基于YOLOv8的工业油污缺陷检测,多种优化方法---DCNV4_SPPF助力涨点,[email protected]提升近四个点(一)
本文主要内容:详细介绍了工业油污缺陷检测整个过程,从数据集到训练模型到结果可视化分析,以及如何优化提升检测性能。
加入DCNV4_SPPF [email protected]由原始的0.648提升至0.684
1.工业油污数据集介绍
三星油污缺陷类别:头发丝和小黑点,["TFS","XZW"]

数据集大小:660张
数据集地址:https://download.csdn.net/download/m0_63774211/87741209


2.基于YOLOv8的工业油污检测
2.1 修改sanxing.yaml
path: ./data/sanxing # dataset root dir
train: trainval.txt # train images (relative to 'path') 118287 images
val: test.txt # val images (relative to 'path') 5000 images
# number of classes
nc: 2
# class names
names:
0: TFS
1: XZW2.2 开启训练
import warnings
warnings.filterwarnings('ignore')
from ultralytics import YOLO
if __name__ == '__main__':
model = YOLO('ultralytics/cfg/models/v8/yolov8.yaml')
model.train(data='data/sanxing/sanxing.yaml',
cache=False,
imgsz=640,
epochs=200,
batch=16,
close_mosaic=10,
workers=0,
device='0',
optimizer='SGD', # using SGD
project='runs/train',
name='exp',
)3.结果可视化分析

YOLOv8 summary (fused): 168 layers, 3006038 parameters, 0 gradients, 8.1 GFLOPs
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 3/3 [00:03<00:00, 1.30s/it]
all 66 187 0.741 0.554 0.648 0.302
TFS 66 130 0.604 0.423 0.531 0.242
XZW 66 57 0.877 0.684 0.766 0.361F1_curve.png:F1分数与置信度(x轴)之间的关系。F1分数是分类的一个衡量标准,是精确率和召回率的调和平均函数,介于0,1之间。越大越好。
TP:真实为真,预测为真;
FN:真实为真,预测为假;
FP:真实为假,预测为真;
TN:真实为假,预测为假;
精确率(precision)=TP/(TP+FP)
召回率(Recall)=TP/(TP+FN)
F1=2*(精确率*召回率)/(精确率+召回率)

PR_curve.png :PR曲线中的P代表的是precision(精准率),R代表的是recall(召回率),其代表的是精准率与召回率的关系。

R_curve.png :召回率与置信度之间关系

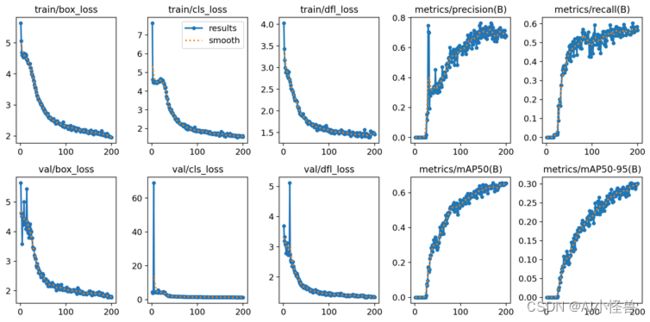
results.png
mAP_0.5:0.95表示从0.5到0.95以0.05的步长上的平均mAP.
 预测结果:
预测结果:

4.如何优化模型
4.1 加入DCNv4
YOLOv8全网首发:新一代高效可形变卷积DCNv4如何做二次创新?高效结合SPPF-CSDN博客

论文: https://arxiv.org/pdf/2401.06197.pdf
摘要:我们介绍了可变形卷积v4 (DCNv4),这是一种高效的算子,专为广泛的视觉应用而设计。DCNv4通过两个关键增强解决了其前身DCNv3的局限性:去除空间聚合中的softmax归一化,增强空间聚合的动态性和表现力;优化内存访问以最小化冗余操作以提高速度。与DCNv3相比,这些改进显著加快了收敛速度,并大幅提高了处理速度,其中DCNv4的转发速度是DCNv3的三倍以上。DCNv4在各种任务中表现出卓越的性能,包括图像分类、实例和语义分割,尤其是图像生成。当在潜在扩散模型中与U-Net等生成模型集成时,DCNv4的性能优于其基线,强调了其增强生成模型的可能性。在实际应用中,将InternImage模型中的DCNv3替换为DCNv4来创建FlashInternImage,无需进一步修改即可使速度提高80%,并进一步提高性能。DCNv4在速度和效率方面的进步,以及它在不同视觉任务中的强大性能,显示了它作为未来视觉模型基础构建块的潜力。
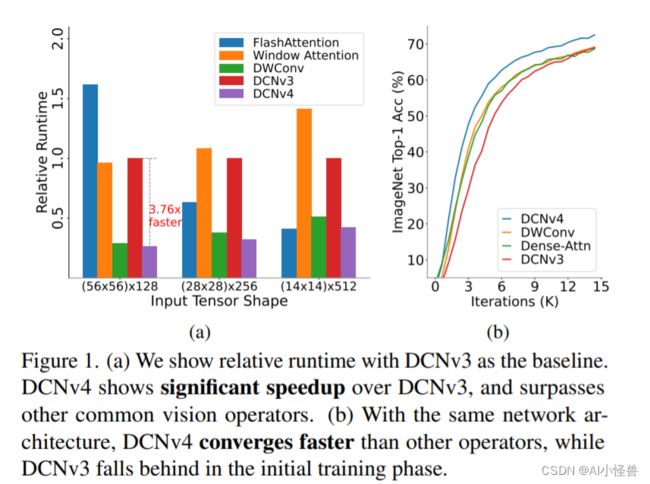
图1所示。(a)我们以DCNv3为基准显示相对运行时间。DCNv4比DCNv3有明显的加速,并且超过了其他常见的视觉算子。(b)在相同的网络架构下,DCNv4收敛速度快于其他视觉算子,而DCNv3在初始训练阶段落后于视觉算子。
为了克服这些挑战,我们提出了可变形卷积v4 (DCNv4),这是一种创新的进步,用于优化稀疏DCN算子的实际效率。DCNv4具有更快的实现速度和改进的操作符设计,以增强其性能,我们将详细说明如下:
首先,我们对现有实现进行指令级内核分析,发现DCNv3已经是轻量级的。计算成本不到1%,而内存访问成本为99%。这促使我们重新审视运算符实现,并发现DCN转发过程中的许多内存访问是冗余的,因此可以进行优化,从而实现更快的DCNv4实现。
其次,从卷积的无界权值范围中得到启发,我们发现在DCNv3中,密集关注下的标准操作——空间聚合中的softmax归一化是不必要的,因为它不要求算子对每个位置都有专用的聚合窗口。直观地说,softmax将有界的0 ~ 1值范围放在权重上,并将限制聚合权重的表达能力。这一见解使我们消除了DCNv4中的softmax,增强了其动态特性并提高了其性能。
因此,DCNv4不仅收敛速度明显快于DCNv3,而且正向速度提高了3倍以上。这一改进使DCNv4能够充分利用其稀疏特性,成为最快的通用核心视觉算子之一。
我们进一步将InternImage中的DCNv3替换为DCNv4,创建FlashInternImage。值得注意的是,与InternImage相比,FlashInternImage在没有任何额外修改的情况下实现了50 ~ 80%的速度提升。这一增强定位FlashInternImage作为最快的现代视觉骨干网络之一,同时保持卓越的性能。在DCNv4的帮助下,FlashInternImage显著提高了ImageNet分类[10]和迁移学习设置的收敛速度,并进一步提高了下游任务的性能。
图2。(a)注意力(Attention)和(b) DCNv3使用有限的(范围从0 ~ 1)动态权值来聚合空间特征,而注意力的窗口(采样点集)是相同的,DCNv3为每个位置使用专用的窗口。(c)卷积对于聚合权值具有更灵活的无界值范围,并为每个位置使用专用滑动窗口,但窗口形状和聚合权值是与输入无关的。(d) DCNv4结合两者的优点,采用自适应聚合窗口和无界值范围的动态聚合权值。
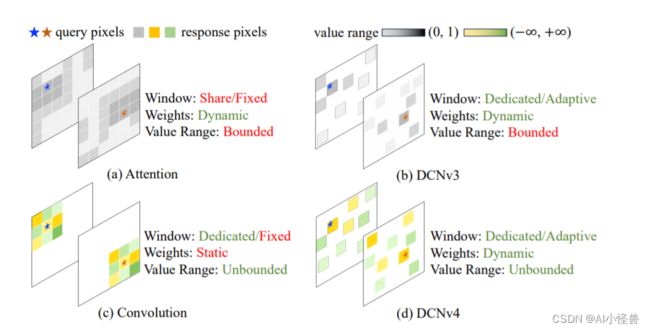
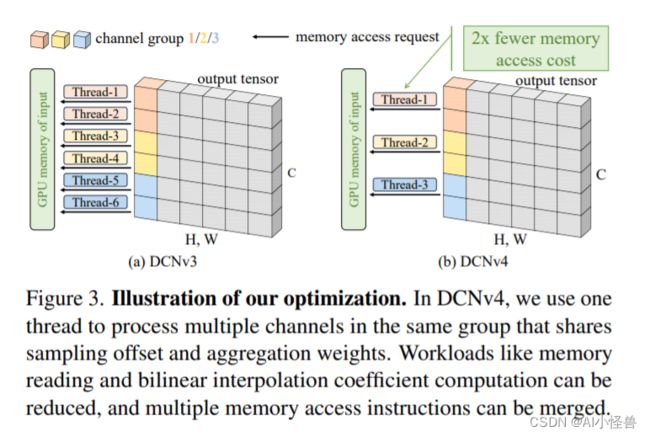
图3。说明我们的优化。在DCNv4中,我们使用一个线程来处理同一组中的多个通道,这些通道共享采样偏移量和聚合权重。可以减少内存读取和双线性插值系数计算等工作负载,并且可以合并多个内存访问指令。
4.2 DCNv4和SPPF结合
# Ultralytics YOLO , AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, DCNv4_SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 21 (P5/32-large)
- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)
4.3 实验结果分析
[email protected]由原始的0.648提升至0.684
YOLOv8_DCNv4_SPPF summary (fused): 179 layers, 4860278 parameters, 0 gradients, 9.6 GFLOPs
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 3/3 [00:04<00:00, 1.38s/it]
all 66 187 0.705 0.635 0.684 0.344
TFS 66 130 0.608 0.515 0.544 0.257
XZW 66 57 0.802 0.754 0.825 0.43
5.系列篇
系列篇1:DCNV4_SPPF提升近四个点
系列篇2:自研注意力CPM:提升近五个点