STM32——串口
STM32——串口
1.常用函数介绍
串口发送接收函数:
HAL_UART_Transmit(); 串口发送数据,使用超时管理机制
HAL_UART_Receive(); 串口接收数据,使用超时管理机制
HAL_UART_Transmit_IT(); 串口中断模式发送
HAL_UART_Receive_IT(); 串口中断模式接收
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart,
uint8_t *pData, uint16_t Size, uint32_t Timeout)
作用:以阻塞的方式发送指定字节的数据
- 形参 1 :UART_HandleTypeDef 结构体类型指针变量
- 形参 2:指向要发送的数据地址
- 形参 3:要发送的数据大小,以字节为单位
- 形参 4:设置的超时时间,以ms单位
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart,uint8_t *pData, uint16_t Size)
作用:以中断的方式接收指定字节的数据
- 形参 1 是 UART_HandleTypeDef 结构体类型指针变量
- 形参 2 是指向接收数据缓冲区
- 形参 3 是要接收的数据大小,以字节为单位
此函数执行完后将清除中断,需要再次调用以重新开启中断。
串口中断回调函数:
HAL_UART_IRQHandler(UART_HandleTypeDef *huart); //串口中断处理函数
HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); //发送中断回调函数
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //接收中断回调函数
状态标记变量:
USART_RX_STA
从0开始,串口中断接收到一个数据(一个字节)就自增1。当数据读取全部OK时候(回车和换行符号来的时
候),那么 USART_RX_STA的最高位置1,表示串口数据接收全部完毕了,然后main函数里面可以处理数据
了。
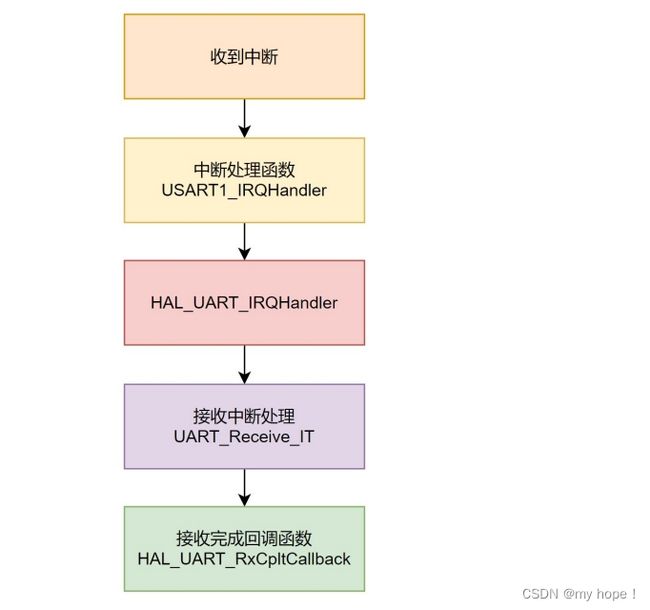
串口接收中断流程
2.串口实验(非中断)
需求:接受串口工具发送的字符串,并将其发送回串口工具。
硬件接线:
TX – A10
RX – A9
一定要记得交叉接线!!
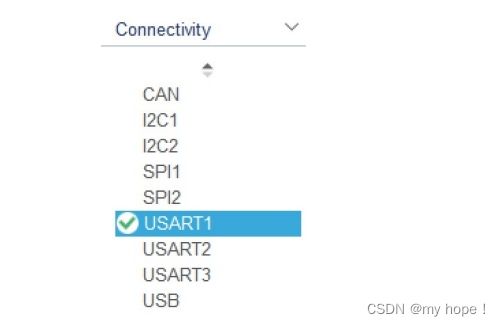
串口配置:
- 选定串口
- 选择模式
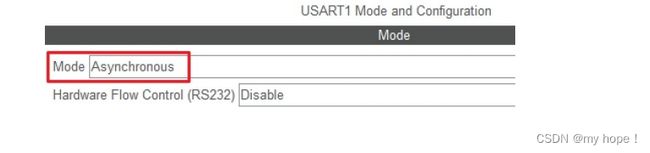
- 串口配置

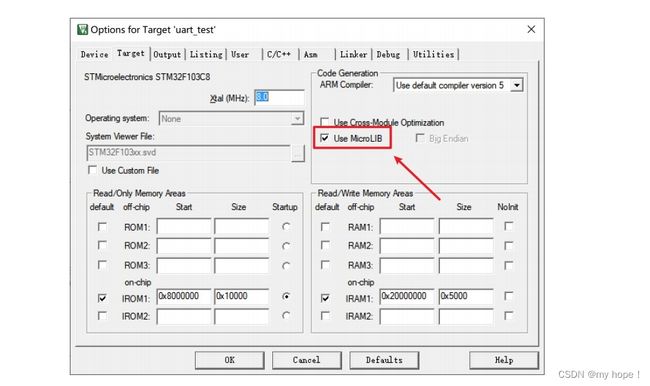
- 使用MicroLIB库
编程实现
#include 3.串口实验(中断)
需求
通过中断的方法接受串口工具发送的字符串,并将其发送回串口工具。
硬件接线:
同上
串口配置:
- 打开中断
编程实现
#include