用STM32手搓一个体温计
前言
市面上大多额温计、测温计精度偏差太大。
而水银温度计,等待时间又太久。
因此就产生了用STM32自己做一个——精度高、便宜、测速快 的产品级 温度仪/体温计的想法。

01
这个温度仪的亮点?
”1精度高,误差小于0.1度
2带有显示屏,可实时查看测温数据
3支持蓝牙传输,支持BLE和SPP
4可直接用手机或电脑接收温度数据
5可以DIY设置报警功能,方便看护儿童时,不知道什么时候又温度升高了,都不敢打个盹
6运行时间长,可以连续使用12个小时以上
7解决 儿童生病时不愿意配合量体温,以及腋下量体温时,不能实时了解发烧情况
那如何通过【硬件、外型、软件设计】实现出这样一个产品级的体温计呢?一起来看看!
02
硬件设计
”
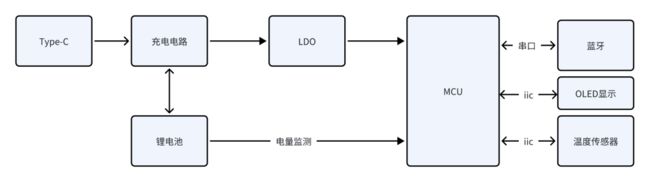
系统框图
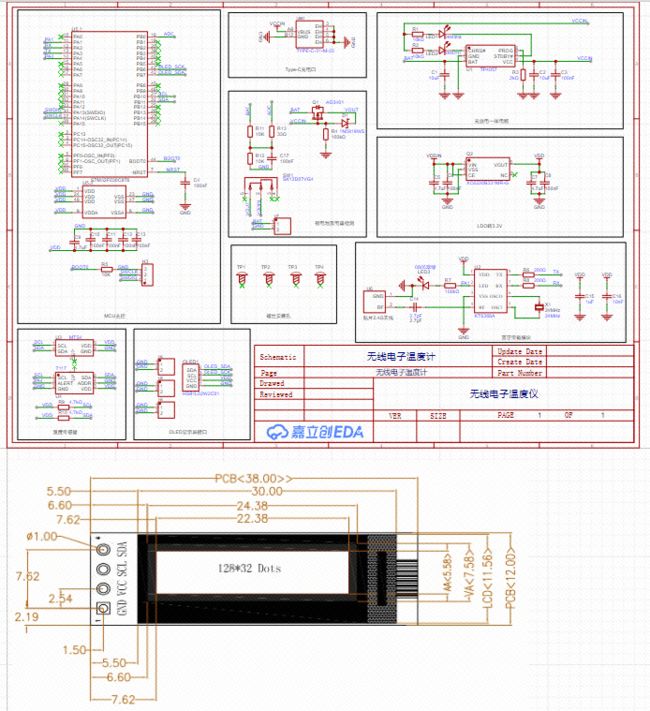
原理图
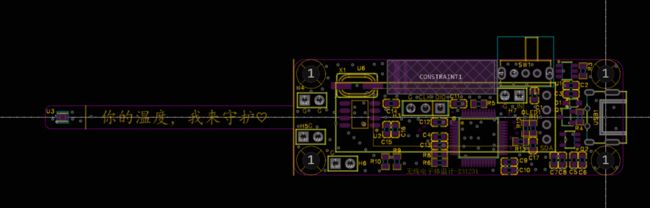
PCB
下面就将电路拆分为5个部分,一 一分析一下电路原理。
01
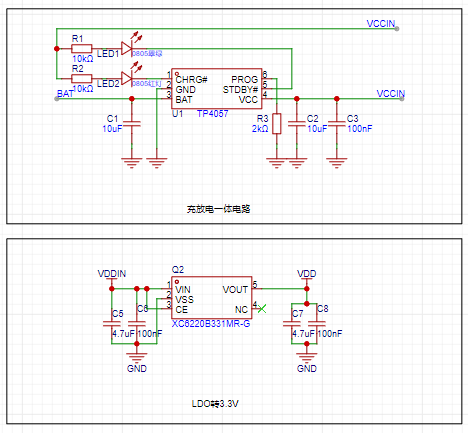
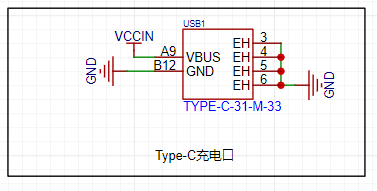
电源部分
充放电芯片采用TP4057,该芯片便宜,支持升压,确保系统供电稳定。
这里通过Type-C给产品充电。
由于系统采用3.3V供电,因此用LDO进行电压转换。
其锂电池采用200ma容量,规格如下:

连接方式是焊接,预留了2.54排针,方便调试。

Type-C选择了microUSB。
02主控部分
系统主控采用stm32f030c8t6。
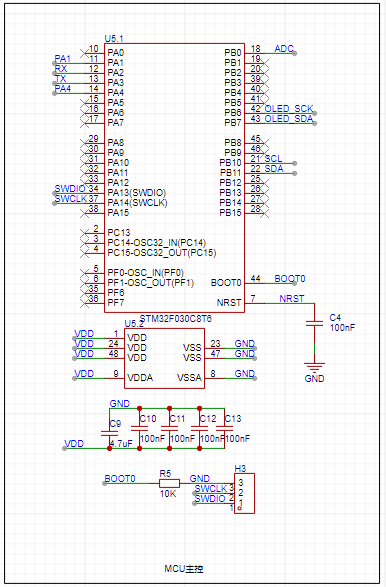
该主控可实现以下功能:
-
ADC采集,也就是检测锂电池电量;
-
串口通信,控制蓝牙芯片,进行数据发送;
-
IIC通信,控制温度传感器,配置以及初始化,最重要的是读取温度;
-
IIC通信,显示电量、蓝牙连接状、实时温度、测量时长等。
-
其它可扩展功能
03蓝牙部分
这里采用KT6368A设计。
该芯片支持双模,具体规格如下:

PS:为了降低功耗建议使用KT6328A,但是这个只支持BLE哦。
相关原理图如下所示:

04显示部分
自己采用了0.91寸的OLED模块,只有4个管脚,如下所示:

我用的是白光的,我试了蓝光的也挺好的,这个看个人喜好了。

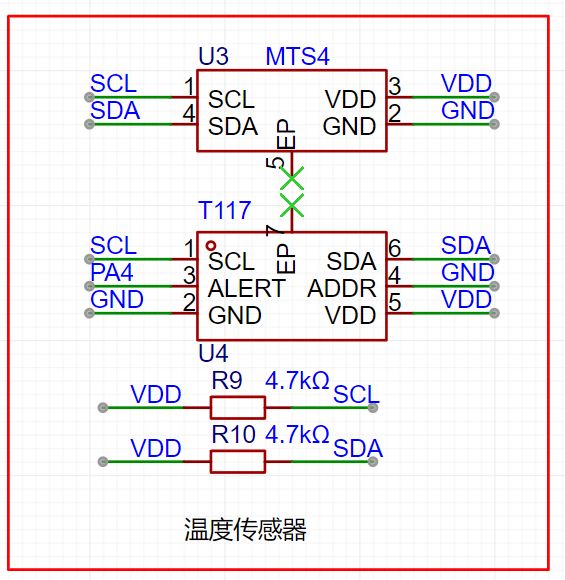
05温度传感器
温度传感器在本项目中,无疑是很重要的存在。
MTS4和T117是我能找到的最具性价比的芯片,精度高且便宜。
T117参数:

-
超低温至-103℃测温!
-
测温精度±0.1℃@+28~+43℃
-
I2C/单总线数字输出
-
分辨率16位/0.004℃
-
测温最快2.2ms可配置
-
支持4路I2C通信地址;
-
超低功耗2μA@1HZ
-
1.8V~5.5V宽电压供电
-
2*2*0.75mm小尺寸
-
DFN6L封装
-
内置112bit EEPROM用户空间。
MTS4参数:

-
I2C协议数字输出
-
可同时兼容数字单总线
-
测温精度±0.1℃@+28℃~+43℃
-
16位输出0.004℃
-
测温速度15.3ms/8.5ms/5.2ms/2.2ms可配置
-
超低功耗3.1μA(AVG=16,1次测量/s)
-
1.6x1.2x0.55mm超小尺寸
-
DFN4L封装
-
内置112bit EEPROM用户空间
对应原理图:
06PCB部分
PCB采用4层板设计,板厚1.6mm。为了能打免费PCB,整体长度设计在10cm以内。
这里的装配孔是m3,建议可以m2。
03
外型设计
”外型我做了3D外壳和面板。
01
外壳部分
3D外壳使用嘉立创EDA设计。
由于我是个新手,所以设计的比较简单。

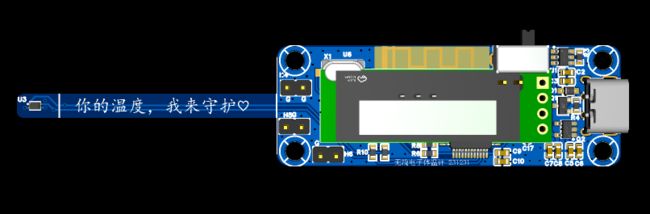
实物是这样子:

02
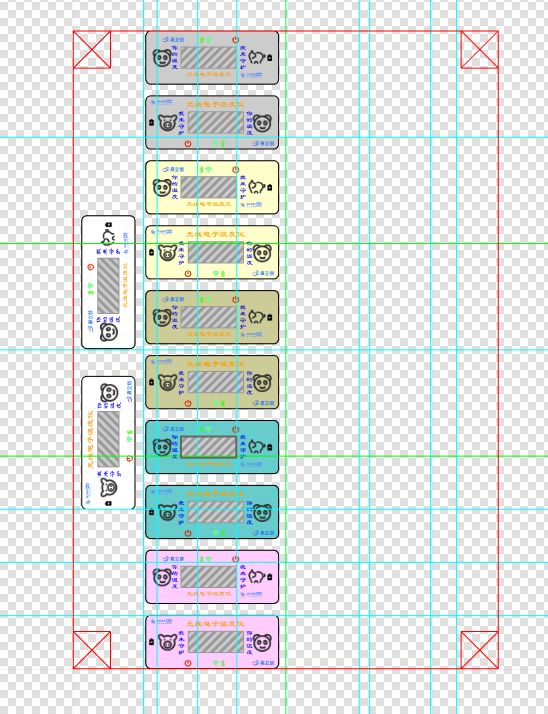
面板部分
这个也是采用嘉立创EDA设计的,为了省钱。
*因为有很多位置需要计算,所以这里有个技巧,可以先导出PCB的DXF,方便定位。
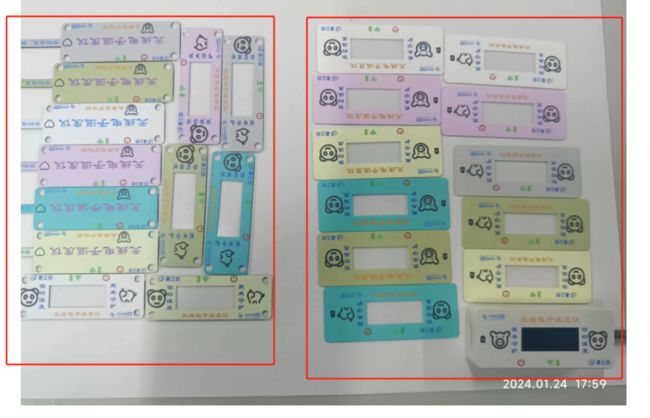
做了很多颜色,实现3D外壳和面板自由了。
设计如下:
实物如下:
04
程序设计
”01
开发工具和环境
采用CubeMX与Keil5结合的方式,使用C语言进行开发。
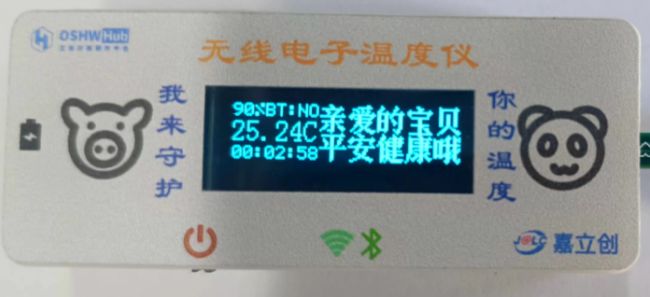
02程序设计思路
1电量采样通过timer+DMA+DAC进行数据采集,timer定时2S,为啥2秒,降低功耗。
之前1s感觉刷新有点快。
2检测蓝牙是否连接,读取PA1管脚状态,若连接显示器显示OK,否则是NO。
3每两秒读取一次温度,根据状态寄存器进行判别是否温度转换完成。
4
OLED显示2s更新一次。
效果如下图所示:
03
温度传感器驱动
目前只焊接成功了T117芯片,这里给大家展示一下这个驱动的编写,如下所示。
这里是头文件:
C++#ifndef __SENSER_H#define __SENSER_H#include "stm32f0xx_hal.h"typedef enum{//Temp_Cmd//测温模式CONTI_CONVERT = 0x00, //连续测量温度STOP_CONVERT = 0x40, //停止测量温度SINGLE_CONVERT = 0xc0, //单次测量温度//加热模式OFF_HEATING = 0xf0, //低位清0,加热关闭ON_HEATING = 0x0A, //加热开启//Temp_Cfg//测温频率FRE_8times = 0x00, //每秒8次FRE_4times = 0x20, //每秒4次FRE_2times = 0x40, //每秒2次FRE_1times = 0x60, //每秒1次FRE_2s = 0x80, //每2秒1次FRE_4s = 0xa0, //每4秒1次FRE_8s = 0xc0, //每8秒1次FRE_16s = 0xe0, //每16秒1次//平均次数AVG_1 = 0xe7, //位清0,转换时间2.1msAVG_8 = 0x08, //转换时间5.2msAVG_16 = 0x10, //转换时间8.5msAVG_32 = 0x18, //转换时间15.3ms//低功耗模式OFF_PD = 0xfe, //位清0,不进入低功耗模式ON_PD = 0x01, //进入低功耗模式//EE_CmdEE_DOWN = 0xb6, //装载EE值到寄存器EE_COPY = 0x08, //将寄存器中数值保存到EE中EE_RESET = 0x6a, //软复位,装载EE值到寄存器,与EE对应的部分,寄存器值恢复到EE保存值,不与EE对应的部分,寄存器值恢复到默认值//Alert_Mode//报警开关OFF_ALERT = 0x00, //清0,报警关ON_ALERT = 0x80, //报警开//ModeTL_CLEAR = 0xbf, //位清0,TL为报警清除门限阈值TL_ALERT = 0x40, //TL为报警门限下阈值//极性ALERT_LO = 0xdf, //位清0,低电平有效ALERT_HI = 0x20, //高电平有效//报警端口模式选择ALERT_IO = 0xef, //位清0,用作温度报警CONVERT_FINI = 0x10, //用作测温完成标志} I2C_CMD;typedef enum{Temp_lsb = 0x00, //Temp_msb = 0x01, //Crc_temp = 0x02, //Status = 0x03, //Temp_Cmd = 0x04, //默认值0x40:停止测量,不加热Temp_Cfg = 0x05, //默认值0x69:每秒1次,AVG_8,进入低功耗Alert_Mode = 0x06, //默认值0x00:报警关,报警模式为TL解除报警,报警低电平有效,标志位表示温度报警Th_lsb = 0x07,Th_msb = 0x08,Tl_lsb = 0x09,Tl_msb = 0x0A,Crc_scratch = 0x0B,EE_Cmd = 0x17, //默认值0x00:无操作Romcode1 = 0x18,Romcode2 = 0x19,Romcode3 = 0x1A,Romcode4 = 0x1B,Romcode5 = 0x1C,Romcode6 = 0x1D,Romcode7 = 0x1E,crc_romcode = 0x1F,} REG;void T117_Init(void);uint8_t T117_ID(void);//获取IDuint8_t T117_R_REG(uint8_t REG,uint8_t *DAT);//读寄存器uint8_t T117_W_REG(uint8_t REG,uint8_t DAT);//写寄存器uint8_t T117_R_TEMP(float *DAT); //读温度#endif
这里是C文件:
C++#include "SENSOR.h"#include "myiic.h"#define T117_WADD 0x80#define T117_RADD 0x81//测温指令寄存器(Temp_Cmd),地址 0x04//#define Temp_Cmd 0x04//配置寄存器(Temp_Cfg),地址 0x05//#define Temp_Cfg 0x05//状态寄存器(Status),地址 0x03//#define Status 0x03/*位 内容描述 默认数值7 温度高线报警跟踪 0:温度报警未触发 1:温度报警触发 ‘0’6 温度低线报警跟踪 0:温度报警未触发 1:温度报警触发 ‘0’5 温度转换状态 0:温度转换完成 1:温度转换过程中 ‘0’4 E2PROM 状态 0:未处于读写状态 1:处于读写状态 ‘0’3 加热状态 0:未处于加热状态 1:处于加热状态 ‘0’2 温度报警错误提示 0:TH 大于 TL 1:TH 小于等于 TL ‘0’1:0 预留 ‘00’*///报警模式寄存器(Alert_Mode),地址 0x06//#define Alert_Mode 0x06/*位 内容描述 默认数值7 报警功能开关(Alert_en)0:关闭1:开启 ‘0’6 报警模式(IM)选择0:高于 TH 报警+低于 TL 解除报警1:高于 TH 报警+低于 TL 报警 ‘0’5 报警极性(POL)选择0:低有效1:高有效 ‘0’4 报警端口输出模式(FUNC)选择0:输出温度报警标志位1:输出测温完成标志位 ‘0’3:0 预留 ‘0000’*/void T117_Init(void){T117_W_REG(Temp_Cmd,0x00);//连续测温不加热T117_W_REG(Temp_Cfg,0x99);//每秒0.5次,32次平均,进入低功耗T117_W_REG(Alert_Mode,0x10);//不报警,输出测温完成标志位}uint8_t T117_ID(void) //获取ID{uint8_t temp=0;IIC2_Start();IIC2_Send_Byte(T117_WADD);temp=IIC2_Wait_Ack();if(temp) {IIC2_Stop();return 1;}IIC2_Send_Byte(0x19);temp=IIC2_Wait_Ack();if(temp) {IIC2_Stop();return 2;}IIC2_ReStart();IIC2_Send_Byte(T117_RADD);temp=IIC2_Wait_Ack();if(temp) {IIC2_Stop();return 3;}temp=IIC2_Read_Byte();IIC2_NAck();IIC2_Stop();return temp;}uint8_t T117_R_REG(uint8_t REG,uint8_t *DAT) //读寄存器{uint8_t temp=0;IIC2_Start();IIC2_Send_Byte(T117_WADD);temp=IIC2_Wait_Ack();if(temp) {IIC2_Stop();return 1;}IIC2_Send_Byte(REG);temp=IIC2_Wait_Ack();if(temp) {IIC2_Stop();return 2;}IIC2_ReStart();IIC2_Send_Byte(T117_RADD);temp=IIC2_Wait_Ack();if(temp) {IIC2_Stop();return 3;}*DAT=IIC2_Read_Byte();IIC2_NAck();IIC2_Stop();return 0;}uint8_t T117_W_REG(uint8_t REG,uint8_t DAT) //写寄存器{uint8_t temp=0;IIC2_Start();IIC2_Send_Byte(T117_WADD);temp=IIC2_Wait_Ack();if(temp) {IIC2_Stop();return 1;}IIC2_Send_Byte(REG);temp=IIC2_Wait_Ack();if(temp) {IIC2_Stop();return 2;}IIC2_Send_Byte(DAT);temp=IIC2_Wait_Ack();if(temp) {IIC2_Stop();return 3;}IIC2_Stop();return 0;}uint8_t T117_R_TEMP(float *DAT) //读寄存器{uint16_t rx=0;uint8_t data=0;if(T117_R_REG(0x01,&data)) return 1;//rx = data<<8;rx = data;rx <<=8;if(T117_R_REG(0x00,&data)) return 2;rx += data;*DAT=(int16_t)rx;*DAT=25.0+(*DAT)/256.0;return 0;}
04
蓝牙驱动
关于KT6368A的驱动实现,可以去梁山派的模块移植手册查看详情,具体实现我这里就不再赘述。
手册入口【建议收藏】:https://lceda001.feishu.cn/wiki/JNvYwEU5SiGldFkNcxncYXhZnZc

模块移植手册-第一部
05
OLED驱动
这个0.91寸显示屏,网上有很多移植好的,这里也不再赘述,可以去梁山派的模块移植手册查看详情。

06
其它串口IIC驱动
这个是老生常谈。
串口使用的是USART2,支持printf。
IIC采用IO模拟方式,这样不受IO位置控制了。
具体啰嗦的代码就不这里贴了,节省空间哦,可以在开源原文里下载源文件。
07
main函数实现
这里是整个实现方式,对应前面的设计思路,这里包含一些中断和回调函数的实现。
C++/* USER CODE BEGIN Header *//********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************//* USER CODE END Header *//* Includes ------------------------------------------------------------------*/#include "main.h"#include "adc.h"#include "dma.h"#include "tim.h"#include "usart.h"#include "gpio.h"/* Private includes ----------------------------------------------------------*//* USER CODE BEGIN Includes */#include "oled.h"#include "bsp_KT6368A.h"#include "myiic.h"#include "SENSOR.h"#include "usart.h"/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*//* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*//* USER CODE BEGIN PD */#define VOT 3.287/* USER CODE END PD *//* Private macro -------------------------------------------------------------*//* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV */uint16_t adc_value[4]={0};uint8_t Flag=0;float temp=0,x,y,z;uint32_t second=0;uint8_t hh,mm,ss;/* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/void SystemClock_Config(void);/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*//* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/int main(void){/* USER CODE BEGIN 1 */uint8_t DAT;uint16_t len;uint8_t i=0;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_DMA_Init();MX_ADC_Init();MX_TIM1_Init();MX_USART2_UART_Init();/* USER CODE BEGIN 2 */T117_Init();OLED_Init();HAL_Delay(2000);//Set_SppName();HAL_Delay(1000);//Set_BLEName();HAL_Delay(1000);//Set_Power();HAL_ADC_Start_DMA(&hadc,(uint32_t *)(&(adc_value[0])),4);HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */char s[20];if(Flag){Flag=0;x=adc_value[0]/4095.0*VOT*2;if(x>=4.2){sprintf(s,"99%%");}else if(x>=4.06){sprintf(s,"90%%");}else if(x>=3.98){sprintf(s,"80%%");}else if(x>=3.92){sprintf(s,"70%%");}else if(x>=3.87){sprintf(s,"60%%");}else if(x>=3.82){sprintf(s,"50%%");}else if(x>=3.79){sprintf(s,"40%%");}else if(x>=3.77){sprintf(s,"30%%");}else if(x>=3.74){sprintf(s,"20%%");}else if(x>=3.68){sprintf(s,"10%%");}else if(x>=3.45){sprintf(s," 5%%");}else if(x>=3.33){sprintf(s," 1%%");}else{sprintf(s," 0%%");}OLED_ShowString(0,0,s,8,1);//6*8hh=second/3600;mm=(second%3600)/60;ss=second%60;sprintf(s,"%02d:%02d:%02d",hh,mm,ss);OLED_ShowString(0,24,s,8,1);//6*8// temp=adc_value[2]/4095.0*VOT;// y=25+(1.43-temp)/0.0043;// sprintf(s,"%6.3f",y);// OLED_ShowString(0,18,s,12,1);//6*8}if(T117_R_REG(0x03,&DAT)==0){if((DAT&0x20)==0){// DAT=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_4);// printf("A4:%d\r\n",DAT);// if(!(T117_R_REG(0x00,&DAT))){printf("LSB:%x\r\n",DAT);}// if(!(T117_R_REG(0x01,&DAT))){printf("MSB:%x\r\n",DAT);}DAT=T117_R_TEMP(&z);sprintf(s,"%5.2fC",z);OLED_ShowString(0,7,s,16,1);}}if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)){if(USART_RX_STA&0x8000){len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度HAL_UART_Transmit(&huart2,(uint8_t*)USART_RX_BUF,len,1000); //发送接收到的数据while(__HAL_UART_GET_FLAG(&huart2,UART_FLAG_TC)!=SET); //等待发送结束printf("\r\n\r\n");//插入换行USART_RX_STA=0;printf("\r\nLEN:%d\r\n",len);}if(DAT==0){printf("T=%5.2fC\r\n",z);}sprintf(s,"BT:OK");OLED_ShowString(18,0,s,8,1);//6*8printf("V=%6.3fV\r\n",x);printf("%02d:%02d:%02d\r\n",hh,mm,ss);}else{sprintf(s,"BT:NO");OLED_ShowString(18,0,s,8,1);//6*8}OLED_ShowChinese(48,0,0,16,1);OLED_ShowChinese(64,0,1,16,1);OLED_ShowChinese(80,0,2,16,1);OLED_ShowChinese(96,0,3,16,1);OLED_ShowChinese(112,0,4,16,1);//OLED_ShowChinese(48,16,5,16,1);OLED_ShowChinese(64,16,6,16,1);OLED_ShowChinese(80,16,7,16,1);OLED_ShowChinese(96,16,8,16,1);OLED_ShowChinese(112,16,9,16,1);OLED_Refresh();HAL_Delay(2000);}/* USER CODE END 3 */}/*** @brief System Clock Configuration* @retval None*/void SystemClock_Config(void){RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK){Error_Handler();}}/* USER CODE BEGIN 4 */void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc){//HAL_ADC_Stop(&hadc1);//HAL_ADC_Stop_DMA(&hadc1);//HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_13);Flag=1;second += 2;HAL_ADC_Start_DMA(hadc,(uint32_t *)(&(adc_value[0])),4);}/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/void Error_Handler(void){/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */}#ifdef USE_FULL_ASSERT/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/void assert_failed(uint8_t *file, uint32_t line){/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */}#endif /* USE_FULL_ASSERT */