勒分辨率与最大多普勒速度相结合,可得到N = 128的FFT大小。从(1)中,假设Lc = 1000以达到所需的不模糊距离[2],我们得出M = 150。

3 链路预算分析
为了评估整个系统的信号和噪声水平,我们从基于雷达方程的链路预算分析开始:
 (2)
(2)
式中PR为接收信号功率,PT为发射功率,GT和GR为发射和接收天线增益,λ为信号波长,σ为目标雷达截面(RCS),R为目标距离。我们假设PT = 10 dBm [6], GT = GR = 0 dB,因为我们设想天线具有宽视场,并在此因素中考虑了天线馈电损耗。当我们的目标人检测时,我们设置σ=-8 dBsm[8],我们设计的距离R=30 m。给定这些参数,接收功率可以小到PR=-140 dBm。
在噪声系数(NF)为6 dB的接收器输出的4 GHz宽带(由未滤波的2 Gsps序列占用)的热噪声功率约为-70 dBm。这些数字清楚地表明需要高数字处理增益。FFT前的处理增益为:
![]() (3)
(3)
而FFT处理的处理增益为:
![]() (4)
(4)
使FFT后的总处理增益等于:
![]() (5)
(5)
由于我们的目标是完整的雷达SoC,因此可以安全地假设ADC输入端的最大信号是Tx到Rx溢出,也称为泄漏。实际上,如果芯片和封装可以设计成可以达到-40 dB的溢出电平,并且可以在芯片上产生-20 dB的额外抑制,那么在ADC输入端将存在-50 dBm的溢出功率。这大致对应于1m处20 dBsm目标的功率,因此可以安全地假设溢出是ADC输入端的最大信号。
4 主要的ADC相关影响:限幅,量化和抖动
如前所述,选择尽可能低的Gsps ADC分辨率以保持功耗可接受是至关重要的。然而,更少的比特会导致更高的量化噪声。对于覆盖ADC满量程的正弦信号,量化噪声信噪比可表示为:
![]() (6)
(6)
对于非正弦信号,这个方程可以作为一个很好的近似。
另一个相关的方面是ADC相对于待量化信号的峰值或平均值的限幅电平(或满量程值)。此参数仅适用于分辨率大于1位的ADC,因为对于1位ADC,单阈值为零电压,仅保留符号信息。在本文中,我们把限幅电平指为待量化信号的均方根值。考虑到PMCW调制的性质,溢出信号几乎是恒定的包络。因此,它可以很好地映射到ADC的全范围。在本文的其余部分中,我们假设将ADC的全量程设置为溢出信号的均方根值的1.2倍。
与量化相关的一个微妙效应是抖动。在考虑的系统中,接收到的目标反射远小于ADC的满量程。如果没有热噪声,由于量化,信号会发生明显的退化。如果信号幅度波动小于±1/2LSB,其中LSB是最低有效位水平,则甚至无法检测到,但量化后实现了较大的处理增益。然而,如果在这个非常小的信号上加上噪声,就会使总的信号在更大的范围内摆动。因此,通过ADC后的处理增益,信号可以从噪声中提取出来。
5 仿真结果和讨论
在本节中,我们给出了两个目标的仿真结果:一个在1.25 m处以3.83 m/s的速度远离雷达,另一个在9.59 m处以10.03 m/s的速度向雷达移动。首先考虑了不量化的参考仿真,然后研究了量化的影响,最后讨论了抖动对PMCW雷达系统的重要性。
A 参考仿真
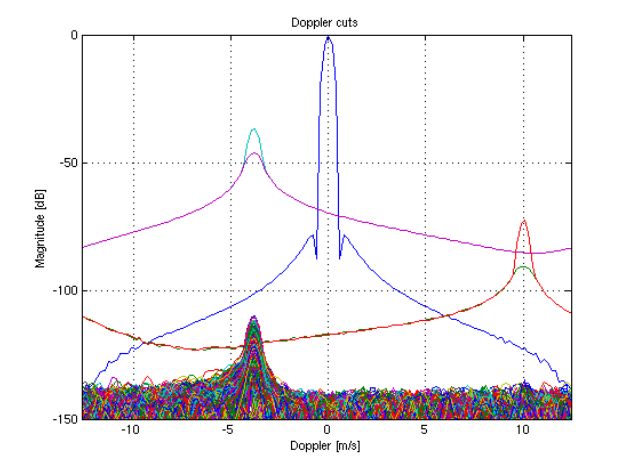
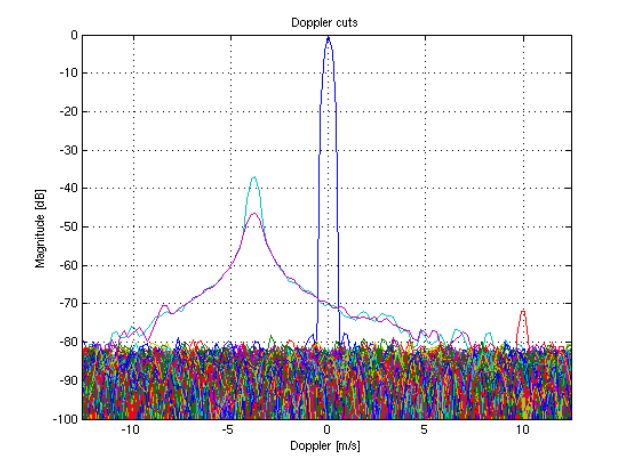
我们首先考虑一个没有ADC和人为低热噪声的参考仿真,通过将噪声温度设置为0.001 K来实现。结果如图2(a)所示。该图显示了接收信号的幅度与它们的多普勒频移的关系。所有的距离bin都以不同的颜色绘制在彼此的顶部。最强烈的信号是由外溢引起的;用蓝色曲线表示,其最大值在所有后续图中归一化为0 dB。
这种没有量化和热噪声的仿真证实了不存在[2]中所解释的距离旁瓣。两个移动的目标在两个距离内产生反射(目标1:紫色和青色,目标2:红色和绿色),但这是因为它们在停留时间内移动到另一个距离bin内;它不是由距离旁瓣引起的。通过对静止目标的仿真和选择精确的初始目标位置,使目标在整个停留时间内保持在相同的距离内,证实了这一点。没有距离副瓣是一个非常重要的特征:大的溢出将完全隔离在第一个距离bin中,因此不能掩盖目标。
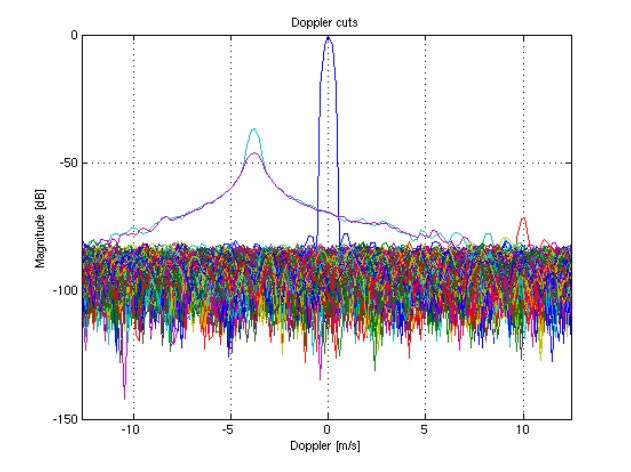
在图2(b)中给出了第二个参考仿真。在这里,噪声温度被设置为300k的实际水平,但尚未应用量化。目标信噪比分别降至47 dB和11 dB。与之前的仿真结果相比,很明显,在没有ADC的正常工作状态下,性能受到热噪声的限制,而不是受到来自其他距离/多普勒bin目标的干扰。该结果证实,在ADC之后,通过在数字域中应用足够的处理增益,可以将信号从热噪声中提升出来。在下一小节中,我们将把量化的影响添加到这些参考场景中,以确定所需的ADC分辨率。
(a)无热噪声(T=0.001 K)。
(b)加入热噪声(T=300 K)。
图2 参考仿真无量化噪声。左:目标不扩散到多个距离副瓣(例如,溢出仍然局限于“蓝色”距离bin)。右图:在正常运行状态下,性能受热噪声限制,而不受溢出或其他目标的干扰。
B 量化影响
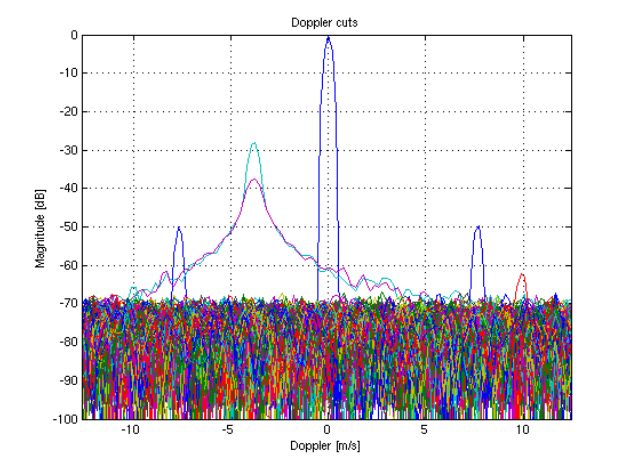
量化后的仿真结果如图3所示。从左上到右下考虑了四种可能的分辨率:4位、3位、2位和1位。请注意,与图2相比,y轴的范围已减小到100 dB。
与图2(b)的参考场景相比,图3(a)所示的4位ADC量化不会导致任何性能下降。这个结果在两个方面至关重要。首先,它证实了PMCW雷达信号上的量化噪声可以通过ADC后的数字处理增益来减轻。换句话说,即使根据(6)的4位ADC的动态范围被限制在大约26 dB,它仍然可以检测到比最大信号小70 dB以上的目标反射,这通常是溢出。其次,即使在量化之后,所有的目标和溢出仍然局限在自己的距离bin内。因此,有限的ADC分辨率不会导致较弱目标反射被较强目标反射掩盖。
3位和2位量化的仿真结果分别如图3(b)和图3(c)所示。在这些情况下,总体底噪从最强反射(4位)以下的80 dB上升到75 dB(3位)和70 dB(2位)。这种效应降低了最小目标反射的信噪比裕度,从而降低了检测和表征性能。同时,在±7.71 m/s处,外溢多普勒特性的畸变峰逐渐增大。如果将多普勒信号用于目标表征,这些杂散可能会产生问题。峰值的完美对称性可能会被表征算法利用,将它们标记为扭曲而不是幽灵反射。
最后,在图3(d)中显示了一个1位量化的仿真。由于强溢出信号的掩蔽效应,目标反射信号全部丢失。请注意,理想的1位ADC(实际上是具有完全零直流偏置的阈值检测器)与非常高的处理增益相结合,理论上仍然可以将小反射信号从量化噪声中提升出来。在实践中,这是不可能实现的,因为完美的零直流偏置无法实现,因为处理增益受到非平稳场景的最大停留时间的限制。
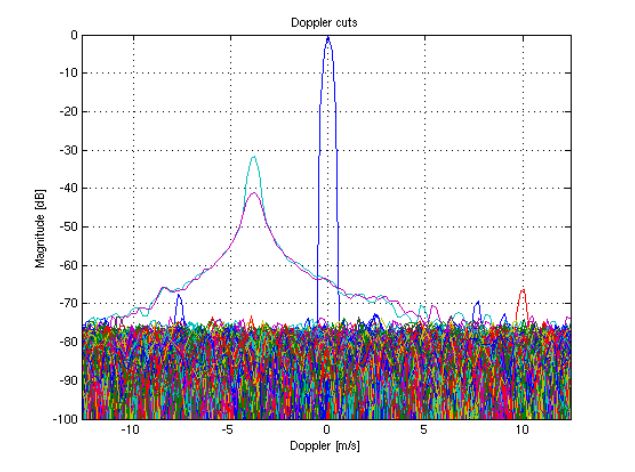
(a) 4位。
(b) 3位。
(c) 2位。

(d) 1位。
图3 噪声信号的量化影响。4位ADC不会导致信号退化。如果可以容忍多普勒域的失真,一个3位或2位ADC就足够了。1位ADC不能在考虑的场景中工作。
C 抖动影响
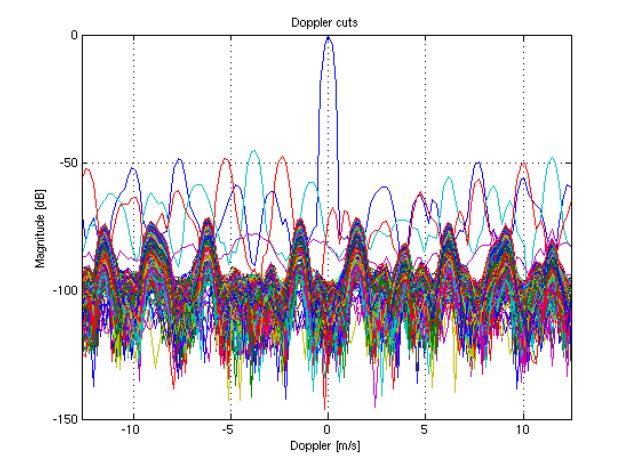
在图4中,我们最后给出了两个仿真结果,以强调抖动在PMCW雷达系统中的重要性。在这些仿真中,通过将噪声温度设置为0.001 K,热噪声再次被人为地降低到低水平。因为没有热噪声,所以不会发生抖动。进行3位和2位量化,分别如图4(a)和图4(b)所示。将这些结果分别与图3(b)和图3(c)进行对比,我们清楚地看到,在没有热噪声引起抖动的情况下,系统性能完全被破坏。
(a) 3位。

(b) 2位。
D 总结:需要的ADC分辨率
一般来说,对于给定的PMCW雷达系统,应该选择的ADC分辨率很大程度上取决于:
信号链路预算,主要受目标RCS和距离、TX和RX天线数量、TX功率和RX噪声系数的影响;
从发射器到接收器的溢出或泄漏的程度;
可实现的处理增益,由LC(积分)、M(积累)和N (FFT)决定
后积累处理类型:仅检测或检测分类。
从所提出的结果中,我们得出结论,在先进的CMOS中,当前最先进的ADC设计可以满足人员检测的要求[7]。在考虑的场景中,一个4位ADC可以在没有明显多普勒失真的情况下处理所需的信号电平。如果需要,额外的一位分辨率(5位ADC)可以将无失真范围提高![]() 倍。如果不需要详细的多普勒特性,则分辨率可以降低到3位甚至2位,而不会对检测性能产生重大影响。
倍。如果不需要详细的多普勒特性,则分辨率可以降低到3位甚至2位,而不会对检测性能产生重大影响。
6 结论
我们提出了ADC量化对PMCW雷达性能影响的高层次系统分析。这一分析得出了重要的结论。首先,如果选择零距离旁瓣的扩频码,PMCW可以具有非常明显的模糊函数,并且这种有利的特征不会被低分辨率ADC降低:目标仍然限制在自己的距离/多普勒bin。因此,诸如发射-接收溢出之类的大信号不会掩盖较小的目标反射。其次,通过数字处理增益可以降低PMCW雷达信号中的量化噪声。相关、积累和FFT分析可以恢复深埋在热噪声和量化噪声中的信号反射。第三,抖动是一种关键的机制,可以使所考虑的信噪比机制正常运行。
更具体地说,对于79 GHz PMCW人员检测雷达,我们可以得出结论,在考虑的场景中,4位ADC不会导致性能下降。如果不进行多普勒表征,分辨率可以降低到3位或2位。