第二篇【传奇开心果短博文系列】Python的OpenCV库技术点案例示例:图像处理
传奇开心果短博文系列
- 系列短博文目录
-
- Python的OpenCV库技术点案例示例短博文系列
- 博文目录
-
- 一、项目目标
- 二、第一个示例代码
- 三、第二个示例代码
- 四、第三个示例代码
- 五、第四个示例代码
- 六、第五个示例代码
- 七、知识点归纳总结
系列短博文目录
Python的OpenCV库技术点案例示例短博文系列
博文目录
一、项目目标
 OpenCV图像处理:包括图像滤波、边缘检测、图像变换、颜色空间转换等功能,写示例代码。
OpenCV图像处理:包括图像滤波、边缘检测、图像变换、颜色空间转换等功能,写示例代码。
二、第一个示例代码




import cv2
import numpy as np
# 读取图像
img = cv2.imread('input.jpg')
# 图像滤波
blur = cv2.GaussianBlur(img, (5, 5), 0)
# 边缘检测
edges = cv2.Canny(img, 100, 200)
# 图像变换
rows, cols = img.shape[:2]
M = cv2.getRotationMatrix2D((cols/2, rows/2), 45, 1)
dst = cv2.warpAffine(img, M, (cols, rows))
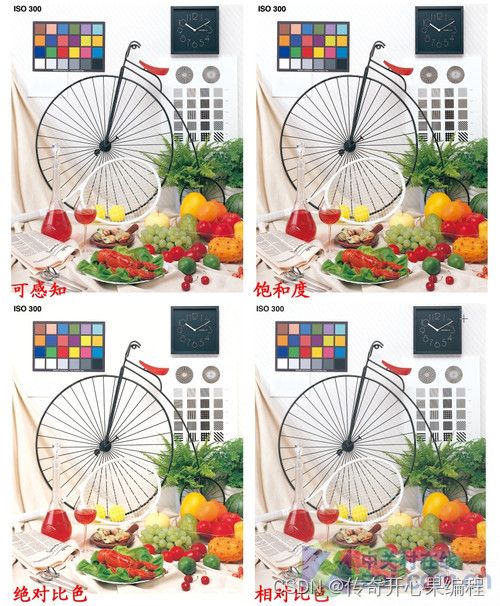
# 颜色空间转换
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 显示结果
cv2.imshow('Original', img)
cv2.imshow('Blurred', blur)
cv2.imshow('Edges', edges)
cv2.imshow('Transformed', dst)
cv2.imshow('HSV', hsv)
cv2.waitKey(0)
cv2.destroyAllWindows()
三、第二个示例代码




import cv2
import numpy as np
# 读取图像
img = cv2.imread('input.jpg')
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 膨胀和腐蚀
kernel = np.ones((5,5),np.uint8)
dilation = cv2.dilate(thresh, kernel, iterations=1)
erosion = cv2.erode(thresh, kernel, iterations=1)
# 透视变换
pts1 = np.float32([[56,65],[368,52],[28,387],[389,390]])
pts2 = np.float32([[0,0],[300,0],[0,300],[300,300]])
M = cv2.getPerspectiveTransform(pts1,pts2)
perspective = cv2.warpPerspective(img,M,(300,300))
# 转换为LAB颜色空间
lab = cv2.cvtColor(img, cv2.COLOR_BGR2LAB)
# 显示结果
cv2.imshow('Original', img)
cv2.imshow('Gray', gray)
cv2.imshow('Thresh', thresh)
cv2.imshow('Dilation', dilation)
cv2.imshow('Erosion', erosion)
cv2.imshow('Perspective', perspective)
cv2.imshow('LAB', lab)
cv2.waitKey(0)
cv2.destroyAllWindows()
四、第三个示例代码

import cv2
import numpy as np
# 读取图像
img = cv2.imread('input.jpg')
# 图像缩放
resized = cv2.resize(img, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_CUBIC)
# 旋转图像
rows, cols = img.shape[:2]
M = cv2.getRotationMatrix2D((cols/2, rows/2), 90, 1)
rotated = cv2.warpAffine(img, M, (cols, rows))
# 图像平移
M = np.float32([[1, 0, 100], [0, 1, 50]])
translated = cv2.warpAffine(img, M, (cols, rows))
# 图像融合
img2 = cv2.imread('input2.jpg')
blended = cv2.addWeighted(img, 0.7, img2, 0.3, 0)
# 显示结果
cv2.imshow('Resized', resized)
cv2.imshow('Rotated', rotated)
cv2.imshow('Translated', translated)
cv2.imshow('Blended', blended)
cv2.waitKey(0)
cv2.destroyAllWindows()
五、第四个示例代码


import cv2
import numpy as np
# 读取图像
img = cv2.imread('input.jpg')
# 边缘保留滤波
dst = cv2.edgePreservingFilter(img, flags=1, sigma_s=60, sigma_r=0.4)
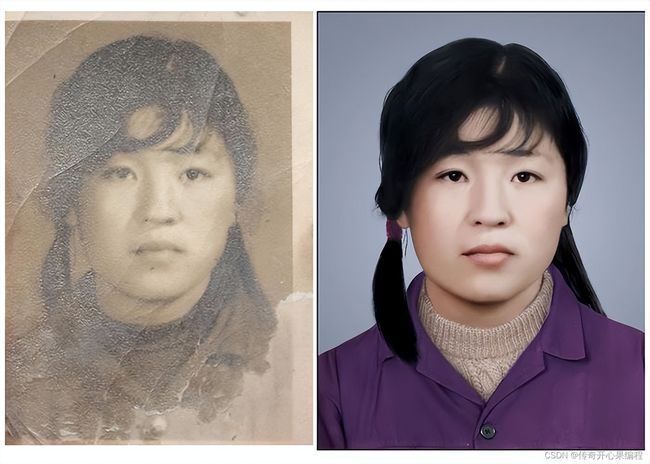
# 图像修复
mask = np.zeros(img.shape[:2], np.uint8)
mask[100:300, 100:400] = 255
inpainted = cv2.inpaint(img, mask, inpaintRadius=3, flags=cv2.INPAINT_TELEA)
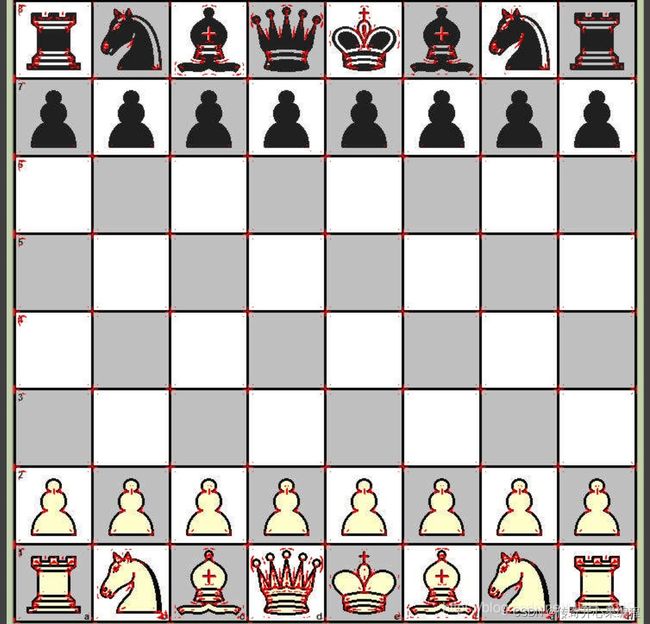
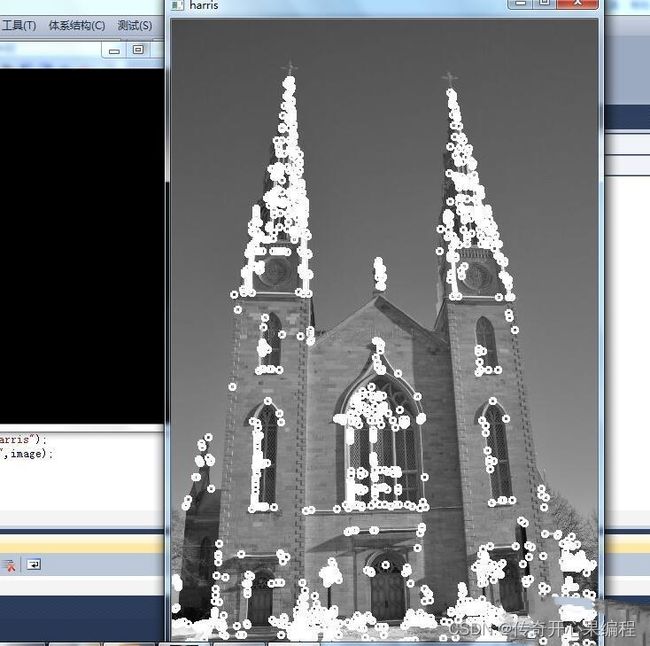
# 角点检测
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
corners = cv2.goodFeaturesToTrack(gray, maxCorners=25, qualityLevel=0.01, minDistance=10)
# 标记角点
for corner in corners:
x, y = corner.ravel()
cv2.circle(img, (x, y), 5, (0, 0, 255), -1)
# 显示结果
cv2.imshow('Edge Preserving Filter', dst)
cv2.imshow('Inpainted', inpainted)
cv2.imshow('Corners', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
六、第五个示例代码



import cv2
import numpy as np
# 读取图像
img = cv2.imread('input.jpg')
# 图像金字塔
lower_reso = cv2.pyrDown(img)
higher_reso = cv2.pyrUp(img)
# 角点检测与追踪
feature_params = dict( maxCorners = 100, qualityLevel = 0.3, minDistance = 7, blockSize = 7 )
lk_params = dict( winSize = (15,15), maxLevel = 2, criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
p0 = cv2.goodFeaturesToTrack(cv2.cvtColor(img, cv2.COLOR_BGR2GRAY), mask = None, **feature_params)
old_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 创建随机颜色
color = np.random.randint(0,255,(100,3))
# 光流追踪
mask = np.zeros_like(img)
while True:
ret, frame = cap.read()
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)
good_new = p1[st==1]
good_old = p0[st==1]
for i,(new,old) in enumerate(zip(good_new,good_old)):
a,b = new.ravel()
c,d = old.ravel()
mask = cv2.line(mask, (a,b),(c,d), color[i].tolist(), 2)
frame = cv2.circle(frame,(a,b),5,color[i].tolist(),-1)
img = cv2.add(frame,mask)
cv2.imshow('frame',img)
k = cv2.waitKey(30) & 0xff
if k == 27:
break
old_gray = frame_gray.copy()
p0 = good_new.reshape(-1,1,2)
# 关闭摄像头
cap.release()
cv2.destroyAllWindows()
七、知识点归纳总结
在上面的代码示例中,我们涉及了许多计算机视觉的常见操作和技术。以下是这些知识点的归纳总结:
 1. 读取和显示图像:使用OpenCV库的
1. 读取和显示图像:使用OpenCV库的cv2.imread()和cv2.imshow()函数读取和显示图像。
-
图像缩放:使用
cv2.resize()函数对图像进行缩放操作。 -
图像旋转:使用
cv2.getRotationMatrix2D()和cv2.warpAffine()函数对图像进行旋转操作。 -
图像平移:使用
cv2.warpAffine()函数对图像进行平移操作。 -
图像融合:使用
cv2.addWeighted()函数对两幅图像进行融合操作。 -
边缘保留滤波:使用
cv2.edgePreservingFilter()函数进行边缘保留滤波操作。 -
图像修复:使用
cv2.inpaint()函数对图像进行修复操作。 -
角点检测与追踪:使用
cv2.goodFeaturesToTrack()和光流法进行角点检测和追踪操作。 -
图像金字塔:使用
cv2.pyrDown()和cv2.pyrUp()函数进行图像金字塔操作。
 以上这些知识点涵盖了计算机视觉中的许多常见操作和技术,可以帮助我们对图像进行处理、分析和理解。这些技术在许多领域都有广泛的应用,包括图像处理、计算机视觉、机器学习等。希望这些知识点的归纳总结对您有所帮助!
以上这些知识点涵盖了计算机视觉中的许多常见操作和技术,可以帮助我们对图像进行处理、分析和理解。这些技术在许多领域都有广泛的应用,包括图像处理、计算机视觉、机器学习等。希望这些知识点的归纳总结对您有所帮助!