用Python和OpenGL探索数据可视化(三维篇)- 与照相机“共舞”
备注:本系列文章介绍如何使用Python和OpenGL 4.5进行数据可视化的开发。因此请参考《准备工作(一)Windows下检测显卡和OpenGL信息》一文检测读者的电脑是否支持OpenGL 4.5版本(基本上2018年之后销售的电脑都可以支持OpenGL 4.5)。
再参考《准备工作(二)配置Windows下VS Code + Python + OpenGL开发环境》配置本文需要的开发环境)
前几节通过绘制三维坐标轴和三维立方体,我们已经初步了解了OpenGL如何通过一系列的数学变换,把三维世界的图形映射到了二维屏幕上(见下图):
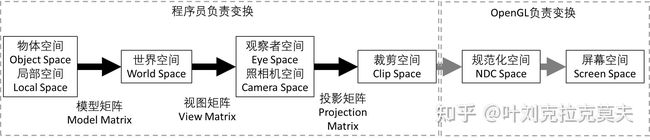
本节我们详细讨论视图矩阵和投影矩阵。如上图所示,作为开发人员,我们需要自己完成前四步的空间变换,OpenGL只需要程序开发人员提供几个变换矩阵给它,正如前几节顶点着色器中的如下代码:
gl_Position = projection * view * model * vec4(position, 1.0);
之后OpenGL会完成后两步的变换。
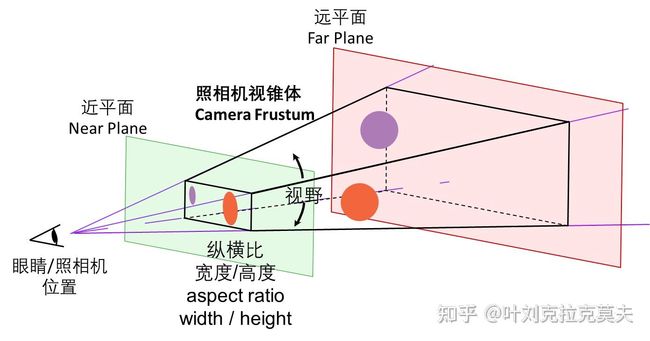
“照相机”和“照相机空间”是人类参考人眼成像的过程抽象出来的概念,从而便于进行数学变换:
还是通过代码的实践来帮助我们的理解。
运行VS Code,选择File菜单里“Open Folder”,打开D:\pydev\pygl,在basic文件夹下新建一个camera_app.py文件

在camera_app.py输入以下代码:
import sys
parent_dir = "../pygl"
sys.path.append(parent_dir)
import ctypes
import OpenGL.GL as gl
import glm
import imgui
import numpy as np
import pygl
from common import App, AxesHelper, Cube
class CameraApp(App):
# 初始化着色器,vao vbo等
def setupVertex(self) -> None:
gl.glEnable(gl.GL_DEPTH_TEST)
self.background_color = glm.vec4(0.3, 0.3, 0.3, 1.0)
self.cube = Cube(0.4, "textures/cratetex.png")
self.cube_axes = AxesHelper(0.6, 5.0)
self.world_axes = AxesHelper(0.9, 2.0)
self.imgui_window_width = 250
self.imgui_window_height = 450
self.initCamera()
def initCamera(self) ->None:
self.camera_position = glm.vec3(0.0, 0.0, 3.0)
self.camera_target = glm.vec3(0.0, 0.0, 0.0)
self.camera_fov = 45.0
self.camera_aspect = float(self.width)/self.height
self.camera_near = 1.0
self.camera_far = 6.0
# 配置imgui界面元素
def showImGui(self)->None:
# 增加ImGui窗口的透明度
imgui_style = imgui.get_style()
color = imgui_style.colors[imgui.COLOR_WINDOW_BACKGROUND]
imgui_style.colors[imgui.COLOR_WINDOW_BACKGROUND] = imgui.Vec4(color.x,
color.y, color.z, 0.6)
imgui.begin("照相机设置")
_, self.cube.use_vertex_color = imgui.checkbox("使用顶点颜色",
self.cube.use_vertex_color)
if imgui.button("重置"):
self.initCamera()
_, pos = imgui.slider_float3("位置", self.camera_position.x,
self.camera_position.y, self.camera_position.z, 0.0, 10.0)
self.camera_position = glm.vec3(pos)
_, tg = imgui.slider_float3("目标", self.camera_target.x,
self.camera_target.y, self.camera_target.z, -0.5, 0.5)
self.camera_target = glm.vec3(tg)
_, self.camera_fov = imgui.slider_float("视野", self.camera_fov,5, 170)
_, self.camera_near = imgui.slider_float("近面", self.camera_near,1.0, 10.0)
_, self.camera_far = imgui.slider_float("远面", self.camera_far,1.0, 10.0)
imgui.text("视图矩阵")
imgui.begin_table("view data", 4)
for i in range(4):
imgui.table_next_row()
for j in range(4):
imgui.table_next_column()
imgui.text(str("{:.3f}").format(self.view[j, i]))
imgui.end_table()
imgui.text("投影矩阵")
imgui.begin_table("projection data", 4)
for i in range(4):
imgui.table_next_row()
for j in range(4):
imgui.table_next_column()
imgui.text(str("{:.3f}").format(self.projection[j, i]))
imgui.end_table()
imgui.end()
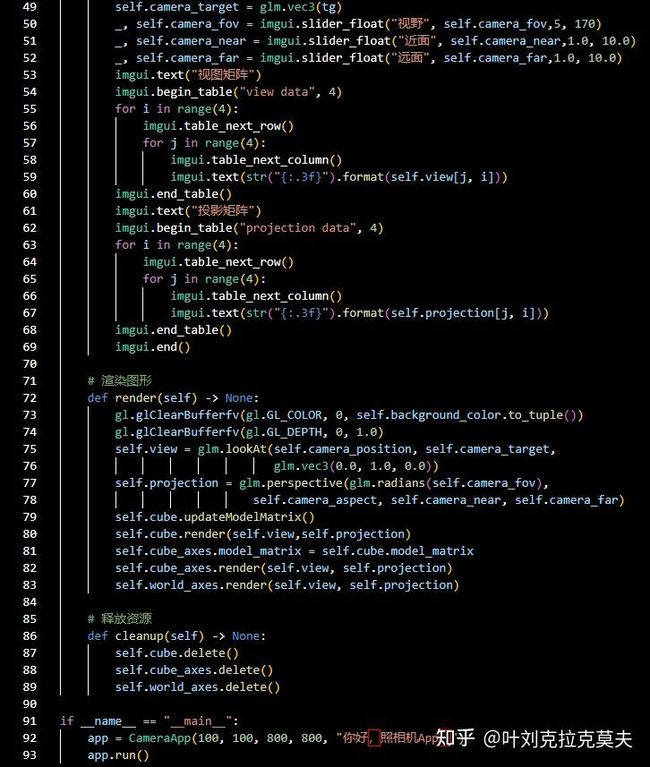
# 渲染图形
def render(self) -> None:
gl.glClearBufferfv(gl.GL_COLOR, 0, self.background_color.to_tuple())
gl.glClearBufferfv(gl.GL_DEPTH, 0, 1.0)
self.view = glm.lookAt(self.camera_position, self.camera_target,
glm.vec3(0.0, 1.0, 0.0))
self.projection = glm.perspective(glm.radians(self.camera_fov),
self.camera_aspect, self.camera_near, self.camera_far)
self.cube.updateModelMatrix()
self.cube.render(self.view,self.projection)
self.cube_axes.model_matrix = self.cube.model_matrix
self.cube_axes.render(self.view, self.projection)
self.world_axes.render(self.view, self.projection)
# 释放资源
def cleanup(self) -> None:
self.cube.delete()
self.cube_axes.delete()
self.world_axes.delete()
if __name__ == "__main__":
app = CameraApp(100, 100, 800, 800, "你好,照相机App!")
app.run()

点击VS Code右上角的三角形图标,运行代码,结果如下:

“位置”旁边的三个滑动条分别代表了照相机在X、Y、Z三个方向上的坐标,拖动鼠标就可以改变照相机的观察位置,同时视图矩阵就会发生相应的变化。

“目标”旁边的三个滑动条分别代表了照相机观察的目标中心位置的X、Y、Z坐标,拖动鼠标就可以改变照相机的观察目标位置,同时视图矩阵也会发生相应的变化。

“视野”、“近面”、“远面”旁边的滑动条分别代表了照相机投影变换中的几个参数,可以改变投影矩阵,下图是近平面和远平面裁剪了部分立方体时的截图:

点击“使用顶点颜色”可以让立方体在彩色模式和纹理模式之间切换

可以任意时刻用鼠标点击重置,可以让照相机回到初始设置。
以上就是“用Python和OpenGL探索数据可视化(三维篇)- 与照相机“共舞””的全部内容,希望对你有所帮助。
关于Python技术储备
学好 Python 不论是就业还是做副业赚钱都不错,但要学会 Python 还是要有一个学习规划。最后大家分享一份全套的 Python 学习资料,给那些想学习 Python 的小伙伴们一点帮助!
一、Python所有方向的学习路线
Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。

二、Python必备开发工具

三、Python视频合集
观看零基础学习视频,看视频学习是最快捷也是最有效果的方式,跟着视频中老师的思路,从基础到深入,还是很容易入门的。

四、实战案例
光学理论是没用的,要学会跟着一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。

五、Python练习题
检查学习结果。

六、面试资料
我们学习Python必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有阿里大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。

最后祝大家天天进步!!
上面这份完整版的Python全套学习资料已经上传至CSDN官方,朋友如果需要可以直接微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】。
